











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1.Introduction
The nonlinear evolution equations have played a fundamental role in the field of mathematical physics and many other areas of applied science. As an instance, in signal processing, dusty plasma, fluid dynamics, nonlinear optics, quantum mechanics, biology, and so forth (1)-(6). Examining the exact solutions of these nonlinear models help us to understand the mechanism, application and gives better knowledge of the model. With the virtue of these solutions, a better vision can be captured into the physical feature of the considered model. In recent years, series of methods have been developed to obtain the exact and approximate solutions of the nonlinear evolution equations in mathematical physics, as an instance, the Jacobi elliptic function method 7, Adomian decomposition method 8, sine-cosine method 9,10, first integral method 11,12, variational iteration method 13,14, extended tanh method 15,16, q-homotopy analysis method 17-19, exp-function method20-22, q-homotopy analysis transform method 23-25, tanh-sech method 26,27, homotopy perturbation method (28), (G´/G)-expansion method 29,30, fractional reduced differential transform method 31,32, homogeneous balance method 33,34, inverse scattering method 35, iterative shehu transform method 36, homotopy analysis method 37,38, Jacobi elliptic expansion method 39,40, residual power series method 41-43, perturbation-iteration algorithm 44,45, modified Kudryashov method (46), new extended direct algebraic method 47, Sardar sub-equation method 48, Sine-cosine and sinh-cosh techniques 49, simple equation method 50 and so on.
The (3+ 1) -dimensional Zakharov-Kuznetsov (ZK) equation which comprises of the nonlinear term “PP x ”and third-order dispersion term “P xxx ” is restricted to the waves of small amplitudes only is presented by
where P represents electrostatic potential, the physical quantities
A, B and C are constants.
Seadawy et al. 51,52 and Zhen et al. 53 have outlined these physical quantities. The
width of the soliton and its velocity deviate from the predictions of this equation
when the amplitude of the wave increases. As a result, an additional fifth-order
dispersion term which is a higher-order dispersion term,
In this present study, our objective is to further complement the previous studies
conducted on the perturbed (3+1)-dimensional ZK equation by introducing the more
general form by replacing the nonlinear term “PP
x” with
where k is a positive number, γ is the fractional-order and
The rest of the paper is organized as follows: Section 2 gives a brief discussion of conformable derivatives which includes the definitions, basic properties, lemmas, and theorems. Section 3 presents the general idea of the sub-equation method. In 4, the application of sub-equation to time-fractional perturbed (3+1)-dimensional ZK equation of conformable type is demonstrated. In 5, the graphical representation of some solutions is depicted in 3D for different fractional orders. Finally, 6 gives the conclusion.
2.Preliminaries
This section contains a brief discussion of conformable derivatives, which includes the definitions, basic properties, lemmas, and theorems. Most of the concepts presented in this section have been introduced in 59,60
Definition 2.1. Let
Furthermore, If P is γ-differentiable in some interval
Lemma 2.2.59Let
Lemma 2.3.59Let P be a differentiable and γ-differentiable function. Then
Theorem 2.4.61,62Let
3.Algorithm of the proposed method
The main concept of the sub-equation method 63,64 for solving FPDEs is presented below:
Here,
Step. 1: Let
Step 2: We suppose that (9) has the solution:
where p,q,r,s and
where σ is a constant and the solutions are given as
Step 3: Substituting Eqs. (10) and (11) into Eq.(9), we have some
polynomial in
Step 4: Finally, by solving the equations found in Step 3. Then, substitute these constants p,q,r,s,σ and ej into Eq.(10) in addition to Eq. (12), we conclude the desirable solutions for Eq. (8) immediately.
4.Sub-Equation Method to PZK Equations of Comformable Type
Here, the application of the sub-equation method to the time-fractional perturbed (3 + 1) -dimensional ZK equation of conformable type is presented. Consider
Application of chain rule on
Balance principle to the terms
4.1.Solutions for k = 1:
For k = 1, we have N = 4, then Eq.(10) gives
By substituting Eqs. (11) and (15) into Eq.(14), then equating the coefficients
of
With the aid of Mathematica, we solve the above equations as
Case 1.
By substituting Eq.(17) into Eq.(15) with solutions defined in Eq.(12), we have the required solutions of Eq.(13) as:
where
Case 2.
