











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
1. Introducción
Las lesiones medulares son causantes de discapacidades que impiden el movimiento de las personas que las sufren, de acuerdo con Henao-Lema y Pérez-Parra [1] los avances científicos y tecnológicos en prevención atención y manejo de discapacidades permiten el aumento en la expectativa de vida del individuo que se encuentra en condiciones de discapacidad. Lo cual lleva a la necesidad de proveer servicios funcionales que permitan la inclusión social.
La tetraplejia es una discapacidad que genera inmovilidad, así como falta de sensibilidad en miembros tanto superiores como inferiores causadas por lesiones en la medula espinal, un relato de un paciente llamado Jesús publicado por Fernández-Pascual [2] indica como un accidente vial lo llevó a esta discapacidad, así como tener que vivir en silla de ruedas relatando el antes y después y la forma en que tuvo que adaptarse a su situación.
Las complicaciones respiratorias son una de las principales causas de muerte en pacientes con esta discapacidad sobre este tipo de complicaciones García-P. et al [3] postulan que los principales causantes de los problemas respiratorios en estos pacientes son la debilidad de los músculos intercostales y abdominales, y la disfunción parcial o total del diafragma y presentan alternativas terapéuticas para prevenir, manejar y tratar estos tipos de complicaciones.
El retorno a la vida cotidiana posterior al proceso de rehabilitación en un hospital es un proceso de gran dificultad que requiere de tiempo dedicación y preparación emocional debido a la cantidad de obstáculos y retos que este representa, Gifre, Valle, Yuguero, Gil y Monreal [4] identifican en su investigación los factores más relevantes que contribuyen a mejorar la calidad de vida y del cómo perciben los pacientes su entorno y calidad de vida una vez que han salido del centro de rehabilitación.
El problema de la independencia en los pacientes con tetraplejia es un tema sobre el cual estudiar hoy día para mejorar la calidad de vida de estas personas. Un artículo de la revista cubana de ortopedia y traumatología escrito por Bernal-González, Cabrera-Viltres, Nápoles-Pérez, y Álvarez-Placeres [5] presenta una cirugía de reconstrucción de la mano en pacientes con tetraplejia en el cual se describe el restablecimiento de la pinza y agarre de la mano del paciente haciendo uso de las técnicas de Zancolli y House, con lo cual se favorece la autonomía del paciente y se logra en ellos un alto grado de satisfacción.
Un artículo de la revista Medisur en Cienfuegos, Cuba presentado por la Universidad Tecnológica Equinoccial de Quito, Ecuador y la Universidad Estatal del Suroeste de Rusia muestra el diseño de un sistema para controlar una silla de ruedas mediante señales eléctricas cerebrales, haciendo uso de una diadema comercial para la adquisición de señales cerebrales y un microcontrolador. En el trabajo de Freire-Carrera, Chadrina, Maila-Andrago y Drozdov [6] emplean la herramienta de software LabVIEW para detectar las señales cerebrales y realizar una comunicación con el microcontrolador.
Una investigación realizada por Gago- Fernández y Seco-Calvo, J [7] muestra el caso de una paciente tetrapléjica espástica, la cual mediante la intervención de la fisioterapia luego de 8 meses logró una independencia funcional en su vida al conseguir el manejo de una silla de ruedas eléctrica modificada de acuerdo a sus necesidades.
2. Marco de referencia
De acuerdo con la Real Academia Española (RAE), la definición de tetraplejia se refiere a la parálisis en las cuatro extremidades, es decir, en manos y pies, por lo cual los pacientes con este padecimiento no pueden realizar movimientos más que en la cabeza lo cual representa un gran reto al encontrarse en esta condición. Esta discapacidad es causada principalmente por daños en la médula espinal derivados en mayor parte de accidentes de tráfico, sin embargo, también se puede generar por tumores u otro tipo de enfermedades de canal vertebral [1, 4].
Actualmente no existe una cura, pero sí que se aborda la pérdida de funcionalidad y sensibilidad en ciertas partes del cuerpo, teniendo en cuenta el alcance de la lesión y la condición del paciente. Con respecto a las lesiones de la médula espinal, se intenta prevenir las más graves y hacer que el paciente pueda volver a tener la vida más activa con la mejor calidad de vida posible. Algunos tratamientos pueden incluir: cuidado de la respiración, cuidado de la piel, ejercicios para mejorar el movimiento y la fuerza, terapia ocupacional, programas para mejorar el control del intestino y la vejiga [2, 3, 4].
Las señales mioléctricas son un tipo de bioseñal generada a partir de la actividad muscular, las cuales se caracterizan por tener una muy baja amplitud en el rango de los milivoltios (mV), debido a esto, las señales requieren una etapa de amplificación y filtrado para poder ser procesadas e interpretadas por medio de software. Se sabe que este tipo de señales tienen un rango de operación que varía entre 0V - 10 mV en amplitud dependiendo del músculo que se esté monitoreando. Estas señales están superpuestas junto a otras señales que hay en el ambiente, razón por la cual, la etapa de filtrado debe de canalizar las señales en una ventana específica de frecuencias, la misma que deberá estar comprendida entre 0.2 Hz y 40 Hz [8].
