











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1 Introduction
Private companies together with governmental agencies are scheduling spectacular missions to Moon. NASA, for instance, has contracts with Boeing and SpaceX to take humans to Low-Earth Orbit as part of the Commercial Crew Development program (Weinzierl 2018). This governmental agency has also envisioned the Artemis program for bringing human back to Moon (Foust 2019). The building of the Orion spacecraft with partnership of Lockheed Martin (Petrescu et al. 2017) is part of this program. The development and building of the European Service Module of Orion is a partnership with ESA and the Airbus (Meiss et al. 2016). The success of these programs, which also intend to build a space station in the cislunar space, represents a huge step to achieve a greater accomplishment: a manned mission to Mars and its future colonization. NASA and Lockheed Martin company have revealed a tight schedule of activities (Cichan et al. 2016) to establish a spacecraft in Martian orbit in order to explore Deimos and Phobos (Martian moons) and the surface of Mars (O'Dell et al. 2018). There are several others companies involved in commercial space activities like Blue Origin and Virgin Galactic for space tourism, Astrobotic for transportation to the Moon, Astroscale for space debris removal, Deep Space Industries for asteroid mining, and many others (Weinzierl 2018).
While manned missions are still not performed in interplanetary space, unmanned missions are exploring the Solar System for several reasons: economic (asteroid mining), colonization perspective (Mars colonization), survival purpose (the studying of dangerous asteroids that could impact Earth), and scientific purposes (life search). The Hayabusa-2 mission embraces two of these reasons: scientific and planetary defense, since it intends to return a sample of the asteroid 162173 Ryugu back to Earth and to test a kinetic impactor (Tsuda et al. 2018). In the context of asteroid missions, NASA proposes a mission to the 16 Psyche asteroid, the largest metal asteroid in the main belt (Shepard et al. 2017). Concerning life search, Europa (Jupiter’s moon) is believed to be the best place in the Solar System to sustain life; in this way, NASA has proposed the Europa mission in which a space vehicle will perform several flybys around this moon in order to study it (Bayer etal. 2017). Titan, the largest moon of Saturn, is the target of a mission in which the Dragonfly, a rotorcraft lander, will explore its surface (Lorenz et al. 2018). Despite several future plans, unmanned missions are limited to the Solar System, and the manned missions are still limited to the low orbits around the Earth. A few cogitate about interstellar missions: the Breakthrough Starshot project (Daukantas 2017) intends to send a probe to reach Proxima Centauri, but several technological advances are needed.
For all these missions, trajectory determinations must be accomplished considering a mathematical model as realistic as possible. Moreover, these trajectories must be minimum-time trajectories or minimum-fuel trajectories (Prussing and Chiu 1986) or a trade-off between these two performance index as the Apollo missions. In order to perform these optimization, an initial guess is necessary, which can be a solution trajectory in a more simple model. (Dei Tos and Topputo 2019), however, develop a method to optimize impulsive trajectories in a complex model that is based on a real ephemeris model. (Izzo et al. 2019) utilizes machine learning based on artificial neural networks, an heuristic method, to represent the optimal guidance profile of an interplanetary mission. (Abdelkhalik and Mortari 2007) utilize a genetic algorithm to solve the transfer between noncoplanar elliptical orbits utilizing impulsive maneuvers. On the other hand, Ellison et al.(2018) develop analytical methods to compute partial-derivatives of two bounded-impulsive trajectories with multiple swing-by maneuvers. Gagg Filho and da Silva Fernandes(2018) build patched-conic approximations to obtain geometrical details of interplanetary missions. Genta and Maffione(2019) state that the parameters and constraints of a trajectory are important to define the launch date, which is vital for the feasibility of the mission. Once a good initial approximation of the trajectory is obtained, a simple optimization method can be utilized as, for instance, the gradient method Addis et al.(2011).
In the context of space missions, the present work proposes models based on the two-body, four-body, and five-body problems for trajectory determination in a preliminary mission analysis from Earth to inner planets (Venus) and outer planets (Mars) considering planar models. Among the models based on the two-body problem there are the well-known interplanetary patched-conic approximation based on the Hohmann transfer, which solves the heliocentric phase; and the interplanetary patched-conic approximation based on the Gauss problem Bate et al.(1971), also known as Lambert’s problem (Battin et al. 1978; Prussing 1979; Battin and Vaughan 1984; Gooding 1990). The characterization of the trajectory phases by the patched-conic approximations is accomplished by the definition of the sphere of influence (SOI), in a way that when the motion of the space vehicle occurs, for instance, inside the Earth’s SOI, the geocentric phase is characterized.
