











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introduction
These days optimum utilization of energy and reliability is becoming an uttermost parameter to design and to develop any innovative work. The rapid advancement in research has been a great motivation for researchers and scientists to modernize their work and to evolve new ideas and concepts. Active magnetic bearing (AMB) is from one of those new ideas with many advantages over the conventional bearing and Permanent Magnetic Bearing (PMB) (Schweitzer & Maslen, 2009).
Although the fundamental principle of AMB is levitation (Schweitzer, 2005) means hovering of an object made of a ferromagnetic material such that it counterbalances gravity acting on it and that counterbalancing force will be provided by the magnet, either it is electromagnet (active magnet) or, permanent magnet (Bassani 2006). Permanent magnetic bearing (PMB) and active magnetic bearing are the two main categories of magnetic bearing based on the type of magnet utilized. In PMB, the magnet used is a permanent magnet whose magnetic strength depends on the material used (Bachovchin et al., 2013). However, with active magnetic bearings, the magnet is really an electromagnet whose magnetic force can be adjusted by restricting the amount of current passing through the coils. This adds up a great advantage, to use electromagnets (active magnets) in magnetic bearing rather than a permanent magnet, like, prolonged use of permanent magnets in magnetic bearing causes a reduction in the attractive power of permanent magnets that leads to rough and unstable bearing operation, but using a suitable controller with AMB, a stable bearing operation is possible (Bachovchin et al., Post 2012).
AMB comprises an electromagnet actuator that is made of iron with copper windings around it, and that may be in shape of ‘U’, ‘I’ etc. (Mushi et al., 2012). The rotating object is of ferromagnetic material separated by a little airgap from the electromagnet, as shown in Figure 1. Calculating the force that the electromagnet exerts on a given rotor depends on the number of copper winding turns, the current flowing through the winding, the size of the core, and the air space between them (Schweitzer & Maslen, 2009).

In this day and age of modernization, conventional equipment and devices are now replacing by the modern and efficient one and to get better performance in high-speed industrial machinery, robust environment used space machinery etc. are replacing conventional bearing from AMBs (Schweitzer et al.,1994). AMBs are widely using in fast turbo compressor (Mushi et al., 2012), flywheel energy storage system (Bai et al., 2012), artificial geographical satellites (Bangcheng et al., 2011), artificial medical equipment (Hoshi et al., 2006) and so on.
Controlling of nonlinear system is a prominent area of research as most of the practical system are inherently nonlinear and unstable. AMB system is one of those nonlinear system which needs a robust and efficient controller for a stable and effective performance. Various articles and research have been proposed for controlling of an AMB system, some of them are based on conventional controlling methods, like, Qing-Guo Wang et al. (1999) developed a method based on controlling of a second-order closed loop system with a pole allocation strategy to tune PID controller. In 2005, Polajzer et al. proposed a cascade connected PI and PD position controllers for decentralized control of an AMB system (Polajžer et al., 2006). Later, Imari and Yamamoto (2012) proposed a newly PID control method for nonlinear system which studied by Anantachaisilp & Lin (2013) for PID tuning of AMB system. Apart from conventional controllers, fuzzy logic-based intelligent controllers have shown to be highly successful at controlling nonlinear systems (such as AMB) as Hung (1995) in his work used a fuzzy logic to control magnetic bearing. Later, Hong & Langari, (2000) proposed a robust fuzzy control for AMB system to overcome the harmonic disturbances issue (Hong & Langari, 2000) and Du et al. (2010) developed a robust Takagi-Sugeno model based fuzzy control to stabilize the AMB with fast response speed subject to control-voltage saturation (Du et al., 2010). Further, Zhang et al. (2014) presented a fuzzy PID control logic with adjustable membership function and Raj and Mohan (2020) proposed a fuzzy PID controller with multiple fuzzy sets. Proper designing and implementation of intelligent controller can result in an improved performance of AMB system as compared to conventional controllers. This improvement in the performance is needed to be observed and analysed. Therefore, in this work, for the proposed AMB system (when inner closed loop is unity) first, a conventional PID, a PD-fuzzy logic controller and a PID-FLC is designed and then their performance is observed. Later, these designed controllers are implemented with the complete proposed AMB system and their capability to handle system instabilities are analysed and their performances are compared.
The next portion of the study discusses the dynamical modelling of the proposed active magnetic bearing (AMB) system. The controllers' design is the main topic of Section 3. Section 4 presents all the simulations that have been conducted in MATLAB 2015b for the verification of the designed controllers with proposed system and performance comparison among them. Section 5 consists of concluding remarks.
2. Dynamical modelling of proposed closed loop active magnetic bearing (AMB) system
In Active magnetic bearing, there is no friction between the actuator and rotor and this advantage makes AMB reach at a very high speed allowed by the tear and strain of the material from which it is designed. Irrespective of the environment and location AMB performance is always better than the conventional bearing (Schweitzer & Maslen, 2009). For the proposed AMB system as shown in Figure 2. For proper and reliable bearing operation two controllers are required. One controller is in inner closed loop to control the current going to coil of the electromagnet before power amplifier and second to control position of the rotor by comparing its actual position with the reference position.