Una vertiente de las ciencias exactas que incluye el estudio, desarrollo e innovación de tecnologías para fines médicos, como terapia o rehabilitación es la ingeniería biomédica. Es dentro de esta disciplina que se encuentra inmerso el desarrollo de interfaces mioeléctricas (EMG); una interfaz EMG es un dispositivo electrónico que hace uso de señales biológicas producidas por los músculos del cuerpo, las cuales son procesadas y analizadas por un circuito electrónico además de un software [9, 10]. Con las bioseñales obtenidas a partir del musculo es posible analizarlos cuando existe daño en ellos, pero también pueden ser utilizadas para detectar la actividad muscular siendo una herramienta utilitaria para el control de prótesis y otros sistemas biomédicos [11, 12].
Sin embargo, los avances tecnológicos han permitido el uso de las señales de EMG en múltiples aplicaciones de control, ejemplo de ellos es el trabajo de Yin, Zhang, Chen y Lemos [13] donde se presenta un control de velocidad aplicado a un exoesqueleto conectado a una cinta de correr integrada con EMG con el objetivo de proporcionar una mejor interacción entre el usuario y el sistema. Bouteraa, Abdallah y Elmogy en [14] presentan el diseño y desarrollo de un dispositivo robótico para la rehabilitación de los miembros superiores donde se aplica el EMG para seguimiento. Dalal y Keshwala en [15] muestran el diseño y análisis de un prototipo de mano protésica impresa en 3D controlada por EMG. Así mismo, la electromiografía ha sido empleada recurrentemente para su uso como apoyo para la movilidad de personas con discapacidad, esto se puede ver en el trabajo de Kaur [16] donde se realiza la revisión de un sistema de EMG para conducir una silla de ruedas para personas con discapacitados motriz. Kundu, Mazumder, Lenka y Bhaumik en [17] presentan un sistema de control basado en gestos manuales en una silla de ruedas omnidireccional utilizando una unidad de medición inercial (IMU) y sensores mioeléctricos para reconocer siete gestos comunes y clasificar sus características. Vigliotta, Cipleu, Mikell y Alba-Flores en [18] emplean el brazalete comercial Myo que contiene 8 sensores de EMG y una unidad de medición inercial (IMU) para recopilar las señales de EMG y utilizarlas para el control de una silla de ruedas. Por último, Manero, McLinden, Sparkman y Oskarsson en [19] aplican el EMG para controlar una silla de ruedas, sin embargo, utilizan un método donde se reconoce la intensión de movimiento y no el movimiento final, para ser aplicados en personas con esclerosis lateral amiotrófica las cuales tienen movimientos involuntarios.
3. Planteamiento del problema y solución propuesta
3.1 Planteamiento del problema
Los principales motivos por los cuales una persona se encuentra en discapacidad, son los accidentes, específicamente la tetraplejia es ocasionada en mayor grado por accidentes viales, los cuales pueden dejar con inmovilidad de los miembros superiores e inferiores a las personas que sufren este tipo de incidentes en su vida [1, 2].
De acuerdo a datos obtenidos por la OMS, cerca de 1,000 millones de personas padecen algún tipo de discapacidad, esta cifra representa alrededor del 15% de la población mundial [20]. Las personas con discapacidades presentan peores resultados sanitarios, obtienen resultados académicos inferiores, participan menos en la economía y registran tasas de pobreza más altas que el resto de las personas. En el caso de la tetraplejia la población es mucho menor, sin embargo, no se deben dejar de lado las dificultades que esta discapacidad genera a las personas que la padecen, entre los efectos más comunes de esta se encuentran problemas respiratorios, complicaciones en la vejiga e intestinos, problemas digestivos, incapacidad de movimiento en la mayor parte del cuerpo, falta de sensibilidad y problemas de autoestima [21, 22, 23]. El mayor problema para los pacientes con este tipo de discapacidad es que por su condición no pueden operar una silla de ruedas para movilizarse, por lo cual siempre dependen de otra persona para realizar esta tarea.
3.2 Solución propuesta
Se propone diseñar e implementar un prototipo de una silla de ruedas controlada, mediante señales electromiográficas para independizar al paciente tetrapléjico, en la realización del movimiento y control de esta.
El prototipo de silla de ruedas se plantea como una alternativa a la independencia para el paciente tetrapléjico, esto con la finalidad de que pueda controlar el sistema con las partes del cuerpo en las que sí tiene capacidad de movimiento como lo son los músculos faciales. El que un paciente tetrapléjico pueda controlar por sí solo una silla de ruedas además de independencia, le puede ser de gran utilidad en el aspecto emocional al mejorar considerablemente sus niveles de autoestima y confianza logrando con ello una mejor seguridad favoreciendo su salud emocional.
4. Metodología
Para realizar el diseño se tuvieron en cuenta algunas consideraciones, como el software a utilizar y bosquejo de este en papel, para lo cual se utilizó el software EAGLE de AUTODESK. Este tipo de circuito requiere de distintas etapas para realizar de forma correcta su función, las cuales se muestran en el diagrama de la Figura 1.