Despite the patched-conic approximations based on the Hohmann transfer and the one based on the Gauss problem being usually used for preliminary mission analysis, these models patch the trajectory phases in an independent way. In this way, the visualization of the complete trajectory has discontinuities and information related to the complete trajectory is lost. In this sense, the present work also utilizes a patched-conic approximation based on a detailed geometry of the transfer problem Gagg Filho and da Silva Fernandes(2018) which determines the complete trajectory by means of a two-point boundary value problem (TPBVP) and it includes a swing-by maneuver with the Moon. Broucke(1988) qualitatively mentions that the Moon is a weak gravitational accelerator; however, the present work extends the conclusion of Broucke(1988) by quantifying the saving of fuel consumption, represented by the sum of the velocity increments, when a lunar swing-by maneuver is performed in an interplanetary mission. The work of Faria Venditti et al.(2010) optimizes interplanetary trajectories considering swing-by maneuvers by using a patched-conic approximation in such way that no discontinuity exist for the velocity vector. Yang et al.(2019) solve a powered swing-by maneuver by using a pseudostate theory and, next, a patching technique matches the segments of the swing-by maneuver with the interplanetary trajectory in order to determine a more realistic trajectory. Lavagna et al.(2005) adopt a multi-objective strategy to minimize both fuel consumption and trip time by considering aero-gravity assist maneuvers. An evolutionary algorithm is used in this last work to avoid trapped solutions in local minima. In the present work, the patched-conic approximations with detailed geometry, and the models based on the four and five-body problem determine the complete interplanetary trajectory without any discontinuity not only in the velocity vector, but also in the position vector; moreover, the swing-by maneuver is solved together with the complete trajectory in an unique TPBVP providing an initial guess to determine the local minimum by means of a gradient technique.
In the context of the interplanetary transfer model based on the planar restricted four-body problem (PCR4BP, Sun-Earth-destiny planet-space vehicle), the present work formulates the same transfer problem with a different approach from the one described by Miele and Wang(1999) but similar to Miele et al.(2004), i.e, the differential equations that govern the motion of the space vehicle are written, in the present work, utilizing Cartesian coordinates (Miele and Wang 1999b utilize polar coordinates) in three distinct forms. Each form defines the differential equations for the relative motion of the space vehicle with respect to Earth, Sun, and destiny planet, respectively. The choice of the proper version of the differential equations is dependent on the predominant gravitational field acting on the space vehicle. A two-point boundary value problem (TPBVP), involving prescribed values of the initial phase angle between the space vehicle and the Earth, and the initial phase angle (rendezvous angle) of the destiny planet, is formulated. Based on this TPBVP, an one-degree of freedom optimization problem concerning the minimization of the total fuel consumption, with a prescribed rendezvous angle, is proposed. A two-degree of freedom optimization problem is also formulated, in which the rendezvous angle is taken as additional unknown. Next, the Moon’s gravitational influence is included in the set of differential equations that describes the relative motion of the space vehicle to Earth; thus, the four-body problem is converted into a five-body problem in the neighborhood of Earth and a three-degree of freedom optimization problem is formulated. Therefore, this last model enables the lunar swing-by maneuver before the leaving of the space vehicle from the Earth’s SOI.
The objective of this work is to analyze Earth-Mars and Earth-Venus transfers from a circular low Earth orbit (LEO) to a circular low orbit around the destiny planet (Venus or Mars) by using bi-impulsive optimal trajectories that minimize the fuel consumption in the context of the two-body, four-body, or five-body problems. This work also investigates the saving of fuel if a lunar swing-by maneuver is performed in these missions. Note that only planar problems are taken into account in the present work, which provides a good approximation for a preliminary analysis. In this case, the patched-conic approximations based on the Hohmann transfer and on the Gauss problem must already provide relevant results. The planar circular restricted four-body model is similar to the one used by Miele and Wang(1997), Miele and Wang(1999), Miele and Wang(1999), and by Miele et al.(2004). In this way, the present paper extends the four-body model used by Miele by including the Moon in a planar circular restricted five-body model, and an analysis for the Earth-Venus mission is also considered.