The inner closed loop of Figure 2 has a current controller which is a PI controller (Yordanova, 2009) for increase the response of current controlled inner closed loop (He et al., 2020). For power amplifier (Jiang et al., 2020), various research has been carried out and depending upon the objective of the applications power amplifier (Debnath et al., 2018) get modified. The output of the position controller compares the signal that the current sensor produces based on the amount of current flowing through the electromagnet coils. The inner closed loop acts faster (i.e., inner closed loop requires enough current loop bandwidth) as compared to the outer loop (He et al., 2020).
The outer loop is for controlling the position of rotor (suspending object) and this loop has position sensor, position controller and AMB system. The most practical step before developing and implementing the controller for the proposed AMB system is to dynamic modelling of the system (Debnath & Biswas, 2020). The model is solely used for dynamic analysis and to comprehend the system's nonlinear performance. Figure 3 depicts a simplified form of a single magnet active magnetic bearing. Here a ‘U’ shaped actuator is used with a disk shaped rotor having a mass m (Debnath & Biswas, 2021b). The air gap is denoted as x and the current in the coils of magnet is represented as i. The magnet's produced force F is a function of the air gap (x), and the current in the magnet coils (i).

A. Mechanical dynamics modelling of the system
In terms of air gap, mechanical dynamics are
Here, force
B. Magnetic force modelling of the system
Rotor and stator are made of iron having permeability many times greater than the of air. The reluctance is,
where,
Magnetic flux in terms of magneto motive force and effective reluctance,
therefore, flux linkage is,
magnetic co-energy is,
the connection between magnetic force and magnetic co-energy,
using Eq. 4 and Eq. 5, the electromagnetic force is,
negative sign shows that the force applied by magnet is counteracting gravity on the rotor. So as magnetic force increases the rotor moves closer to the magnet.
Using Taylor’s series expansion, Eq. 7 is linearized (Hurley & Wolfle, 1997) at an equilibrium point
Eq. 8 shows the linearized AMB system transfer function relating coil in the current I(s) and air gap X(s). where
Using Eq. 8 and plant parameters shown in Table 1, for equilibrium point of operation a transfer function is calculated as:
3. Designing of controllers
3.1. Designing of PID controller
This section is focused on designing a PID as a position controller for the AMB system. The switching frequency of inner closed loop is very high as compared to the outer closed loop (He et al., 2020). So, as an assumption, for designing the controller for outer loop (i.e., position controller), the inner loop is considered as unity gain. But for verification, the complete AMB system is observed with the designed controller and the impact of the inner loop on overall performance is studied.

The PID controller transfer function K(s),
where
where K x = feedback path gain or, position sensor gain. For frequency response analysis (Katebi, 1988) the open loop transfer function after putting s = jω will be,
therefore,
where,
at gain crossover frequency the magnitude of the open loop system is,
so,
Therefore,
by using Eq. 13, Eq. 15, Eq. 16, x and y the calculated value of
3.2. Designing of fuzzy logic controller (FLC)
Control of complex and uncertain systems was a major challenge until the introduction of fuzzy sets (Zadeh, 1988) and fuzzy control. These fuzzy sets along ‘with if-and-then’ statements, create an algorithm to control complicated systems. These if-and-then statements formed using qualitative process knowledge and human-like thinking (Zadeh, 1990). A block diagram representation of FLC is depicted in Figure 5.