4.1. Adquisición
Para la etapa de amplificación se puede hacer uso ya sea del circuito integrado AD620 o el INA114 [24], debido a que ambos componentes cuentan con la misma distribución de pines mostrada en la Figura 2.

Como se observa, los pines 2 y 3 son la entrada de la señal y las terminales RG son para colocar la resistencia requerida de acuerdo con la ganancia que sea necesaria en el circuito, la cual está dada por la ecuación (1) proporcionada en la hoja de datos del fabricante.
Donde RG es la resistencia que se va a colocar y G la ganancia que se necesita.
4.2. Filtrado
La siguiente etapa es el filtrado, en esta se puede utilizar cualquier circuito integrado de amplificadores operacionales que cumpla con las características requeridas para el circuito el cual se alimenta por fuentes de 9v y -9v en este caso el componente elegido es el TL084 mostrado en la Figura 3 que cuenta con 4 amplificadores los cuales son suficientes para el diseño de los filtros.
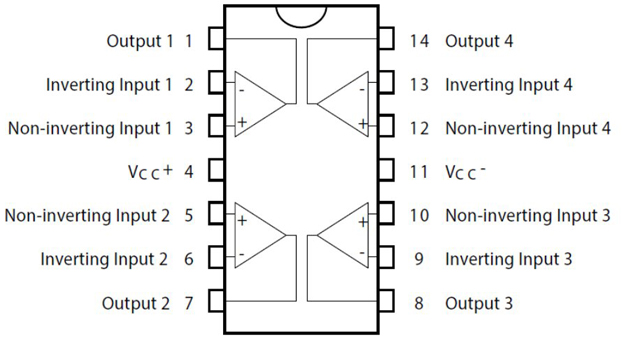
Figura 3 Distribución de pines del TL084, obtenida de la hoja de datos del fabricante, Texas Instrument.
4.2.1 Filtro pasa bajas
Considerando una frecuencia de corte (fc) de 300Hz, un Capacitor de 0.1uF (C) y de acuerdo a la ecuación (2) el diseño del filtro queda definido en la Figura 4.