The required solutions for Eq.(13) are
where
Case 3.
The required solutions for Eq.(13) are
where
4.2.Solutions for k= 2:
When k = 2 we have N = 2 then Eq.(10) gives
By substituting Eqs. (20) and (11) into (14), then equating the coefficients of ECUACION to zero yields
With the help of Mathematica, we solve the above equations as
Case 1.
By substituting Eq.(22) into Eq.(20) and using the solutions defined in Eq.(12), we obtain the required solutions to Eq.(13) as:
where
Case 2.
By substituting Eq.(23) into Eq.(20) and using the solutions defined in Eq.(12), we obtain the required solutions to Eq.(13) as:
where
4.3.Solutions for k= 4:
When k = 4 we have N = 1, then Eq.(10) yields
By substituting Eqs. (24) and (11) into Eq.(14), then equating the coefficients
of
By utilizing Mathematica, we solve the above equations as
Case 1:
By substituting Eq.(26) into Eq.(24) and using the solutions defined in Eq.(12), we obtain the required solutions to Eq.(13) as:
Case 2:
By substituting Eq.(27) into Eq.(24) and using the solutions defined in Eq.(12), we obtain the required solutions to Eq.(13) as:
5.Graphical representation of some solutions
The absolute behavior in 3D plots with integer and fractional order respectively
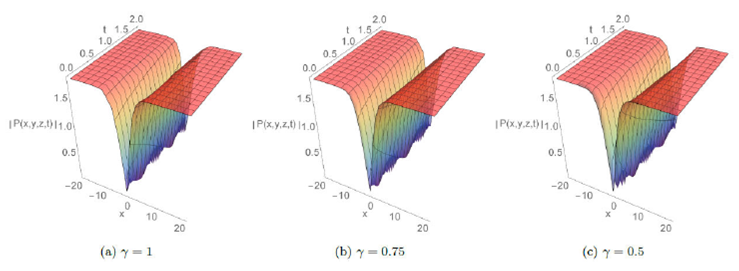
Figure 1 The plots of P1 solution for A = 1; B = 2; C = -20; y = z = 2; E = 0:5; σ = -1; e0 = 0:5; p = 0:2 and q = 0:2:
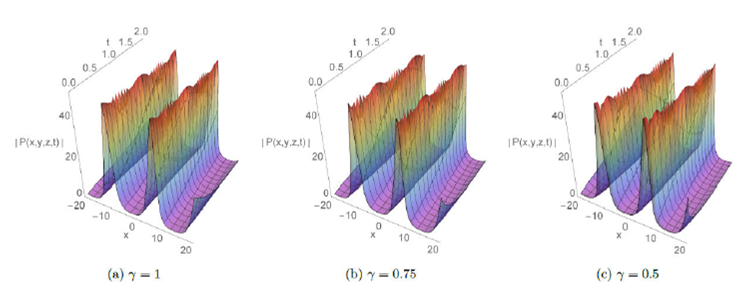
Figure 2 The plots of P3 solution for A = 1; B = 2; C = -20; y = z = 2; E = 0:5; – = 1; e0 = 0:5; p = 0:2 and q = 0:2:
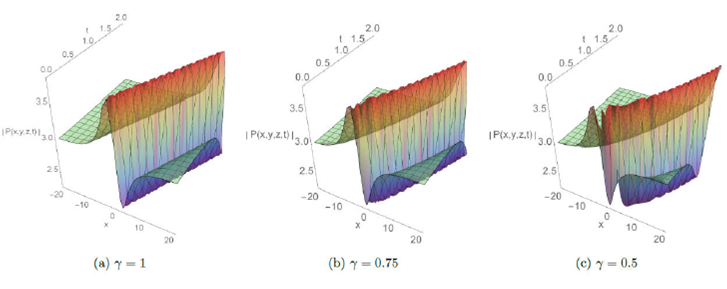
Figure 3 The plots of P20 solution for A = 1; B = 2; C = -1; y = z = 2; E = 0:5; φ = 1; e0 = 3; p = 0:2 and q = 0:2:
