











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroduction
Efficient production in industrial manufacturing processes requires a consistent supply of raw materials (Zhou et al., 2015). The current mechanisms for replenishing raw materials in industrial processes are manual or semi-automatic (Arunkumar et al., 2020). These are based on staff support and sometimes on the use of machinery such as forklifts.
The term Industry 4.0 involves the mixture of physical and cybernetic components in industrial processes (Mourtzis et al., 2019). This is proposed as a turning point in a phase of industrial transformation that aims to enhance production and reduce costs through the increased autonomy of production systems components (Wan et al., 2019). It also implies diversification of production tasks. Factories cease to be specialized entities and acquire a general production approach (Goncalves et al., 2020). In addition, it seeks to improve issues such as sustainability, organization, safety, and production efficiency (Çınar et al., 2020). To reach this, different support areas for this concept are implemented, standing out among them: Additive Manufacturing, Augmented Reality, Simulation, Cloud Computing, Big Data, Security and Information, Internet of Things (IoT), and Autonomous Robotics (AR).
The latter, in the context of Industry 4.0, has different applications. One of the most important challenges is to provide autonomous means for conducting coordinated work (Lins & Givigi, 2021). For this, a research field known as collaborative robotics can be used (Bragança et al., 2019). This is a branch of autonomous robotics that is responsible for generating the means of coordination between team members to solve a particular task (Devi et al., 2024). To achieve this aim, various tools from Artificial Intelligence and Electronics are used to allow robots to fulfill their tasks while interacting with one another.
On the other hand, Evolutionary Robotics (ER) is a distinct field within AR. It promotes the emergence of solutions through evolutionary pressures (Carvalho & Nolfi, 2024). Drawing from species evolution, this field shapes robotic behavior. Evolutionary computation algorithms, such as genetic algorithms (GA), optimize the robot's control system and/or its morphology.
The guiding mechanism of the evolutionary process is an aptitude function. This determines how adapted a robot is to its environment (Silva et al., 2016). When evaluating a group of robots, the fitness function determines the degree of adaptation of individuals to a specific task. This mathematical mechanism allows robots to influence the artificial evolutionary process and favor the emergence of relevant behavior for solving the task.
In literature,the most frequently cited model for output prediction is artificial neural networks (ANN). Motion controllers are implemented using this model and are optimized through artificial evolution. They are favored for their high fault and noise tolerance that come from the electronic components of the robot and the surrounding environment. Consequently, this leads to the pursuit of bio-inspired components, those related to the activity of the brain and nervous system of living beings. This approach is known as neuromorphic engineering (Yang et al., 2020).
An artificial neural network is a computational architecture used for decision-making, classification, and prediction (Abdolrasol et al., 2021). Various topologies and types of networks exist, each suitable for different scenarios. Thus, the choice of the network topology depends on the problem to be solved and its complexity (Cáceres et al., 2020).
The ANN used in evolutionary robotics are known as neurocontrollers. In turn, these take the robots’ sensory information as input. The outputs are coded for the control of the actuators and the internal states of the robot. Artificial evolutionary pressures cause neurocontrollers to be modeled according to the tasks to be performed (Doncieux et al., 2015). This process can modify synaptic weights and/or the network structure (Gupta et al., 2020).
As for ER and cooperative robotics, the emergence of solutions of the first can complement the needs of the second (Howard et al., 2022). Thus, tasks that require coordination between individuals can arise from ER techniques. Similarly, coordination and communication mechanisms can be established according to the adaptive advantages of the group (Steyven et al., 2015). This allows the acquisition of a set of neurocontrollers that can solve a task or a group of tasks by coordinating multiple robots (Hiraga & Ohkura, 2022).
A crucial variable when working with sets of robots is the group configuration, which can be either homogeneous or heterogeneous (Gigliotta, 2018). The homogeneous version occurs if the robots share characteristics such as morphology, electronic components, or control systems. An example of homogeneous groups occurs when the same robot model, equipped with identical sensors and actuators, is used. This ensures that each member has the same ability to solve a task. They are also often called clone robots in terms of the duplication of the chromosome, from the artificial genetic point of view.
The other configuration option for a group of robots is the heterogeneous one. In this configuration, there are robots with distinct characteristics. This can enrich the solution of the task from the differences of the group. However, this can also complicate the establishment of coordination channels.
Within the process of coordinating tasks, communication is an important variable. There are different communication channels, which can be registered by robots through cameras, microphones, and receivers of radio frequency signals (including the Internet). For communication to be established, both a transmitter and a receiver are required. The first is intended to encode and send the message that is to be transmitted. The second has the function of receiving the message, decoding it, and contextualizing it. The message travels via channels, which serve as the means of transmission (Patel et al., 2021). Additionally, a valid signal code is required, which in the case of human beings is usually called language or communication code. This represents a high-level process in the establishment of communication systems, where words emerge and become associated with specific meanings and/or contexts.
