











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introduction
Rees (1978) suggested that a time-variability in the ejection of an extragalactic jet would produce shock waves travelling down the jet beam. This idea was pursued by Wilson (1984), who presented gasdynamical simulations of ejections with a periodical variability) and Roberts (1986), who presented a momentum conserving model of a stochastic ejection). Raga et al. (1990) applied variable ejection jet models to outflows from young stars.
In the context of Herbig-Haro (HH) objects, variable jet models have proved to be quite successful, because images obtained with the Hubble Space Telescope (HST) in some cases show that knot chains along HH jets show structures similar to the “internal working surfaces” that result from ejection velocity variability. Comparisons between predictions from numerical simulations of variable jets and observations have proved to be quite successful at least for some HH objects (e.g., HH 211: Völker et al. 1999; HH 111: Masciadri et al. 2002; HH 444: Raga et al. 2010; HH 34: Raga et al. 2012 HH 1: Hansen et al. 2016).
Theoretical work on variable HH jets includes both analytical models (e.g., Raga & Kofman 1992; Smith et al. 1997; Cantó et al. 2000) and numerical simulations (e.g., Stone & Norman 1993; Raga & Biro 1993; Cerqueira & de Gouveia Dal Pino 2001; Hansen et al. 2015); single- and multi-mode periodical ejections (e. g., Raga & Noriega-Crespo 1998; Raga et al. 2015), as well as stochastic ejections (Raga 1992; Yirak et al. 2009, 2012; Bonito et al. 2010a, b; Raga & Noriega-Crespo 2013; Hansen et al. 2015, 2016).
Multi-mode, periodical ejection variabilities and stochastic ejections produce two-shock “internal working surfaces” which travel at different velocities along the jet beam. This results in “knot merging” events, in which a faster working surface catches up with a slower one, and both merge into a single working surface (travelling at an intermediate velocity).
A single-mode sinusoidal ejection velocity variability produces one working surface per ejection period. These successive working surfaces have almost identical time evolutions, so that catching-up events (between successive knots) do not occur. However, it is possible to construct single-mode ejection velocity variabilities which lead to the formation of two or more internal working surfaces per ejection period. These working surfaces do not necessarily have identical time evolutions, so that catching-up events can be produced.
In the present paper, we describe ejection velocity variabilities that lead to the formation of two working surfaces per ejection period. In § 2, we describe the formation of internal working surfaces by a periodic ejection velocity variability, derive criteria for the production of multiple working surfaces per ejection period, and describe possible ways to derive ejection variabilities leading to multiple working surfaces. In § 3, we explore the formation of pairs of internal working surfaces through an ejection velocity variability of the form
2. The formation of multiple working surfaces by a periodic variability
Let us consider a hypersonic, free-streaming jet with a time-dependent ejection velocity
(see equation 4 of Raga et al. 2015). Therefore, the parts of the
where care must be taken to see that the roots actually correspond to minima (rather than maxima) of
For the well studied case of a sinusoidal ejection velocity variability, each period has a single root (see equation [tauc]), and a single working surface is formed per ejection variability period (this problem having a full analytic solution, see Cantó et al. 2000). The successive working surfaces (one per ejection period) are formed at times:
(obtained setting
from the outflow source (see equations 7-8 of Raga et al. 2015).
It is possible to construct functional forms for
Clearly, if
the second working surface will indeed be formed before the fluid parcels ejected at time
Of course, we could have variabilities which do not satisfy condition ([xc2]) but still lead to the formation of working surface pairs. This is due to the fact that at the time
In order to apply this condition, however, one needs to solve the equation of motion for the first working surface (in order to calculate its position at time
We end this discussion by noting that it is possible to construct forms for
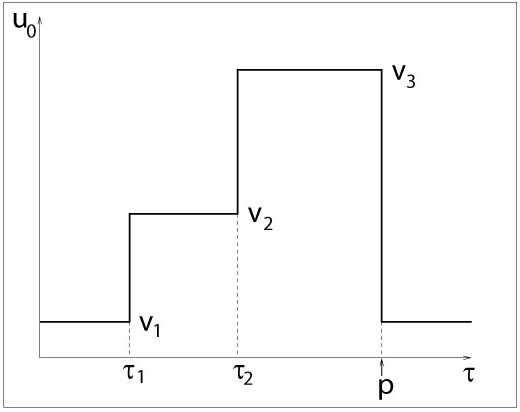
Fig. 1 Schematic diagram of a “double box-car” ejection velocity variability. Within the ejection period
The ejection variability shown in Figure 1 can be used as a model for obtaining continuous forms of
It is of course possible to construct a periodic ejection variability that produces two working surfaces, with the second working surface being slower than the first one. In this case, one would obtain interactions between working surfaces produced in contiguous ejection variability periods. However, by appropriately shifting the starting times of the ejection variability periods, the problem can be converted into the “slow first working surface/fast second working surface” case described above.