2 Mathematical Formulation
This section formulates the interplanetary transfer based on the two-body problem,
the restricted four-body problem, and the restricted five-body problem. The
interplanetary mission consists in transferring a space vehicle from a low Earth
orbit (LEO) to a low Mars orbit - LM
t
O (or, to a low Venus orbit -LVO) by applying two
impulses tangential to the terminal orbits. The first velocity increment
Table 1: Inclination and eccentricity of the main body orbits (JPL/NASA)
| Eccentricity | Inclination to the mean ecliptic | |
|---|---|---|
| Venus | 0.0067 | 3.3977° |
| Earth-Moon | ||
| barycenter | 0.0167 | 0.0005° |
| Moon | 0.0554 | 5.1600° |
| Mars | 0.0933 | 1.8518° |
Note in Table 1 that the inclinations of the celestial body orbits used in the present paper are small (the largest is that of the Moon and it is equal to 5.6°), so the orbital motion of the Moon, Earth, Mars, Venus and space vehicle is simplified on the ecliptic plane. In the same way, the orbits of the celestial bodies are considered circular as their eccentricities are small (the largest is that of Mars and it is equal to 0.0933).
Among the models based on the two-body problem there are: the classic patched-conic approximation based on the Hohmann transfer, the patched-conic approximation based on the Gauss problem, the patched-conic approximation with detailed geometry, and the patched-conic approximation with a lunar swing-by maneuver. For all the models based on patched-conic approximations, the interplanetary trajectory is divided in phases, which are defined by the sphere of influence (SOI) of the main bodies. In this way, the patched-conic approximations have, at least, three phases: the geocentric phase, where only the gravitational field of the Earth is considered; the heliocentric phase, where only the gravitational field of the Sun is considered; and, the planetocentric phase, where only the gravitation field of the destiny planet is considered. These models are briefly discussed below. In order to simplify the notation, Mars is considered to be the destiny planet without loss of generality.
2.1 Patched-Conic Approximation Based on the Hohmann Transfer
For the patched-conic approximation based on the Hohmann transfer, the
heliocentric phase is solved first Bate et al. (1971). For this phase, the
Hohmann transfer Bate et al. (1971) Prussing and
Conway(1993) is utilized to estimate the parameters of the elliptic
transfer trajectory that defines the heliocentric phase, which includes the
Hohmann velocity increments
where
2.2 Patched-Conic Approximation Based on the Gauss Problem
According to the Hohmann transfer in the previous section, the space vehicle
describes an elliptic heliocentric trajectory making a 180° arc in true anomaly
(the transfer ellipse is tangent simultaneously to the terminal orbits).
However, if it is desired to reach the SOI of Mars with a smaller travel time, a
smaller arc of true anomaly must be prescribed. In this way, the vectors of the
excess velocities must be obtained by another procedure. To achieve this goal,
the heliocentric phase is solved with the Gauss problem (also known as Lambert
problem1) Bate et al.(1971);
Battin et al.(1978); Prussing(1979), Battin and Vaughan(1984), Gooding(1990). To apply the Gauss problem, the magnitude of two
position vectors of the space vehicle must be provided, as well as the time of
flight and the true anomaly variation
Note that the Gauss problem is solved for a prescribed value of time of flight;
therefore, an optimization problem is enunciated below by setting the time of