In evolutionary robotics, for a communication system to emerge and be established in a set of robots, it must have an adaptive value (Cambier et al., 2020). That is, the communication system must be established through the correct channel, depending on the sensory apparatus of the robot. It is also important that the communication system is useful in resolving the task (Lazaridou & Baroni, 2020). In other words, even if a communication system emerges during the evolutionary process, it will disappear under evolutionary pressures if it is not useful.
Thus, the emergence of the communication system, as well as the coordination mechanisms in a group of robots, should not be biased by the aptitude function. Instead, it is advisable to shape the emergent communication through the complexity of the environment and the task, which serve as leading variables of the communication system (Karten et al., 2023).
In the case of Industry 4.0, using several robots to solve a task means that it can be solved in less time than if it were done by a single robot (Asad et al., 2023). For instance, to maintain the supply chain for the manufacturing process of a particular product, robots play a key role.
The emergence of the behaviors and resources in robot groups presents a strategy to cope with the dynamic environments proposed in Industry 4.0 (Vaidya et al., 2018). The latter represents the possibility of interaction between robots, shipowners, machines, and humans. Hence, robot autonomy is essential for achieving various objectives. As a result, the incorporation of evolutionary robotics into these environments can be useful. One such emerging behavior is communication, which allows the establishment of cooperation channels.
In our paper, we proposed an experiment developed using a simulator. This experiment compared the communication performance of a group of collaborative robots tasked with maintaining the supply chain. Communication within the groups was configured in three versions: no communication channel, visual channel, and radio frequency channel. For this, the fitness function score that they achieved in the evolutionary process was compared when the robots were not equipped with a communication system when they were free to establish the signals and their meanings (visual channel), and when they had communicative capacity, but with a set of preset signals (radiofrequency). This allows robots to establish that ER and emerging communication systems are tools that can be adapted to the needs of Industry 4.0.
This article is organized as follows. The second section delineates the methodological details of the experiment. The results section provides the data from the experimental process. The discussion section outlines the key arguments of the research. Lastly, the conclusion presents the final argument of the study.
Materials and methods
The goal of the experiment was to prove that emerging communication systems are tools that allow us to solve tasks of Industry 4.0. For this, a control group without open communication channels is evaluated. This involves a group with the freedom to generate the signals through an artificial evolutionary process and a communication system with predefined signals.
The framework for autonomous robotics simulation and analysis (FARSA) simulator (Massera et al., 2013) was used for experimentation. This specialized evolutionary-robotics 3D simulator includes optimization algorithms and various ANN topologies. It also encompasses computational models representing robots, such as the MarxBot robot used in the experiments. The MarxBot is designed for teamwork, equipped with a linear camera, a LED ring, and a gripper for attachment to other robots. In addition, it has different sensors and actuators such as infrared, gyroscope, floor infrared, and microphones. FARSA is applied in applications of evolutionary robotics (Pagliuca & Nolfi, 2022), ANN optimization (Milano et al., 2019), coevolutionary processes (Simione & Nolfi, 2020), and the study of emergent communication (Pagliuca & Vitanza, 2023).
The task that needed to be solved involved a supply chain. The robots had to collect raw material from a collection point and take it to the start of the corresponding band. Once processed, the robots transport the finished product to the packing area. Thus, two collection points are established: one for raw materials and another for the finished products. In addition, two deposit points are set up: one at the start of the conveyor belt and another at the commencement of the packaging process.
The simulated environment consisted of a gray rectangular arena. The collection areas were denoted by circular targets on the white floor. The deposit areas were indicated by circular targets on the black floor (Figure 1). Additionally, a green cylinder was positioned at the center of the production areas and a blue cylinder at the center of the packaging areas.