Steps in designing fuzzy logic control technique are- Fuzzification, Inference and Defuzzification (Cox, 1992; Das & Biswas, 2021; Shieh, 2014). Each step has its own significance which is briefly described and a two-dimensional FLC will be designed for the proposed AMB system.
A. Fuzzification
The first step after collecting all analogue data and crisp data is to transform it into the membership function of fuzzy subsets or, fuzzy sets. That it will be understandable by the inference system (Sain et al., 2020). Here, triangular type membership function converts the crisp data into fuzzy sets and subsets. Figure 6 shows a triangular membership function, and its mathematical description is given by Eq. 18.

Here
In this work the fuzzy controller employs two inputs: the error signal

These two inputs, error signal
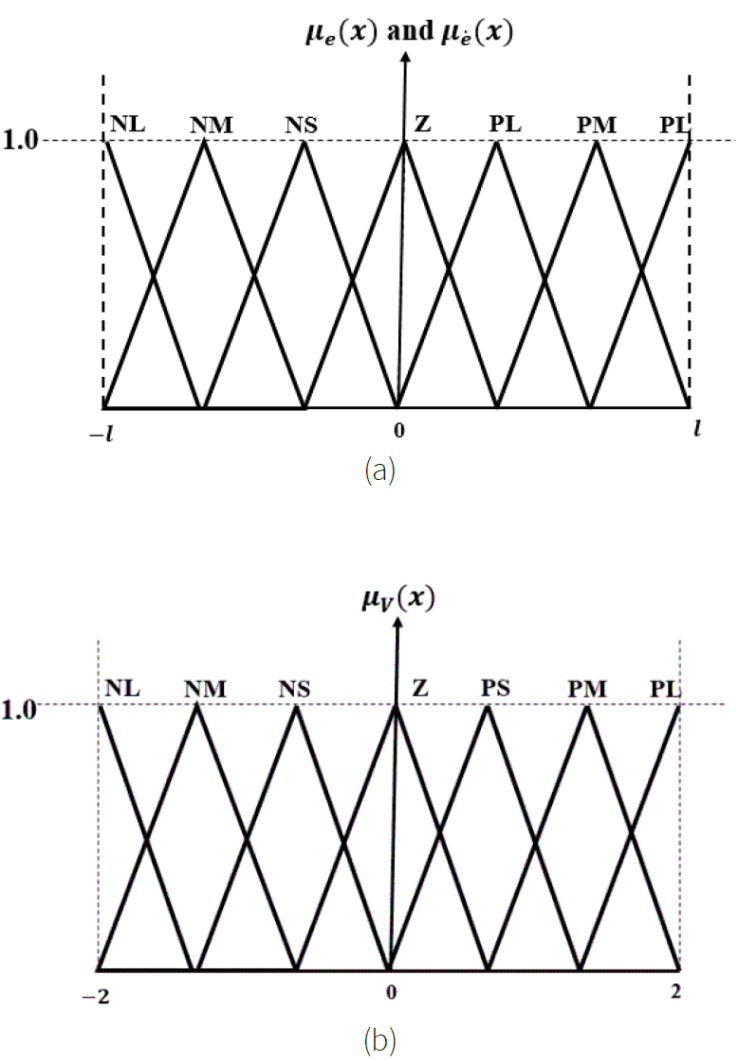
Figure 8 (a) Fuzzified inputs with seven triangular type membership function, (b) Fuzzified output with seven triangular type membership function.
Mathematically,
Table 2 Range of input membership functions.
| Sl. No. | Membership functions of error signal | Membership functions of change in error signal | Range |
|---|---|---|---|
| 1. |
|
|
[-1, -0.6665] |
| 2. |
|
|
[-1, -0.3334] |
| 3. |
|
|
[-0.6665,0] |
| 4. |
|
|
[-0.3334, 0.3334] |
| 5. |
|
|
[0,0.6665] |
| 6. |
|
|
[0.3334,1] |
| 7. |
|
|
[0.6665,1] |
Table 3 Range of output membership function.
| Sl. No. | Membership functions of voltage signal | Range |
|---|---|---|
| 1. |
|
[-2, -1.3334] |
| 2. |
|
[-2, -0.6668] |
| 3. |
|
[-1.3334,0] |
| 4. |
|
[-0.6668, 0.6668] |
| 5. |
|
[0,1.3334] |
| 6. |
|
[0.6668,2] |
| 7. |
|
[1.3334,2] |
Later, depending upon the rule base, operation is performed on fuzzified inputs and output in the inference engine.
B. Inference and rule base
Fuzzy inference is the process of creating a map utilizing fuzzy logic from a given input to an output. Mapping then provides a basis for judgement and trend detection. Rule base describes the mapped relation between fuzzified inputs and output. In this work, if-and-then rule is designed using two different inputs and one output, with seven membership function each, i.e.,
Table 4 Rule base.

