Apéndice A
Modelo teórico propuesto para contorneo de superficies mediante ESPI con iluminación dual y divergente.
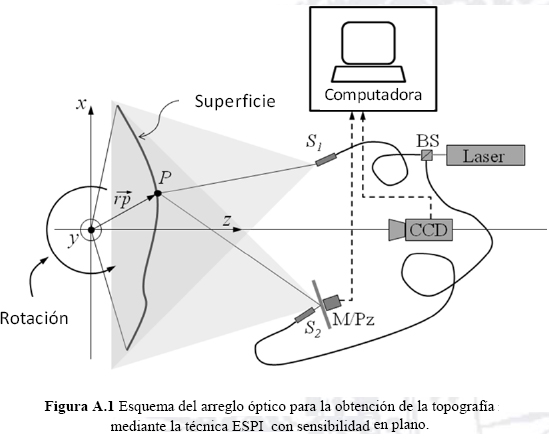
La figura A.1 muestra un esquema del sistema óptico utilizado para la obtención de la topografía por la técnica ESPI con sensibilidad en plano. Un haz láser es dividido mediante un divisor de haz (BS) y guiado por medio de fibras ópticas a las fuentes de iluminación S1 y S2 cuyas coordenadas están en (xs1,ys1,zs1) y (xs2,ys2,zs2) respectivamente. Sean (x,y, z) las coordenadas de un punto P sobre la superficie como se muestra en la figura A.2. En el caso de la obtención de la topografía, se captura una primera imagen mediante la cámara CCD. Posteriormente, la superficie del espécimen es ligeramente rotada a lo largo del eje y y una segunda imagen es capturada y guardada. Hasta ahora, el punto P se ha desplazado hasta el punto P' debido a la rotación. Un patrón interferencia se puede obtener mediante la diferencia entre la primera y la segunda imagen [xii]. Un espejo montado sobre un piezoeléctrico (M/Pz) permite aplicar el método de corrimiento de fase [xiii], mientras que el algoritmo de Carré con cuatro pasos[xiv] es utilizado para encontrar la fase del patrón de franjas. La diferencia de fase observada sobre el punto P de la superficie se define mediante la ecuación [xv]:
Recordando que  es el vector de sensibilidad y
es el vector de sensibilidad y  es el vector desplazamiento. El vector de desplazamiento puede obtenerse mediante la diferencia vectorial entre
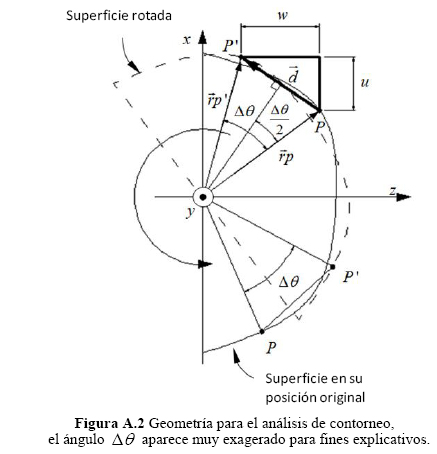
es el vector desplazamiento. El vector de desplazamiento puede obtenerse mediante la diferencia vectorial entre  como se muestra en la figura A.2.
como se muestra en la figura A.2.
Para el caso de iluminación divergente, el vector de sensibilidad se define como [xvi]:

donde las componentes ortogonales del vector de sensibilidad son:
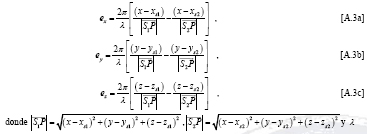
es la longitud de onda de las fuentes de iluminación.
El desplazamiento del punto P ocurrirá en el plano xz, siendo la rotación con respecto al eje y. Por lo tanto, para el vector desplazamiento  componente v puede despreciarse. Para determinar la cantidad de desplazamiento de P tendremos que tener en cuenta la aproximación numérica para el ángulo de rotación Δθ de tal manera que: |sin(Δθ)| ≈|Δθ| y cos|(Δθ)| ≈ 1. La cantidad de desplazamiento
componente v puede despreciarse. Para determinar la cantidad de desplazamiento de P tendremos que tener en cuenta la aproximación numérica para el ángulo de rotación Δθ de tal manera que: |sin(Δθ)| ≈|Δθ| y cos|(Δθ)| ≈ 1. La cantidad de desplazamiento  del punto P se puede encontrar con la relación:
del punto P se puede encontrar con la relación:

Observando la figura A.2, podemos relacionar las cantidades de desplazamiento u y w con las relaciones:

Una simple cámara solo puede detectar desplazamientos en plano; en otras palabas, una cámara no puede detectar la profundidad o el desplazamiento en la dirección de z. Sin embargo, debido a la rotación del objeto, se puede relacionar los desplazamientos observados con el desplazamiento W. en la dirección de z por medio de las ecuaciones A.5a y A.5 obteniendo:

Debido a que la configuración del sistema óptico utilizado es simétrico, la componente ez del vector de sensibilidad puede ser despreciado ya que su contribución al vector de sensibilidad es menor al 0.1%. De las ecuaciones A.3a y A.6 se puede obtener una expresión que relacione la diferencia de fase con la componente de desplazamiento w del punto P(x,y) observado:

La altura Zr del relieve de la superficie observada puede obtenerse usando las componentes vectoriales en la dirección de  de la diferencia vectorial entre
de la diferencia vectorial entre  y
y  mostrado en la figura A.2.
mostrado en la figura A.2.
De tal modo que la componente w del desplazamiento también está relacionado con la altura del relieve superficial obtenido por la diferencia (p' z -pz) . La ecuación A.7 puede reescribirse obteniendo la ecuación para el cálculo de la topografía:

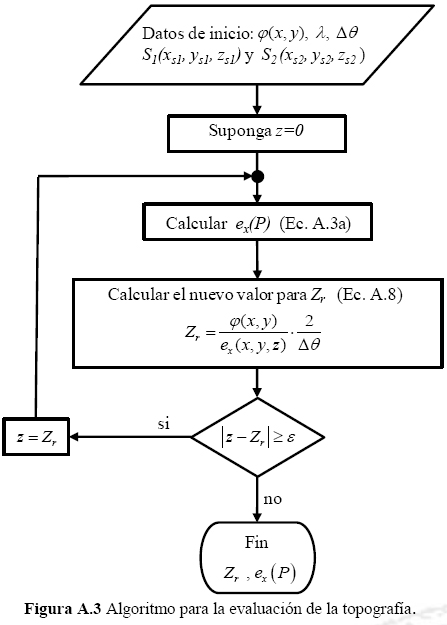
La ecuación A.8 considera iluminación divergente para el contorneo de superficies pero sigue habiendo una dependencia de la topografía en la variable z del vector de sensibilidad. Para resolver la ecuación A.8 se propone el uso de un algoritmo basado en la técnica de Gauss-Seidel mostrado en la figura A.3. El algoritmo inicia calculando el vector de sensibilidad suponiendo que la forma de la superficie es plana, es decir, z = 0 (ecuación A.3a). La primera iteración proporciona una altura aproximada para el valor Zr. Si la cantidad |z - Zr| es mayor a una tolerancia preestablecida ε, entonces z es remplazada por el valor calculado Zr.