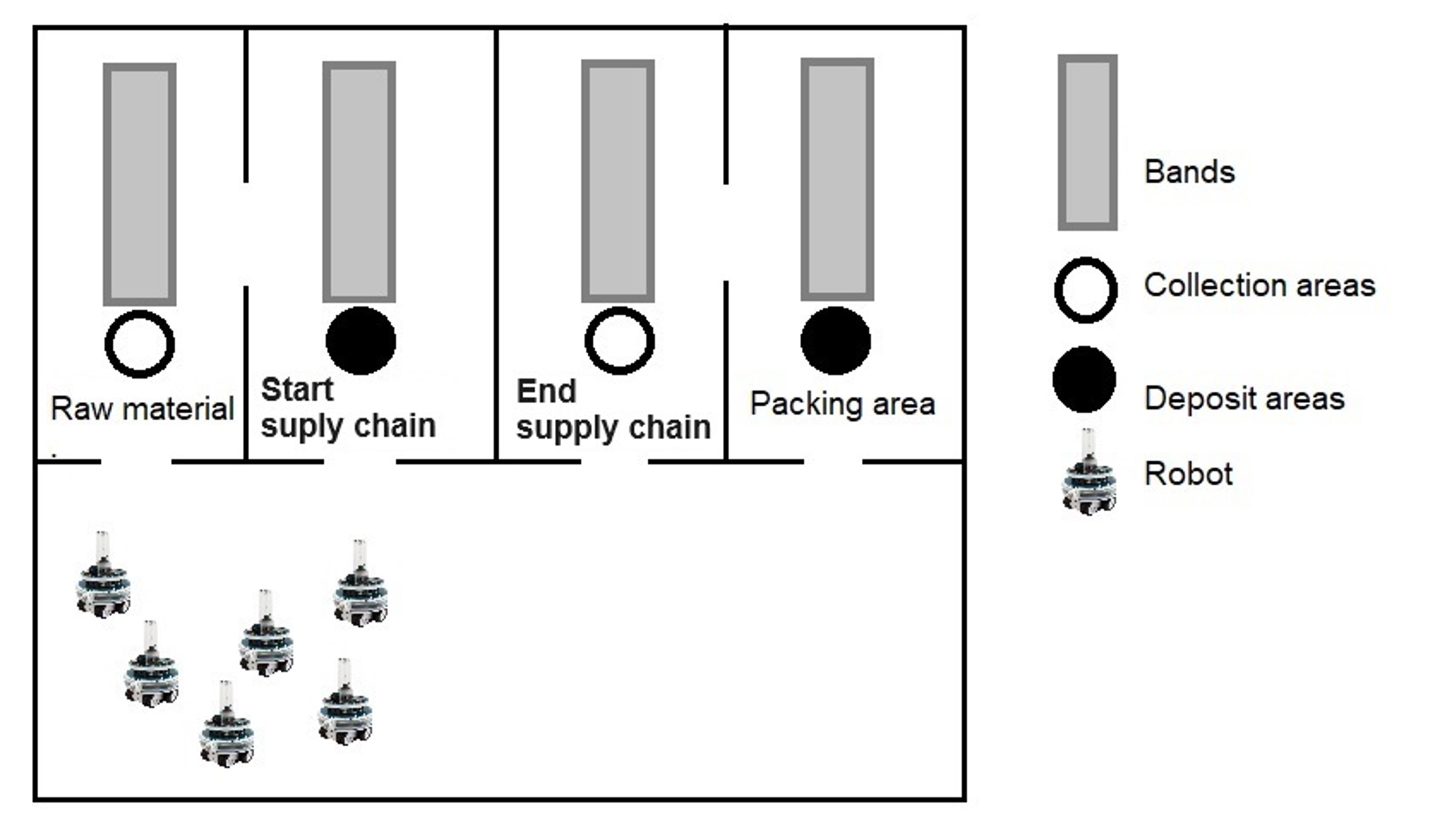
Source: Author’s own elaboration.
Figure 1 Virtual environment. A group of six robots must participate in collection and deposit tasks in a manufacturing process.
The robots were positioned randomly within the lower half of the arena. Each manufacturing process zone was housed in a separate room. The rooms that belonged to the same process had two entrances: one leading from the main hallway and another connecting the two rooms. There was no partition wall between the collection room of the manufacturing process and the packaging area. Deposit and collection tasks were included as scheduled subroutines. Therefore, they were activated in specific situations arising from the detection of each zone.
For the experiments, the sensors used were: 24 outside infrared sensors (IR), a ground sensor (GS), and the RGB (red, blue, and green) components of the linear camera, divided into five segments of 72° each. As actuators, the robot’s rotational motors were employed. All controllers in the group were identical, forming a homogeneous population.
For the optimization of the control system, a steady-state genetic algorithm was used. In contrast to generational genetic algorithms, the steady-state approach relies on mutation and replacement. The mutation rate was set at 2%. Each evolutionary process comprised 600 generations with 20 individuals each, representing a variant of the neurocontroller to be optimized. Every group of robots underwent nine trials, each consisting of 600 steps.
Three experimental groups were created: no communication, visual communication, and wireless communication. Each of them was a part of the manipulated variable in the communication. In all experimental groups, a three-layer dense feed-forward neural network was used; and in all cases, the weights of the synaptic connections were optimized.