3. Odd powers of a sine wave
3.1 General considerations
We consider an ejection velocity variability of the form:
where
In Figure 2, we show the first period of
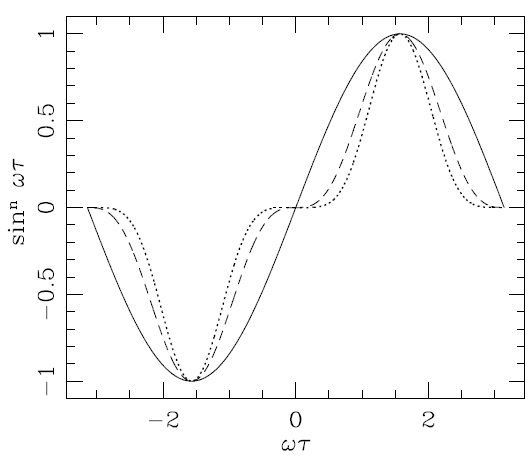
Fig. 2 This graph shows a single period of the functions
We calculate the ejection times
for
for
3.2 The
Equation ([tc1]) has a single root
in the
The values of
The relevance of the
3.3 The case with n ≥3
Solving equation ([tc]) requires finding the roots of a polynomial of order
In the
Now, for non-zero (but small)
with
where
Finally, combining equations ([stcn0]), ([h]) and ([hs2]) we obtain the roots of equation ([tc]):
valid for small velocity amplitude to mean velocity ratios
3.4 Initial positions of the working surfaces
The two roots of equation (9), with the small
calculated with the negative and positive values of
The first working surface produced by an ejection variability period (see Figure 2 and equation [7]) corresponds to the negative value of
In the following section, we present numerical solutions of Burgers’ equation showing the formation of working surface pairs, and the later mergers between them.
4. Numerical solutions for the n= 3 case
In order to illustrate the characteristics of a jet with “double working surfaces”, we have obtained a numerical solution of Burgers’ equation:
subject to an inflow condition
at
Burgers’ equation corresponds to a pressure-less flow, and has discontinuities that correspond to two-shock working surfaces in the Euler equations. The equation of motion of the discontinuities of Burgers’ equation corresponds to a ram-pressure balance working surface in a constant density flow (see, e.g., Raga et al. 1990 and Raga & Kofman 1992), and therefore generally does not agree with the motion of a working surface modeled with the gas-dynamic (Euler) equations. However, solutions of Burgers’ equation do illustrate the general properties of the corresponding gasdynamic problems (in the case of hypersonic flows).