Las resistencias de 1kΩ que se observan en la parte superior son para obtener una pequeña ganancia de 2 una vez que la señal haya sido filtrada de acuerdo a la configuración no inversora del filtro.
4.2.2. Filtro pasa altas
Considerando una frecuencia de corte (fc) de 20Hz, un Capacitor de 0.1uF (C) y de acuerdo a la ecuación (2) el diseño del filtro queda definido en la Figura 5.

4.2.3. Filtro Notch
Este filtro mostrado en la Figura 6 se encarga de eliminar señales en una frecuencia determinada, en este caso se requiere eliminar el ruido eléctrico por lo cual el diseño debe ser implementado para 60 Hz [25, 26], los valores de los componentes en este filtro se rigen por las ecuaciones (3), (4) y (5) para las cuales se tiene fo = 60 Hz, C = 100 pF.

Lo mostrado en la Figura 6 es el circuito utilizado, sin embargo, se ha realizado un nuevo diseño del circuito con filtros de mayor orden para mejorar la interpretación de las señales, el diseño de dicho circuito se muestra a continuación. En el circuito los componentes principales son los mismos por lo cual solo se muestra la etapa de filtrado que fue en la que se realizaron cambios.
4.2.4 Filtro pasa bajas (Segundo orden Sallen-Key)
Considerando una frecuencia de corte (fc) de 300 Hz, un capacitor de 220 nF (C) y de acuerdo a la ecuación 6 el diseño del filtro queda definido en la Figura 7.

Las resistencias de 33 kΩ y 56 kΩ que se observan en la parte del amplificador son para obtener una aproximación Butterworth R1/R2=0.586.
4.2.5. Filtro pasa altas (Segundo orden Sallen-Key)
Considerando una frecuencia de corte (fc) de 10 Hz, un capacitor de 220 nF (C) y de acuerdo a la ecuación 6 el diseño del filtro queda definido en la Figura 8, de igual forma se realizó una aproximación Butterworth con las resistencias de la parte más próxima al amplificador.

Cabe mencionar que para el diseño se colocaron dos filtros de segundo orden en cascada para con ello generar un cuarto orden.
4.3 Conversión analógica a digital
Una vez realizada la etapa de filtrado se requiere acondicionar la señal de tal forma que se pueda procesar digitalmente para lo cual es necesario realizar ajustes en la señal de salida, de tal forma que se pueda digitalizar los cual se realiza mediante un circuito de ajuste offset mostrado en la Figura 9, que cuenta con un amplificador operacional y en este caso el encargado de digitalizar la señal será la placa Arduino nano.