For the control system corresponding to the experimental group without communication (Figure 2), the input layer consisted of 26 neurons. Initially, the infrared sensors (IR) were grouped into eight sets, each containing three neighboring sensors, through a simple fusion of sensors (Palacios-Leyva et al., 2017). Additionally, three neurons were dedicated to detecting colors on the floor (GS: gray, white, and black), and five were allocated for each component of the camera’s linear input (R-G-B), making a total of 15 neurons. In the hidden layer, 15 neurons were placed, and four neurons were used in the output layer. Two of these corresponded to the movement of the motors, directly coding rotation speed in both positive and negative sense. The remaining two neurons were designated to activate scheduled collection and deposit routines. This experimental group represents the absence of communication and serves as a control group.
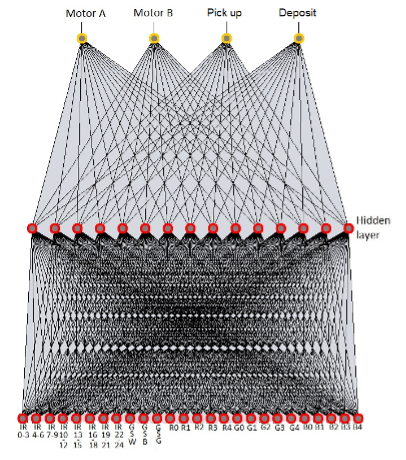
Source: Author’s own elaboration.
Figure 2 ANN for the experimental group without communication. It is a dense feed-forward three-layered network.
In the case of the experimental visual communication group, which represented groups of robots that could communicate using the LED ring (Figure 3), the control system had 26 neurons in the input layer. These neurons correspond to infrared sensors divided into eight groups of three neighbors (IR), three neurons to detect colors on the floor (GS: gray, white, and black), and five neurons for each component of the linear component of the camera (R-G-B). Fifteen neurons were placed in the intermediate layer. The output layer consisted of two neurons that correspond to the movement of the motors and one neuron that activated the red tone of the LED ring. Additionally, two neurons associated with the collection and deposit routines were included. This experimental group represents the capability of emitting emergency signals through evolutionary pressures.
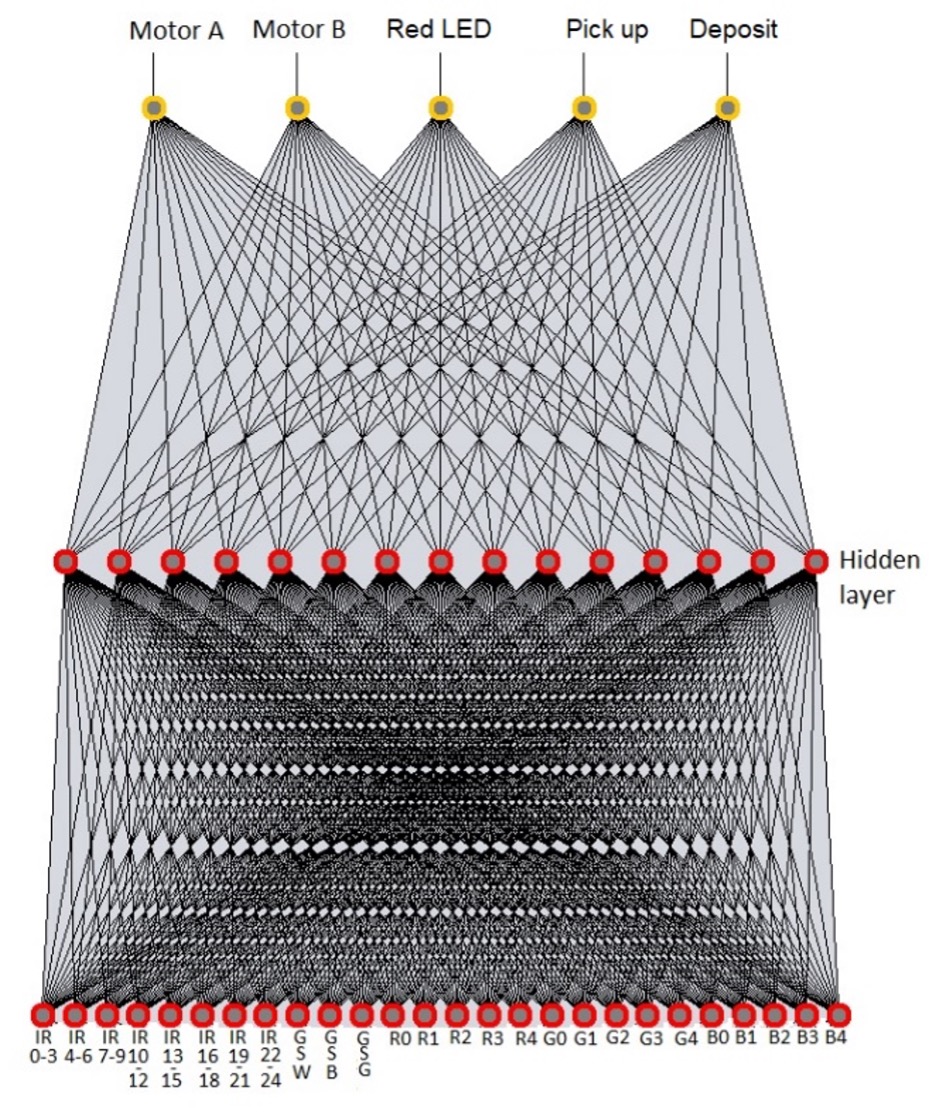
Source: Author’s own elaboration.