flight as an unknown to be determined in order to obtain the solution with
minimum Gauss velocity increment
Problem 1
“Given the value of
An equivalent optimization problem can be also enunciated with a prescribed time
of flight by setting the true anomaly variation
Problem 2
“Given the value of time of flight, the direction of motion, and
prescribing the magnitudes of two position vectors (D
E
and
2.3 Patched-Conic Approximation with Detailed Geometry
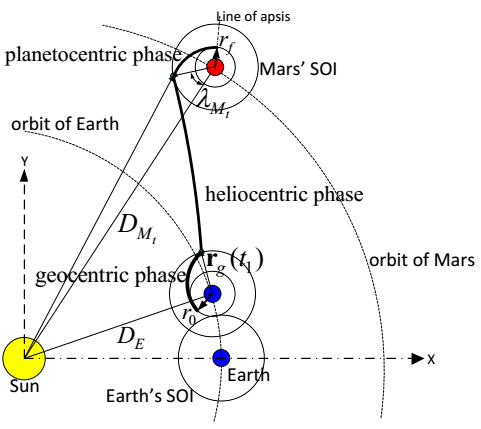
In the patched-conic approximation based on the Hohmann transfer and the one based on the Gauss problem, the heliocentric phase is first solved to determine the excess velocities. For these models, it is not possible to build the complete Earth-Mars trajectory without discontinuity between the points that connect the phases. This section shortly comments about a new patched-conic approximation in which the excess velocities are determined through a detailed geometry; it is based on an extension of the lunar patched-conic approximation, as described by Arthur Gagg Filho and da Silva Fernandes(2016). For this model, the geocentric phase is solved first, followed by the heliocentric phase, and finally, the planetocentric is determined. The inertial reference frame S XY is taken with the Sun at origin, the X-axis pointing towards Earth at the initial time, and with the Y-axis orthogonal to the X-axis according to Figure 1. Therefore, when the complete trajectory, Figure 1, is determined, one must compare the calculated arrival condition of the space vehicle with the prescribed arrival condition. In this way, the complete trajectory is obtained by solving a two-point boundary value problem (TPBVP) as enunciated below
Problem 3
“Given the terminal altitudes h
LEO
and
where
The velocity increments,
2.4 Patched-Conic Approximation with a Lunar Swing-by Maneuver
This patched-conic model is similar to the patched-conic approximation presented in § 2.3, but with two more phases in order to include a lunar swing-by maneuver, and with the inertial reference frame S XY centered on the Sun with the X-axis parallel to the Earth-Moon line at the initial time (see Figure 4). In this way, the complete trajectory is described by five phases: a first elliptic geocentric phase is characterized from the departure of the space vehicle from the LEO until it reaches the boundary of the Moon’s SOI; next, an hyperbolic selenocentric phase models the lunar swing-by maneuver; a second, but hyperbolic geocentric phase is defined from the departure from the Moon’s SOI until the reaching of the boundary of the Earth’s SOI; next, an elliptic heliocentric phase is defined from the departure of the Earth’s SOI until the space vehicle reaches the Mars’ SOI; finally, the hyperbolic planetocentric phase is characterized from the boundary of the Mars’ SOI until the arrival at the LM t O. The complete formulation of this patched-conic approximation can be found in Gagg Filho and da Silva Fernandes(2018). Since there is a lunar swing-by maneuver in this model, an intermediary constraint is included. This constraint defines the pericenter altitude of the selenocentrinc phase. Therefore, the TPBVP can be enunciated as it follows:
Problem 4
“Given the terminal altitudes h
LEO
and
and subject to the intermediary constraint:
Where r sP is the prescribed distance of close encounter with the Moon, and r pM is the calculated pericenter distance of the selenocentric phase.”
The velocity increments,
2.5 Interplanetary Transfer Problem Based on the Four-Body Problem