|
PL | PM | PS | Z | NS | NM | NL |
| NL | Z | NS | NM | NL | NL | NL | NL |
| NM | PS | Z | NS | NM | NL | NL | NL |
| NS | PM | PS | Z | NS | NM | NL | NL |
| Z | PL | PM | PS | Z | NS | NM | NL |
| PS | PL | PL | PM | PS | Z | NS | NM |
| PM | PL | PL | PL | PM | PS | Z | NS |
| PL | PL | PL | PL | PL | PM | PS | Z |
With reference to Table 4, all the rules can be stated in form of- “IF error is PL (positive large) AND change in error is NM (negative medium) THEN voltage is PS (positive small)”. In terms of membership functions, it can be rewritten as- “IF error is
Similarly, all the 49 rules are created in rule base editor of fuzzy tool of MATLAB. Depending upon these rules the inference engine executes the process and generates output accordingly (Li & Gatland, 1996). The output is further defuzzified (i.e., conversion of fuzzified data into raw data or crisp data) to make the output data understandable.
C. Defuzzification
There are more than seven methods are available for defuzzification purpose. All have their significances and advantages. But among them the most useful method is centroid method or, center of area method (Mohan & Sinha, 2008). Based on the center of gravity of the fuzzy set, this technique delivers an exact value. It can be defined by the algebraic expression, (Eq. 19). Pictorial representation of centroid method of defuzzification is shown in Figure 9.
where, x *= defuzzified value of x

3.2.1. Designing of proportional integral derivative-fuzzy logic controller (PID-FLC)
The designed FLC, shown in Figure 7 is a PD-FLC which can be modified to perform as a PID -FLC (Arun & Mohan 2018; Lai & Lin, 2003). Implementing an integrator to the output of PD-FLC and taking a summation of output of the integrator with output of PD-FLC becomes a PID-FLC (Li, 1997) as shown in Figure 10.

The designed PID-FLC is used as a position controller for the proposed AMB system, its performance is observed and compared with PD-FLC and PID controller. In the next section, different controllers will be simulated with the proposed AMB system, and their effect and performance are observed.
4. Simulation, results, and discussion
4.1. Simulation of proposed active magnetic bearing (AMB) system with PID controller
For different parts of PID controller resistor and capacitor values are calculated as:
For proportional part of PID controller when K p =4.3,
let,
for integral part of PID controller when K i =184.2,
let, C i = 1 x 10-6 F
for derivative part of PID controller when K d =0.052,
let, C i1 = 1 x 10-6 F
using these values of

Figure 12 shows the input, which is a pulse of unit step signal for three cycles and output of each part of PID controller. (i.e., proportional, integral, and derivative respectively).

In this study, transfer function (Eq. 9) is used for all observation and computation. With reference to Figure 4, when the inner closed loop is set to unity, the proposed AMB system is simulated with a PID controller, as illustrated in Figure 13.

A unit step signal is provided as input to the system, allowing observers to examine how the closed loop performs in transient state.
Observed transient state parameters are listed in Table 8, where percentage overshoot is 18.452% which is in a stable region at the peak time is 0.066 sec, rise time is 0.02468 sec and settling time is 0.14287 sec. Calculated damping ratio
Next, the complete proposed AMB system, as depicted in Figure 2, is simulated. Here, the current controller is a Proportional-Integral (PI) (He et al., 2020), and a single switch power amplifier (Debnath et al., 2020) is intimated for the inner closed loop. The designed PID controller is implemented as a position controller. The simulation layout of the complete AMB system is shown in Figure 14, and for a unit step signal, step response has been plotted and transient state parameters have been observed which are listed in Table 8.