Figure 3 ANN for the experimental group with light communication. It is a dense three-layered network with feed-forward connections.
Finally, the experimental wireless communication group represented groups of robots that shared information via radiofrequency (Figure 4). The control system included an input layer with 27 neurons corresponding to the infrared sensors (IR), grouped into eight groups of three nearest sensors. Additionally, there were three neurons to detect colors on the floor (GS: gray, white, and black) and five neurons for each component of the camera’s linear input (R-G-B), plus an additional neuron that detected the presence of the radio frequency signal (RF). In the intermediate layer, 15 neurons were placed. The output layer contained two neurons corresponding to the motors’ movement and a neuron that emitted a radiofrequency signal (RF at output). To limit the number of signals that could be sent, these were reduced to two values, emitted in two situations: (1) when a robot was within the collection zone and (2) when a robot was within the deposit zone. Additionally, there were two neurons for activating the routines of lifting and depositing objects. This group represented a pre-defined communication system and was, therefore, not emergent.
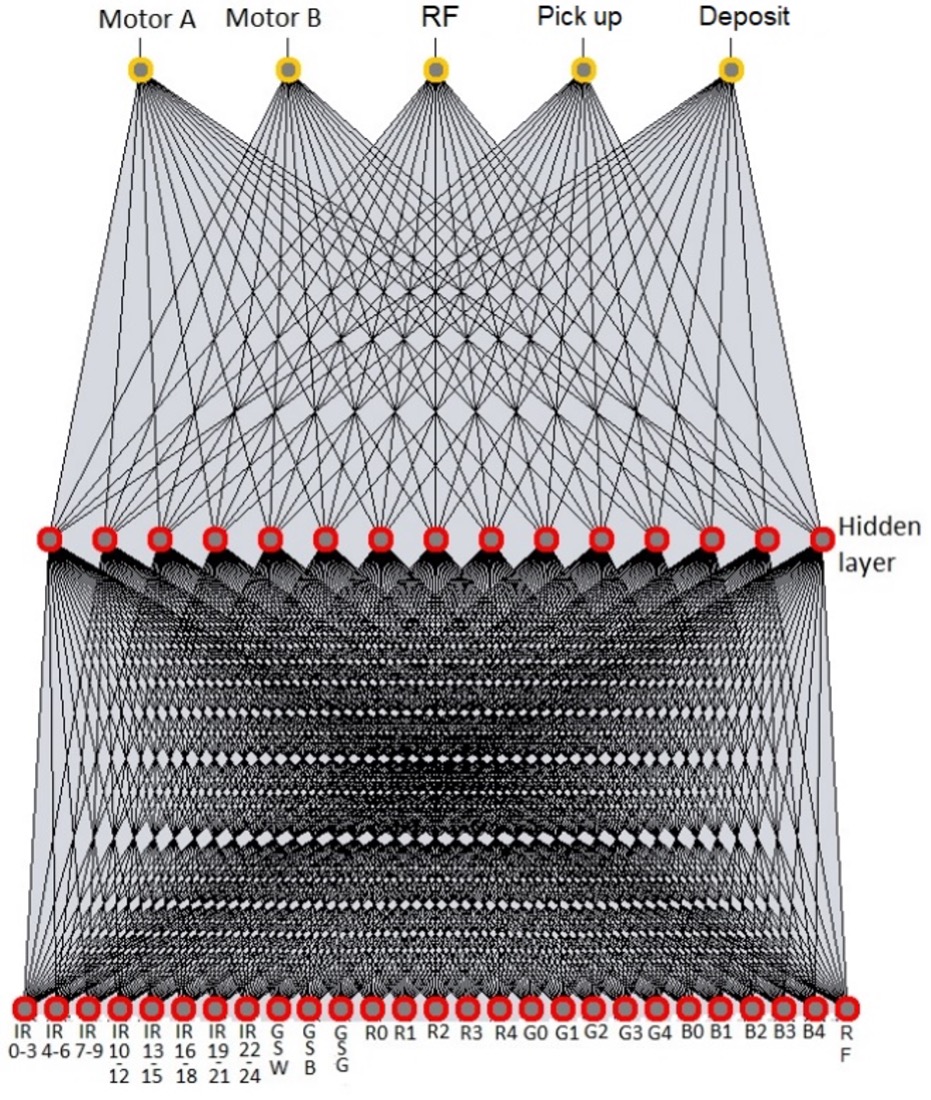
Source: Author’s own elaboration.