El ajuste del offset se realiza debido a que el medio de digitalización de la señal será un Arduino el cual solo admite señales de entre 0 - 5 V por lo cual la parte negativa de la señal no se podría visualizar de no implementar este circuito, una vez hecho esto la salida PUT-1 se conecta a un pin analógico del Arduino para poder ser digitalizada.
4.4 Parametrización de la señal
Una vez que se tiene la señal digitalizada es necesario realizar una observación de esta en la herramienta “serial Plotter” del IDE Arduino, una vez graficada la señal se debe analizar si es necesaria la creación de un filtro digital de tal forma que sea posible la interpretación de esta. Una vez hecho el filtrado digital, se procede a procesar la señal digitalmente de tal forma que al realizar movimientos musculares se pueda identificar la respuesta frecuencial y de amplitud de la señal siendo posible definir al menos 4 parámetros utilizables para programar una acción, es decir asignar el envío numérico del 1 al 4 representando los movimientos musculares realizados, en la Tabla 1 se establece la relación entrada - salida.
4.5 Circuito de interpretación de datos
Para la construcción del circuito intérprete es necesario el uso de un Arduino que recibe los datos del circuito de adquisición de señales, las cuales son enviadas ya procesadas y de manera inalámbrica. Esta placa Arduino controla un circuito Puente H, el cual a su vez controla 2 motores que realizan lo indicado con los movimientos del usuario, en cierta forma este circuito es un decodificador que realiza acciones de acuerdo a las señales recibidas como se puede observar en la Tabla 2.
4.6 Pruebas de comunicación inalámbrica
Para las pruebas de esta comunicación fue necesario hacer uso de dos módulos Bluetooth HC-05 los cuales tendrán una configuración distinta dependiendo del fabricante. Para realizar la comunicación entre los dos circuitos fue necesario configurar un Bluetooth como esclavo y otro como maestro, para que fuera posible la conexión entre estos, para esto se hace uso de los comandos AT los cuales se especifican en la hoja de datos del fabricante del componente, los comandos necesarios son para cambiar el nombre, modo (esclavo/maestro) y configurar la conexión automática entre los dos dispositivos [27, 28]. En el monitor serial se teclean los comandos descritos en la Tabla 3.
Cabe mencionar que es necesario tener presionado el botón del módulo, antes de alimentarlo para que permita ingresar al modo de configuración. Una vez configurados los módulos se conectarán cada que se enciendan y se puede comenzar con las pruebas.
Tabla 3 Comandos necesarios para configurar el HC-05
| Comando AT | Respuesta |
|---|---|
| AT | Ok |
| AT+NAME | HC-05(nombre de fábrica) |
| AT+ROLE | Indica si es esclavo o maestro con 0 y 1 respectivamente |
| Cambio de parámetros y configuración | |
| AT+NAME=Maestro/Esclavo | Cambiará el nombre del dispositivo |
| AT+ROLE=0/1 | Cambiará el rol del dispositivo |
| AT+CMODE=0 | Configura la conexión por dirección mac (solo es necesaria en el maestro) |
| AT+BIND=dirección mac del dispositivo esclavo | Asigna la dirección del dispositivo al cual se va a conectar (solo es necesaria en el maestro) |
4.7 Desarrollo de la app
Para el desarrollo de la app lo más viable en cuanto a ahorro de tiempos fue utilizar MIT App inventor [29, 30], debido a la simplicidad con la que se pueden crear aplicaciones para tareas sencillas como la que se necesita para este prototipo, además de no requerir de una instalación previa ya que se puede desarrollar en la web [31]. Para la creación de esta interfaz, es necesario apoyarse de al menos 2 diseños para poder realizar una encuesta con al menos 10 personas y definir que interfaz es más intuitiva y amigable para el usuario, la idea principal de esto es que el usuario no necesite una capacitación muy compleja para poder utilizar el prototipo.
5. Resultados
Una vez realizadas las pruebas necesarias con el software EAGLE se obtuvo el circuito esquemático mostrado en las Figuras 10, 11 y 12, el cual ya cuenta con un Jack 3.5 para la conexión de los electrodos, entrada de alimentación tomando en cuenta el uso de dos baterías de 9v y una salida de la señal la cual se conecta al microcontrolador para digitalizarla.



Obtenido el diseño del circuito se imprimieron las plantillas en papel couché las cuales se muestran en la Figura 13 para posteriormente realizar el planchado y obtener el circuito en la placa fenólica.