Transient response of complete proposed AMB system is studied which has a peak overshoot of 22.84% at a peak time of 0.070 sec, rise time is 0.02637 sec, settling time is 0.14164 sec and calculated damping ratio
To compare the transient state performances of both forms of the closed loop with the designed PID controller, step responses are plotted on an X-Y axis as shown in Figure 15. It is evident from the step plots of Figure 15 that the designed PID controller when implemented with the complete proposed AMB system shows a rise in overshoot, rise time and peak time. This change in transient state parameters (which is listed in Table 5) is due to the presence of an inner closed loop. Although, the designed PID controller is still able to maintain the system in underdamped region (0 < ξ < 1).

Table 5 Change in transient state parameters with PID controller.
| Transient state parameters | Change in value |
|---|---|
| Percentage Overshoot | +23.78% |
| Peak Time | +6.060% |
| Damping Ratio (ξ) | -10.00% |
| Rise Time | +6.875% |
| Settling Time | -0.860% |
Using the designed PID controller with complete proposed AMB system the percentage overshot increased by 23.78% and damping ratio reduced by 10%. There is a little decrement in the settling time which means that the complete proposed AMB system with PID controller settles fast as compared to proposed AMB system with PID controller (when inner closed loop is unity).
4.2. Simulation of proposed active magnetic bearing (AMB) system with PD-FLC
Fuzzy logic controller (FLC) is designed for the proposed system using fuzzy toolbox application of MATLAB (The MathWorks, 1998). For creating a fuzzy rule base, the first crisp data input and output has been defined in a form of membership function as shown in Figure 16 (a) and (b). Later this fuzzified data is processed to an inference engine and depending upon the designed rules output is generated which is defuzzified into crisp data form.
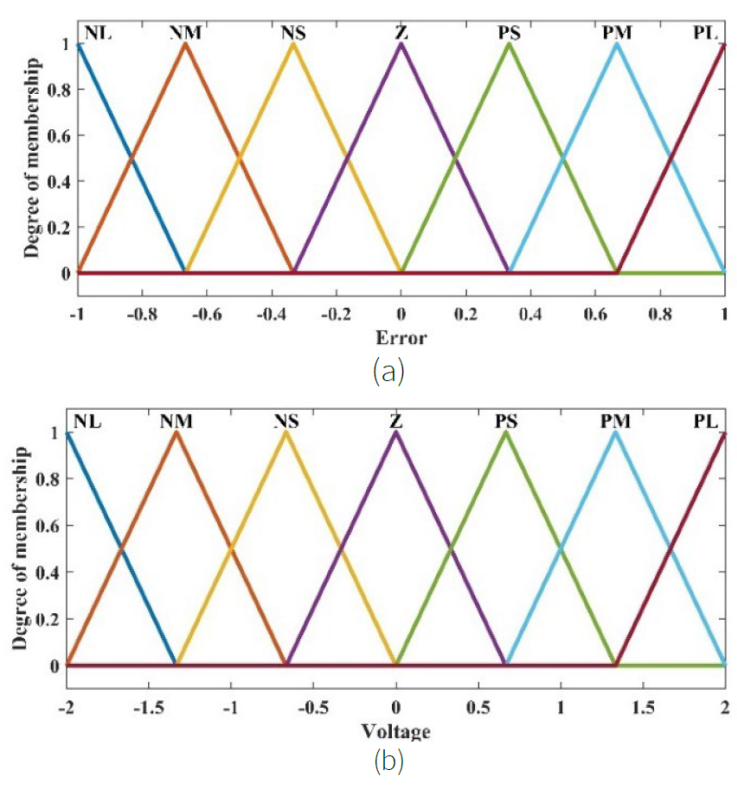
Figure 16 (a) Fuzzified inputs and (b) Fuzzified output with seven triangular type membership function.
In this paper, fuzzy inference system (FIS) is of Mamdani type (Aceves-López & Aguilar-Martin, 2006) and rule base editor creates all of the 49 rules which has been described in subsection 3.2. A three-dimensional plot of rule base is shown in Figure 17 where on X-axis error signal is labelled, change in error signal is labelled on Y-axis and output is laid out on Z-axis, to their respective range.