Figure 4 ANN for the experimental group with RF communication. A dense feed-forward three-layered network.
As for the fitness function, each robot was awarded a point for every correctly performed collection and deposit operation. That is, if an object was collected from the raw material storage area and then deposited in the manufacturing start zone, the robot earned a point for total fitness. Similarly, in the final production area, collecting and depositing in the storage area also resulted in a point.
Each experimental group was replicated 30 times. The fitness function was used to compare the best individuals of the last generation of each replica. A statistical technique for comparing medians was used for each experimental group (one-way ANOVA for ranges). This was complemented with a post-hoc Studen-Newman-Keuls test.
Results
Because the normality test failed (Shapiro-Wilk, p <0.1), the median was used as a comparative variable in the experiment. Thus, the statistical test indicated significant differences (p <0.01, 29df) in the attitude function of the different experimental groups. The post-hoc test showed that the experimental group with a visual communication channel was statistically different from the other two (p < 0.05, 29df).
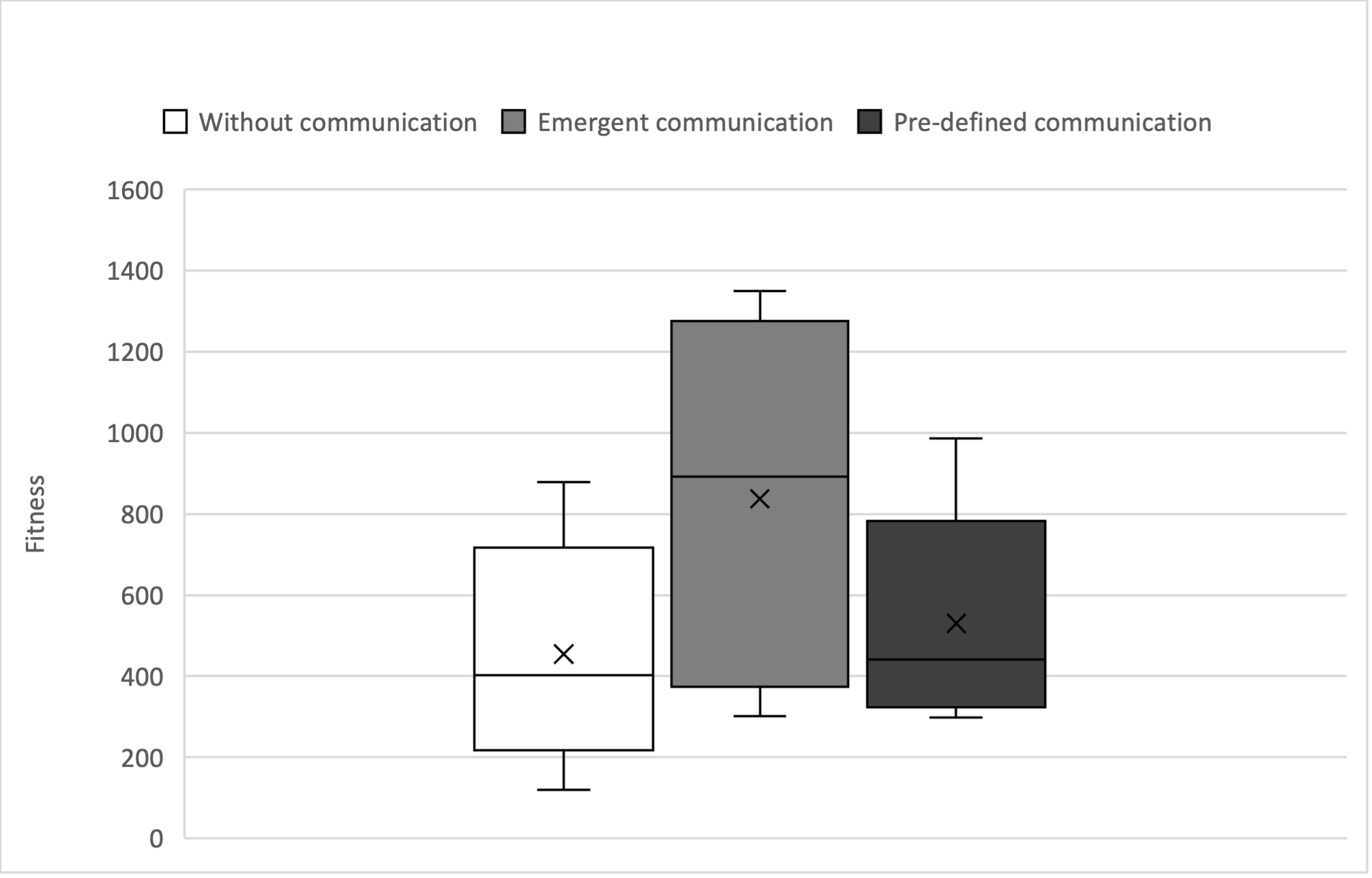
This can be observed in the values of the achieved median fitness (Figure 5). The highest median was recorded for the group with visual communication (892.2), while the lowest fitness was for the group without communication (402.34). As for the RF, the communication group demonstrated an intermediate performance (440.84).