Lo mostrado en las figuras 14 es lo obtenido una vez hecho el proceso de impresión del circuito PCB para posteriormente realizar el montaje de los componentes mostrado en la figura 15.
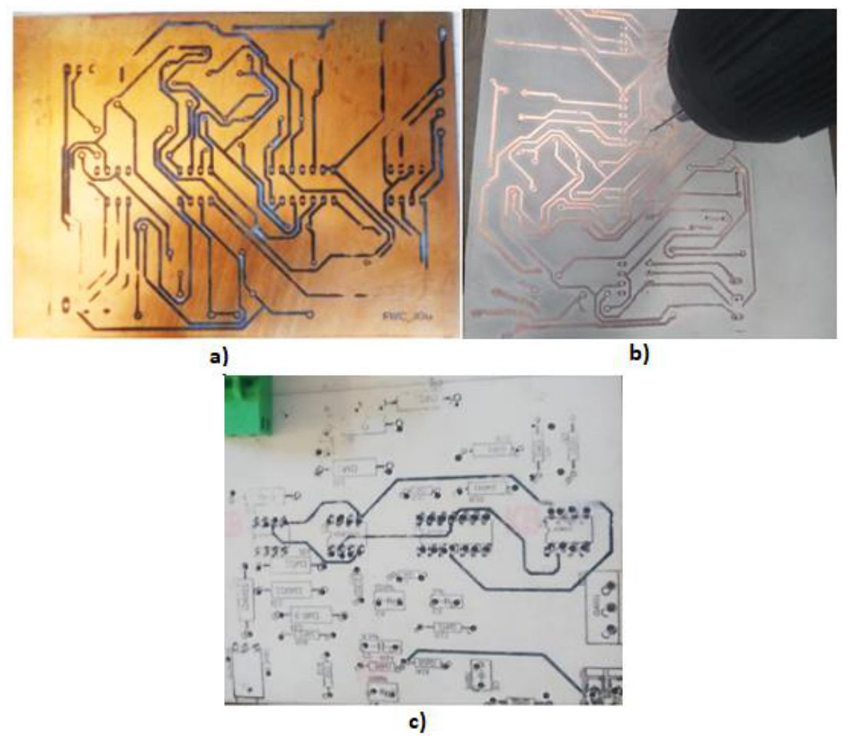
Figura 14 Muestra de las tarjetas de PCB, a) marcado de pistas sobre placa, b) placa después del proceso químico para la remoción del exceso de cobre y c) placa con perforaciones para colocar componentes.

Para el caso del segundo diseño se había planteado la elaboración de una placa de doble cara, sin embargo, el proceso no se pudo realizar correctamente, por lo cual se seguirá utilizando el primer diseño mientras se logra mandar a manufacturar el PCB del segundo diseño.
Teniendo la placa montada se conectaron los electrodos a los latiguillos y la salida de la placa base al microcontrolador para observar la señal obtenida y comparar la forma de esta con una señal de EMG normal. En la Figura 16 se muestra la conexión de los electrodos al usuario.

Una vez realizadas las conexiones se graficaron las señales obtenidas por el circuito para múltiples movimientos, en la Figura 17 se muestra la gráfica del EMG para un movimiento de apertura de la boca, en la Figura 18 se realiza un movimiento que hace fuerza en el maxilar y en la Figura 19 muestra la gráfica con un movimiento del maxilar hacia enfrente.



Las formas de la señal se pueden poner en comparación con lo obtenido en los trabajos de Correa-Figueroa et al. [9], Zhu et al. [32], Yeon y Herr [33] en los cuales se muestra la señal en bruto como se presenta en las anteriores imágenes y además también se muestra ya filtrada digitalmente, cabe mencionar que a las señales mostradas en las Figuras anteriores solo tienen el filtrado analógico, es decir una vez aplicando filtros digitales se reducirán ciertos picos en la señal [34, 35], un ejemplo de la señal en bruto de un EMG y filtrada digitalmente se muestra en el trabajo de Correa-Figueroa et al. [9], sin embargo, se toma en cuenta que el músculo del cual se adquirieron las señales en el presente trabajo es un músculo facial y en el trabajo de Correa-Figueroa et al. [9] es un músculo de brazo.
El circuito implementado para el control de los motores es únicamente otro microcontrolador que interpreta los datos recibidos para realizar el movimiento de los motores, en la Figura 20 se muestra un montaje realizado a manera de prototipo para verificar el funcionamiento de este. En este montaje solo se reciben datos por Bluetooth los cuales asignan movimientos a los motores y permiten el control de este, ya sea mediante el circuito de adquisición de datos o mediante la aplicación móvil.