As illustrated in Figure 18, the created fuzzy logic controller is also employed as a position controller with the proposed AMB system.

When PD-FLC is a position controller for the proposed AMB system (when inner closed loop is unity) shows a peak overshoot of 8.152% which is 10.3 unit less than PID controlled. With the implementation of PD-FLC as a position controller, rise time, peak time and settling time of the closed loop reduce to 19.327%, 30.30% and 34.457% respectively (compared to PID controller).
Referring to Figure 2, the complete proposed AMB system is simulated in MATLAB with PD-FLC as a position controller as shown in Figure 19.

Comparing the data obtained for PD-FLC with complete proposed AMB system, with PID controller, shows a reduction of 58.96% in peak overshoot with a value of 14.368%, other than this peak time, rise time and settling time also get reduced by 42.85%, 36.67% and 27.32% respectively.
Due to the inner closed loop, the peak overshoot value for complete proposed AMB system with PD-FLC has increased but it is still 37.09% less than PID controller with complete proposed AMB system. The increment and decrement of various transient state parameters values of proposed AMB system (when inner closed loop is unity) and complete proposed AMB system with PD-FLC is listed in Table 6. Step responses for both forms of closed loop proposed AMB system is shown in Figure 20.
Table 6 Change in transient state parameters with PD-FLC.
| Transient state parameters | Change in value |
|---|---|
| Percentage Overshoot | +76.25% |
| Peak Time | -13.0434% |
| Damping Ratio (ξ) | -15.757% |
| Rise Time | -16.122% |
| Settling Time | +9.9316% |

Reduction in rise time and peak time lead to a faster response but increased settling time make the complete system sluggish in steady state region but compared to PID controller with complete proposed AMB system, the performance is improved. Further improvement in transient state parameters can be observed with the implementation of PID-FLC as a position controller for the proposed system.
4.3. Simulation of proposed active magnetic bearing (AMB) system with PID-fuzzy logic controller (PID-FLC)
PID-FLC as a position controller for the proposed AMB system (when inner closed loop is unity) is simulated in MATLAB as illustrated in Figure 21 and unit step signal is input to observe the step response of the closed loop.

Transient state parameters obtained by the step response of PID-FLC with proposed AMB system (when inner closed loop is unity) shows a decrement in peak overshoot. As compared to PID controller and PD-FLC, the peak overshot reduced by 62.12% and 14.266% respectively. Remaining other parameters like rise time, peak time and settling time also get reduced and their values are listed in Table 8, which makes the closed loop faster with less oscillations. The same PID-FLC is simulated with the complete proposed AMB system by applying a unit step signal as a reference signal which is shown in Figure 22.
Table 7 Change in transient state parameters with PID-FLC.
| Transient state parameters | Change in value |
|---|---|
| Percentage Overshoot | +68.808% |
| Peak Time | -10.256% |
| Damping Ratio (ξ) | -12.969% |
| Rise Time | -7.83% |
| Settling Time | -10.946% |
Table 8 Transient state parameters with PID controller, PD-FLC and PID-FLC.
| Proposed AMB System | When inner closed loop is unity | Complete proposed active magnetic bearing (AMB) system | ||||
|---|---|---|---|---|---|---|
| Type of Controller | PID controller | PD Fuzzy logic controller | PID Fuzzy logic controller | PID controller | PD Fuzzy logic controller | PID Fuzzy logic controller |
| Percentage Overshoot (%) | 18.452 | 8.152 | 6.989 | 22.840 | 14.368 | 11.798 |
| Peak Time (seconds) | 0.066 | 0.046 | 0.039 | 0.070 | 0.040 | 0.035 |
| Damping Ratio (ξ) | 0.47268 | 0.62372 | 0.64630 | 0.42538 | 0.52544 | 0.56248 |
| Rise Time (seconds) | 0.02468 | 0.01991 | 0.01673 | 0.02637 | 0.01670 | 0.01542 |
| Settling Time (seconds) | 0.14287 | 0.09364 | 0.05874 | 0.14164 | 0.10294 | 0.05231 |
| Steady State Error | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 |
| Phase Margin (Degree) | 47.268 | 62.372 | 64.63 | 42.538 | 52.544 | 56.248 |

The step response of complete proposed AMB system and proposed AMB system (when inner closed loop is unity) with PID-FLC is plotted in Figure 23 and changed data is shown in Table 7.