Source: Author’s own elaboration.
Figure 5 Results of the acquired fitness in the experiments for the three experimental groups.
As for the best evolutionary process of each experimental group (30 replications), the best result was obtained by the group with visual communication (1350), followed by the group with RF communication (987), and lastly the group without communication (878.2).
It is important to highlight that visual communication is defined by robots during the optimization process and their interaction (Table 1). Also, RF communication uses two predefined signals. Emergent communication systems are more flexible than predefined communication systems. However, the emergence of signal communication depends on the usefulness of the developed signals as a tool, the complexity of tasks, and the environment. In the case of the group without communication, the absence of these tools proves to be significant. Thus, communication systems improve the performance of robots as a desired complement, but a fully mature communication system is not an essential feature in the emergence of cooperative solutions.
Table 1 Comparison of communication systems.
| Feature | Without Communication | Visual communication
(emergent) |
RF communication (pre-defined) |
| Emitter | Not supported | Ring of LED: Red | Radiofrequency |
| Receiver | Not supported | The red component of a linear camera | Radiofrequency |
| Signals | Not Supported | Emergent and defined by robots during the optimization process. | Pre-defined by programming |
| Signal Flow | N/A | Bidirectional | Bidirectional |
| Activation | Not supported | Each step in the ANN | Each step in the ANN |
| Number of signals | 0 | Defined by robots | 2 |
| Advantages | Coordination emerges through leader following strategies. | Robots define rules for emitting signals and their interpretation (proximal solution). | Reduces the amount of work done by the optimization problem. |
| Disadvantages | Robots solve the task less frequently and with worst performance. | The emergence of signals depends on many variables as the complexity of tasks and environments. | The solution originates from the programmer’s viewpoint (distal solution) and may not be suitable given the task’s context. |
Source: Author’s own elaboration.
Discussion
The adaptation of industrial processes to the concept of Industry 4.0 presents different challenges, most of which are related to the adaptation of technology to increase the level of autonomy. It also represents a platform for the development and incorporation of tools from artificial intelligence (Javaid et al., 2021).
In this context, robots can be tools that accelerate production and reduce personnel risks (Ghadge et al., 2020). However, by increasing the number of robotic components, particularly mobile ones, mechanisms to coordinate tasks become necessary. Without such coordination, processes can become chaotic or inefficient.
In general, coordination is facilitated by communication (Muralidharan & Mostofi, 2021). Emerging communication systems serve as tools enabling robots to coordinate and solve tasks. Coordination results from artificial evolutionary pressures influenced by the environment and robot interactions (Lan et al., 2021). In addition, the emergence of communication systems allows robot groups to contextualize as a society (of artificial entities), determining the necessary number of signals and their meanings (Thomas & Saad, 2023).
This is evident in the experimental group with emerging communication, where fitness is higher, and populations can solve tasks more effectively. Robots were free to produce signals in evolutionary advantageous situations, such as indicating collection or deposit areas with different signals, as seen in foraging tasks (Miletitch et al., 2022), or signaling paths for group members to follow, even marking obstacles.
Althoughcommunication is not the sole means of coordination, it is effective. This is visible in the control group, which had the lowest median fitness among the three experimental groups. Signal exchange fosters cooperative behaviors but is not a prerequisite for their emergence. Robots can develop alternative coordination mechanisms without a tangible information exchange channel. For example, movements can serve as an alternative, as seen with bees (Kohl & Rutschmann, 2021), or formations where individuals collaborate in clusters to complete tasks (Castelló et al., 2021).
Although the fitness level is low in the control group, it does not imply that the robots do not accomplish the task. The explanation is that some evolutionary processes are more successful than others, in such a way that, after several refinements through evolution, the appropriate means of coordination are produced, whereas, in other processes, coordination may well appear and disappear, or simply never emerge.