Una vez que se observó el funcionamiento en el prototipo de la Figura 20 se procedió a realizar el montaje en tamaño real para esto se utilizaron 2 motores 24 V DC 17 A una batería de 12 V a 7 A y el puente h utilizado se cambió por uno de mayor capacidad en cuanto a corriente, para lograr que el prototipo en tamaño real quedara como se muestra en la Figura 21.

Como se muestra en la imagen se utilizaron bandas para transmitir el movimiento de los motores a las ruedas lo cual permitió que la silla se moviera en la dirección indicada por medio de la app y del circuito de adquisición de datos. La aplicación móvil realizada para fungir como control auxiliar al EMG funcionó sin problemas, para la cual se programó que los datos enviados fueran del 1 al 4 para que el circuito interprete realizara los movimientos en las direcciones indicadas. Tomando en cuenta algunas sugerencias se optó por añadir control por voz al prototipo el cual fue incorporado dentro de la misma app quedando el diseño de esta como se muestra en la Figura 22.

6. Conclusiones
El circuito fue diseñado por medio del software EAGLE y posteriormente aplicando la técnica de planchado se creó la placa impresa PCB, la señal obtenida de este fue muy aleatoria para poder parametrizar y asignar acciones, por lo cual se tuvo que implementar un filtro digital de promedio exponencial para suavizar los picos y eliminar ruido de la señal, aún con esto la señal fue un tanto difícil de interpretar. Se realizó una parametrización de esta haciendo un envío de datos numéricos del 1 al 4 para los movimientos direccionales al circuito interprete, que son las acciones logradas hasta el momento.
Se diseñó un segundo circuito con filtros de 4to orden para mejorar la forma de la señal y de esta manera lograr un mejor control del prototipo, sin embargo, el diseño no se pudo plasmar en un PCB debido a que el equipo de laboratorio dejó de funcionar después de la impresión de la primera capa, y al ser un circuito de tal complejidad se descartó la opción de realizarlo mediante el método de planchado.
El prototipo de la silla se realizó haciendo uso de un puente H el cual controla dos motores DC, este a su vez conectado a un microcontrolador que recibe instrucciones del circuito de adquisición de señales de EMG y de una app móvil, el prototipo se programó de tal forma que realizara movimientos de acuerdo a los datos recibidos, en este caso del 1 al 4, 1 adelante, 2 derecha, 3 izquierda, 4 atrás. Este funcionó de la manera correcta respondiendo a los datos recibidos tanto del circuito de adquisición de señales como de la aplicación móvil.
Posterior a la revisión del funcionamiento del prototipo a escala se procedió a realizar el armado en tamaño real del prototipo haciendo uso de una silla de ruedas simple para colocarle los motores y el circuito de control de estos el cual funcionó de manera adecuada generando los movimientos indicados.
La comunicación inalámbrica se empleó mediante Bluetooth, haciendo uso de dos módulos HC-05 para la cual se tuvo que configurar un módulo como maestro y otro como esclavo, así mismo se realizó la configuración para que se conectaran automáticamente estando los dos encendidos. Para conectar la app con el prototipo primero se tuvo que apagar el circuito de adquisición de datos para que el módulo Bluetooth del prototipo quedara disponible para la conexión del dispositivo móvil y poder controlarlo mediante la app.
La aplicación fue desarrollada en MIT App Inventor, la cual consiste de 6 botones conectar, desconectar y 4 botones de direcciones los cuales fueron programados para enviar datos numéricos del 1 al 4, y poder ser interpretados por el prototipo. Dicha aplicación funcionó sin problema alguno y fue posible controlar el prototipo mediante este medio, además de incorporar en esta un control de voz logrando de esta manera 3 diferentes formas de controlar el dispositivo.