The information in Table 8 makes it clear that the proposed AMB system with PID-peak FLC has an overshoot value of 11.798%. It is still the minimum obtained overshot as compared by PID controller and PD-FLC with complete proposed AMB system.
It is noticeable from Table 8 that implementing the PID-FLC on the complete proposed AMB system improves the overall response of the system.
Next section will show comparison among performance of PID, PD-FLC and PID-FLC, as a position controller. First, with the proposed AMB system (when inner closed loop is unity) and then with the complete proposed AMB system.
4.4. Performance comparison among PID controller, PD-FLC and PID-FLC
For the proposed AMB system when inner closed loop is unity, the step responses with different controllers are shown in Figure 24 and data of the transient state parameters are listed in Table 8. Comparing the transient parameters values of PID controller with PID-FLC clears that the peak overshoot, rise time, peak time and settling time are improved by 62.12%, 32.21%, 40.90% and 58.88% respectively. This improvement makes the closed loop faster and more robust to sudden changes.
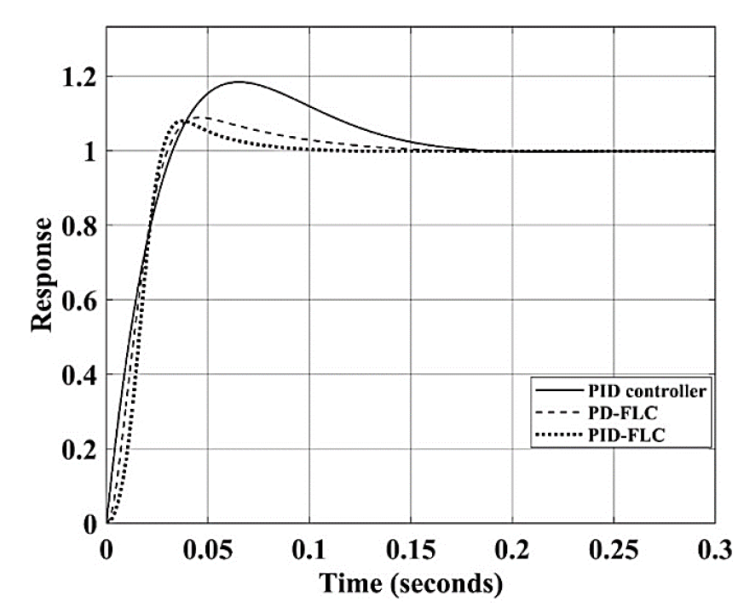
Figure 24 Step responses of proposed AMB system (when inner closed loop is unity) with PID controller, PD-FLC and PID-FLC.
For second-order systems, the closed-loop damping ratio is (Nise, 2011),
Therefore, when inner closed loop is unity the Phase margin with PID controller ≅ 100 × 0.47268 = 47.26°, with PD-FLC ≅ 100 × 0.62372 = 62.372° and with PID-FLC ≅ 100 × 0.64630 = 64.630°.
Phase margin of a system shows allowable open loop phase change to a system to make its closed loop unstable. This margin should be so appropriate and precise as higher value of phase margin leads to a sluggish performance and lower value will show a little stability margin. With PID-FLC the phase margin of the system increased by 36.73% over PID which results in an increased stability region.
From Figure 24 it is noticeable that the PID-FLC gives a smooth and better transient performance as compared to PID and PD-FLC.
The step responses of different controllers with the complete proposed AMB system are depicted in Figure 25 and the related transient state parameters are shown in Table 8. Here, again the PID-FLC shows an improvement in performance over PID and PD-FLC and comparison between PID and PID-FLC explains that peak overshoot, rise time, peak time and settling time reduced by 48.345%, 41.52%, 50% and 49.18% respectively.