It is possible to establish that evolutionary robotics is a useful approach to the work of autonomous robots in Industry 4.0 (Feng et al., 2023). This is from the perspective of the cooperative coevolution of robot control systems, considering the group's efficiency and the exchange of information between intelligent objects (Husbands et al., 2021), although the possible participation of other branches of autonomous robotics is not dismissed, including programmed routines that are typical of control robotics.
In the case of the radio frequency group, it represents an evolutionarily distal communication mechanism for the task and the environment presented (Guan et al., 2017). The communication system had a high associated evolutionary cost, linked, for instance, to the distance of signal reception; that is, a reduced range of action allowed coordination to conduct the task. However, the key factor is that the robots did not have the freedom to associate the signals with situations of relevance to the group. This last point makes the communication tool irrelevant, and it was not necessarily used by robots in the evolutionary processes of this experimental group. So, it puts these robots and control group robots in the same circumstances.
Additionally, it must be considered that this is an environment that requires pointing out different situations with a limited number of signals. This generates a situation where the same signal can be emitted in two or more different contexts. This confuses the population regarding the situations indicated.
Based on this, it can be deduced that the preset signal systems limit the situations in which robots can communicate, which is a negative feature in environments with moderate or high dynamism. On the other hand, flexible communication systems, such as evolutionary ones that facilitate the creation of signals and their meaning, are useful tools in highly dynamic environments (Chaabouni et al., 2021). This is because, in the end, individuals establish rules for their use. In the case of evolutionary systems, environmental pressures favor the appearance and disappearance of signals.
Furthermore, an important part of the proposed task is that it exemplifies the active incorporation of autonomous mobile robots into Industry 4.0 environments. To solve the task, different skills coexist to achieve the solution. These include obstacle avoidance, target location, and coordination among group members. Additionally, preprogrammed routines for collecting and depositing objects were included. This approach aims to reduce complexity in the solution space, including the workload of the evolutionary algorithm. Thus, evolutionary pressures are responsible for shaping behaviors that cannot be defined by the base code.
This demonstrates the usefulness of ANN used as a control mechanism for robots in dynamic environments. This kind of tool allows different behaviors that are acquired by the AI structure to coexist. They also allow the use of routines that are not acquired by the robot but are included as a basic knowledge base for the robot. In this way, artificial entities have the capacity for autonomy, given a combination of factors that is regulated by an ANN.
The environment designed for this research includes storage and collection areas, marked with different colors to provide robots with a local reference for their location. This form of localization, used in other tasks within evolutionary robotics, facilitates the emergence of signals in a foraging task (Aldana-Franco et al., 2024). A significant drawback of visual communication is its requirement for proximity between the robots to detect signals. However, simulation results show that robots maintain proximity in leader-following schemes -a common emergent behavior in evolutionary robotics. Although visual mechanisms are prevalent, replacing them with wireless ones -common in Industry 4.0 (Chavan et al., 2021)- is feasible without compromising signal emergence.
The significance of this research lies in integrating evolutionary robotics techniques into dynamic Industry 4.0 environments. These techniques have found applications in industrial settings like control systems for cars used in reverse supply chains (Sathiya et al., 2021) and spatial organization design for swarm robots (Shamout et al., 2022). Emerging communication systems enable cooperative task completion among robots across various fields -a source of inspiration for the proposed solution.
New challenges arise from real environment testing needs and integration of intelligent objects that enhance environmental dynamism and communication system complexity, or human-robot interaction where memory and learning algorithms are essential (López et al., 2022). The potential integration with IoT technology and bulk data utilization for decision-making (Mastos et al., 2020) further underscores the need to explore the applicability of Evolutionary Robotic in complex environments and tasks.
Conclusions
Evolutionary robotics is a technique that can be used within the framework of Industry 4.0 to endow robots with autonomy, particularly for coordinating robot groups and developing communication systems. It is essential to equip them with effective coordination and communication mechanisms, as well as with challenging environments for control systems.
Emerging communication systems enable robot groups to generate communication signals that are interpreted based on the conditions in which they are produced. This contextualization mechanism is adaptable to dynamic industrial systems due to the interaction of various intelligent objects.
The goal of integrating this technology into industrial environments is to reduce operating costs and production times while minimizing occupational hazards for human operators as part of the Industry 4.0 initiative.
An emergent communication system that facilitates supply coordination in industry is introduced in a simulation environment. Here, a neural network-based control system allows robots to produce light-type signals to indicate different areas for collecting or depositing materials. The effectiveness of this communication system is compared against a group of robots without communication capabilities and a group of robots with a non-emergent (predefined signals) communication system. This model can be implemented in industrial environments where robots are tasked with collecting and depositing raw materials and products.
Conflict of interest
The authors declare no conflict of interest.