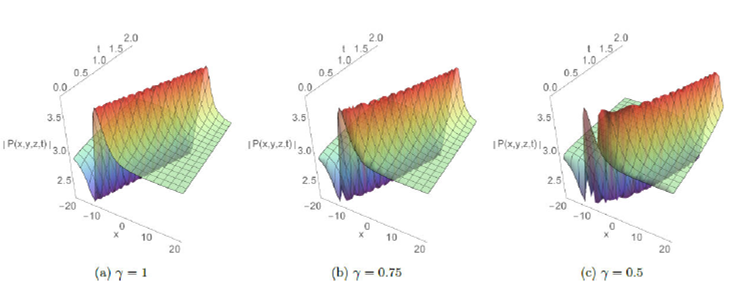
Figure 4 The plots of P25 solution for A = 1; B = 2; C = -1; y = z = 2; E = 0:5; φ = 1; e0 = 3; p = 0:2 and q = 0:2:
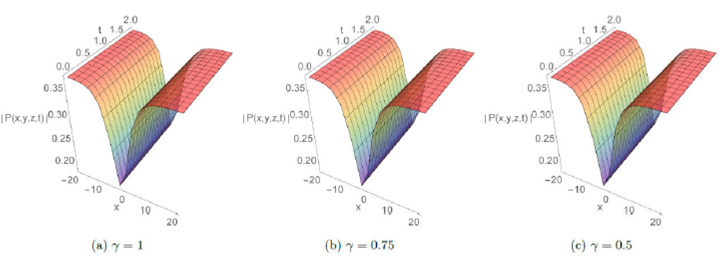
Figure 5 The plots of P26 solution for A = 1; B = 2; C = 10; y = z = 2; E = 0:1; σ = -1; e0 = 3; p = 0:2 and q = 0:2:
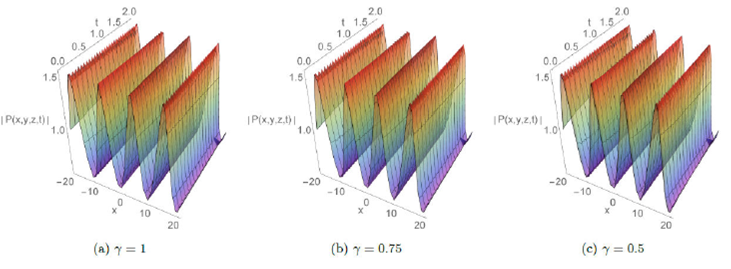
Figure 6 The plots of P28 solution for A = 1; B = 2; C = 10; y = z = 2; E = 0:8; σ = 1; e0 = 3; p = 0:3 and q = 0:3:
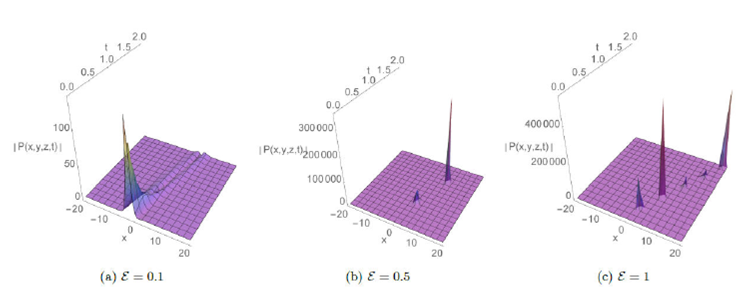
Figure 7 The effect of the parameter E on solution profile of P11 for γ = 1; A = 1; B = 2; C = 10; y = z = 2; σ = -1; e0 = 3; p = 0:5 and q = 0:5:

6.Conclusion
In this paper, we introduced the generalized time-fractional perturbed (3+1)
Zakharov-Kuznetsov (PZK) equations which describe the nonlinear dust-ion-acoustic
waves in the magnetized two-ion-temperature dusty plasmas. We investigate the exact
solutions by the use the of sub-equation method in the conformable sense. The use of
conformable derivative in this study gives flexibility when applying to the proposed
model and satisfies the power rule, product rule, quotient rule, integration by
parts, chain rule, linearity, and the derivatives with constant is zero. The newly
obtained solutions by the proposed method are, respectively, the dark soliton
multi-soliton, kink-shape, solitary wave, periodic and bell-shaped soliton solutions
that are significant in the field of mathematical physics. Graphical representation
(see Fig. 1 to 8) of obtained solutions are plotted in 3D for particular values of
parameters. Figures 7 and 8, demonstrate the effect of adding a higher-order dispersion
term