The phase margin of the complete proposed system with PID controller is 42.53°, with PD-FLC is 52.54° and with PID-FLC is 56.24°. The increased phase margin with PID-FLC (13.71° as compared to PID, almost 32.23% increment) represents that the complete proposed AMB system with PID-FLC is more stable as compared to PID and PD-FLC. Range of the dynamic parameters obtained from the analysis are listed in Table 9 below.
Table 9 Range of dynamic parameters.
| Sl. No. | Parameter | Range |
|---|---|---|
| 1. | Percentage Overshoot (%) | 6% to 23% |
| 2. | Damping ratio (ξ) | 0.40 to 0.65 |
| 3. | Peak Time (sec) | 0.39 to 0.07 |
| 4. | Rise Time (sec) | 0.015 to 0.027 |
| 5. | Settling Time (sec) | 0.05 to 0.15 |
| 6. | Phase margin (Degree) | 400 to 650 |
From Figure 24 it is noticeable that the PID-FLC gives a smooth and better transient performance as compared to PID and PD-FLC
The step responses of different controllers with the complete proposed AMB system are depicted in Figure 25 and the related transient state parameters are shown in Table 8. Here, again the PID-FLC shows an improvement in performance over PID and PD-FLC and comparison between PID and PID-FLC explains that peak overshoot, rise time, peak time and settling time reduced by 48.345%, 41.52%, 50% and 49.18% respectively.
The phase margin of the complete proposed system with PID controller is 42.53°, with PD-FLC is 52.54° and with PID-FLC is 56.24°. The increased phase margin with PID-FLC (13.71° as compared to PID, almost 32.23% increment) represents that the complete proposed AMB system with PID-FLC is more stable as compared to PID and PD-FLC. Range of the dynamic parameters obtained from the analysis are listed in Table 9 below.
Here, from the Table 9, it is easily observable that the phase margin for the overall system varies from 400 to 650. This range is most desirable as the system shows better stability and a speedy performance in between this range.
4.5. Comparative analysis
Peak overshoot is shown in the Table 10 above as
Table 10 Comparative analysis of proposed controller with available controllers.
| Sl. No. | Controller used | Obtained Parameters values | Remarks | Ref. No. |
|---|---|---|---|---|
| 1. | Lead | %M p ≈ 16 |
|
(Debnath & Biswas, 2020) |
| 2. | PID | %M p ≈ 14 |
|
(Gupta et al., 2018) |
| 3. | PID | %M p is slightly greater than 15% |
|
(Bo et al., 2021) |
| Incomplete PID | %M p is slightly less than 15% | |||
| PSO-Fuzzy PID | %M p is almost 11% | |||
| 4. | Integer order PID | %M p is almost 12% | Control performance compassion is observed for three set of integer order PID and a FO- PID controller for a radial four DOF active magnetic system. | (Zhang et al., 2021) |
| FO-PID | %M p is almost 12% |
This overshoot is further enhanced with its related time domain parameters using fuzzy-PID controller. For the case when inner current controlling loop is unity, the fuzzy-PID controller shows a peak overshot of 6.989%. Considering the completely proposed loop of AMB system the obtained peak overshoot further reduces to 11.798%.
5. Conclusion
Active magnetic bearing (AMB) system is inherently nonlinear and open loop unstable system. Due to which, the proposed AMB system is first dynamically modelled and linearized at an equilibrium operating point
It is evident from the data listed in Table 8 that PID-FLC gives overall a better transient state and steady state response as compared to PID and PD-FLC. Peak overshoot of the proposed AMB system (when inner loop is unity) reduces from 18.452% to 6.989% and the phase margin get increased by 36.731%, which increases the relative stability region of the system, remaining transient state parameters also get improved using PID-FLC. When rotor position of complete proposed AMB system is controlled by PID-FLC, reduces the overshoot by 48.345%, increases the speed (rise time) of the system by 41.52% and the system reaches to steady state 49.18% faster, as compared to PID controller.
Relative stability of the completely proposed AMB system (with PID-FLC) increases by a factor of 32.23% as compared to PID controller and 3.62% as compared to PD-FLC. Therefore, the observed data states that, the designed fuzzy logic-based controllers are managed to handle the instability of the proposed system much better than the conventional PID controller and can be further modified to improve the system performance