We first use equations (16) and (17) to obtain estimates for the distances from the source at which the working surfaces are formed. With the parameters of the chosen ejection velocity variability (see equation [infl]), we obtain a position
The velocity structure resulting from the numerical simulations is shown in Figure 3 for different integration times. It is clear that two discontinuities (corresponding to internal working surfaces) are formed per ejection period. In the
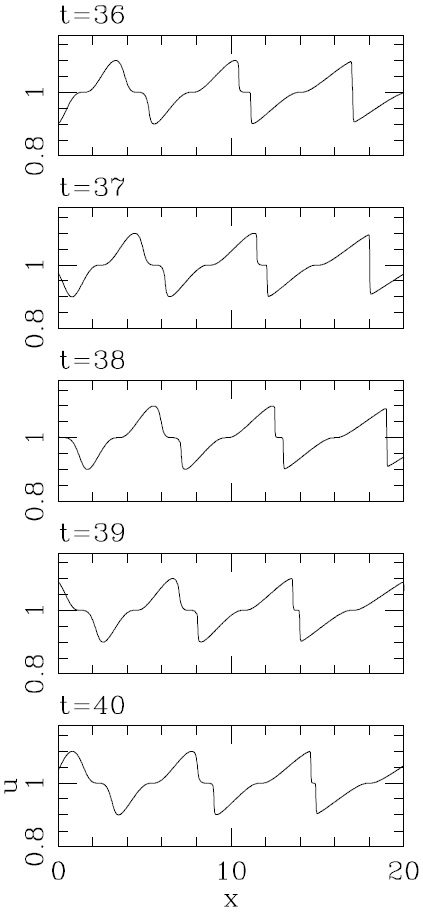
Fig. 3 This graph shows the velocity vs. position obtained at different times from a numerical solution of Burgers’s equation with an ejection velocity (at
In the
5. Summary
We have explored the possible formation of multiple working surfaces in jets per ejection period of a periodic ejection velocity variability. Given the functional form of a proposed ejection velocity variability, it is clear that it produces double working surfaces if it has two roots of equation (2) which satisfy the criterion of equation (5). The ejection variability will also produce double working surfaces (per ejection period) if the roots satisfy the less stringent criterion of equation (6), but this criterion is of less straightforward application because it requires solving the equation of motion for the faster working surface (see § 2).
We have then studied a variability of the form
This “small
We finally presented a numerical solution of Burgers’s equation for a one-dimensional flow with an ejection velocity variability of the form
In this numerical example, the two working surfaces that were produced have different velocities, and therefore the faster working surface catches up with the slower working surface as they travel away from the source. The position at which this catching up process occurred was approximately twice the distance from the source at which the working surfaces were formed. At larger distances from the source, one has single working surfaces (produced through the merger of the double working surfaces resulting from the ejection) per ejection velocity variability period.
This characteristic is a general feature of double working surfaces produced by periodic ejection variabilities: they only remain double working surfaces for a certain time, and eventually merge into one, as the faster working surfaces catch up with the slower ones. Therefore, one would expect to see a qualitative difference between the knot structures at larger distances from the source (where we see merged knots) and close to the point of working surface formation (where we see the double working surfaces). Such an effect has been described by Raga & Noriega-Crespo (2013) for the HH 34 jet, but no comparable studies exist for other HH objects.
Because of this lack of clear application, our present work should be regarded as a mathematical curiosity relating to the formation of shock structures in periodically variable jets. The method which we have described for evaluating the possible formation of double working surfaces (per ejection period) might be useful for choosing appropriate forms for an ejection velocity when trying to simulate specific HH jets.
An interesting question is whether or not the analytic approach used in this paper is applicable to the case of magnetized jets. The criterion for working surface formation (see § 2) is valid for a ballistic flow. In the case of a magnetized jet, a ballistic regime is obtained if the flow is hypersonic and also “hyperalfvénic” (i.e., with a jet velocity much larger than the Alfvén velocity). Therefore, under these conditions the analysis presented above should also be valid. However, implicit in the discussion of the subsequent evolution of the working surfaces (involving “catching up” events) is the assumption that they have a small spatial extent along the outflow axis (i.e., that the two shocks in the working surfaces have relatively small separations). This is not necessarily the case for magnetized jets, which (depending on the radial configuration of the magnetic field) can have internal working surfaces with substantial axial extents (see, e.g., De Colle et al. 2008 and Hansen et al. 2015). If this axial stretching is large enough, it can also lead to mergings between successive working surfaces. This effect (which is nicely illustrated in Figure 2 of Hansen et al. 2015 for the case of axisymmetric, magnetized jets) was studied (for the case of 1D, non-magnetized flows, which also develop axially extended working surfaces) by Smith et al. (1997). Clearly, variable jets with axially extended, double working surfaces (which could be obtained with one of the ejection variabilities discussed above, together with an appropriate magnetic field configuration) will have a richness of behaviour not appropriately described by the simple, “catching up” description which we have used in the present paper.