In this section, the interplanetary transfer problem based on the planar circular
restricted four-body problem (PCR4BP), in which the three primaries are the
Earth, the Sun and Mars, and the fourth body is the space vehicle, is
formulated. A mathematical development can be found in Miele and Wang(1999b), which utilizes polar coordinates to
formulate the problem; however, the present work formulates the differential
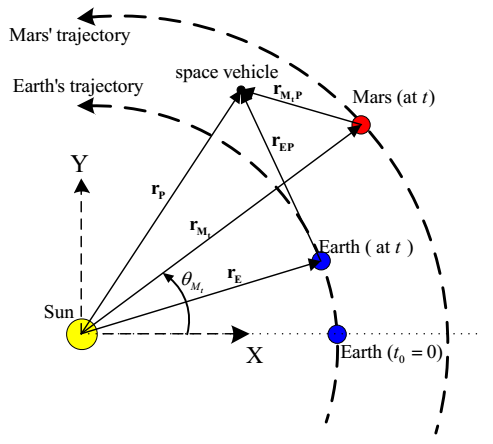
equations in Cartesian coordinates similar to Miele et al.(2004b). To solve the interplanetary transfer problem,
consider an inertial reference frame S
XY
centered on the Sun with the X-axis pointing to Earth at
the initial time
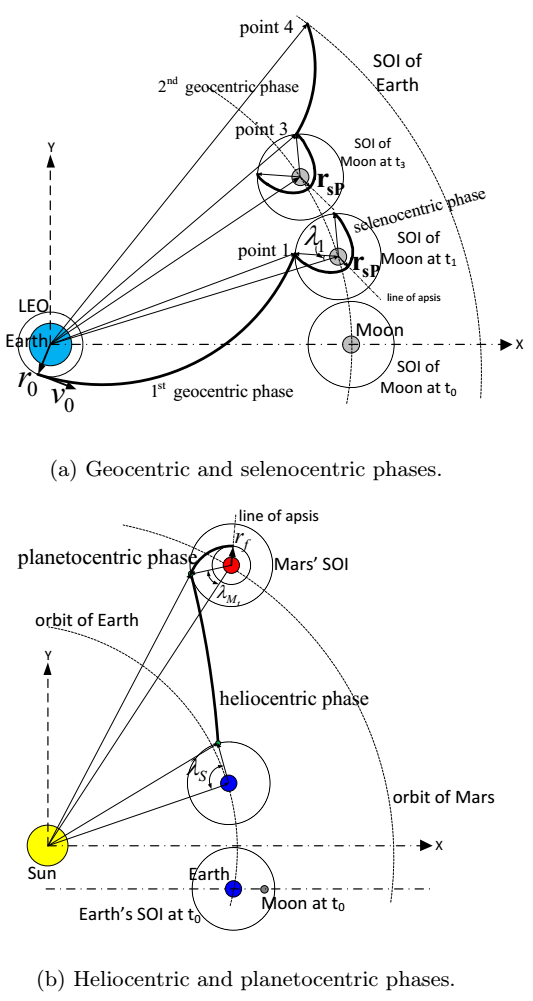
Fig. 2 Patched-conic approximation with swing-by. Modified from Gagg Filho and da Silva Fernandes (2018). The color figure can be viewed online.
2.5.1 Geocentric Phase
At the initial time, the space vehicle is at the LEO. After
applying the first velocity increment
where
where
Table 2 Planetary data
| Planet | Distance to the Sun (km) | Radial Distance (km) | Gravitational parameter |
Mean motion (rad/s) | SOI radius (km) |
|---|---|---|---|---|---|
| Venus[1] | 1.0815 × 108 | 6051.8 | 32.4776 × 104 | 3.23861161 × 10-7 | 615976.52 |
| Earth[2] | 1.4960 × 108 | 6378.2 | 39.8600 × 104 | 1.99177621 × 10-7 | 923502.24 |
| Mars[2] | 2.2790 × 108 | 3397.0 | 4.2830 × 104 | 1.05850987 × 10-7 | 577723.87 |
[1]Calculated distance from the data of JPL/NASA.
[2]Calculated distance from the data found in Miele and Wang(1999b).
The time derivative expressions of equations 10 - 13 provide the velocity vector components:
Initial Conditions
The initial conditions that define the beginning of integration of the
differential equation system (equations 8 and 9), are given by the
components of the position and velocity vectors of the space vehicle with
respect to Earth at t
0, i.e, at the time right after the application of
where
The numerical integration of equations 8 and 9 is performed from t = t 0 to t = t 1, at which the following constraint becomes true:
where R
ST
is the radius of the SOI of the Earth. The heliocentric phase
initiates when the constraint
2.5.2 Heliocentric Phase
In this phase, the gravitational field of the Sun is predominant and it initiates when the space vehicle leaves the Earth’s SOI. In this way, the system of differential equations that describes the motion of the space vehicle is written with its position and velocity vectors with respect to the inertial frame as following:
where
Initial Conditions
The initial conditions of the system defined by equations (23) and (24) are the components of the position and velocity vectors of the space vehicle with respect to Sun at time t 1. In this way, one has
For the calculation of these initial conditions it is enough to determine the components of the position and velocity vectors of the Earth at t 1 by utilizing equations 10, 11, 14 and 15; and to utilize the components of position and velocity vectors of the space vehicle with respect to Earth at t 1, which are provided as the state variables by the end of the integration of the geocentric phase. Once the initial conditions are established, the differential equation system, equations 23 and 24, is integrated from t = t 1 to t = t 2,, when the space vehicle reaches the boundary of the SOI of Mars (or Venus) defined by the following constraint:
where
2.5.3 Planetocentric Phase
The planetocentric phase initiates when the space vehicle reaches the boundary of Mars’ SOI; thus, the gravitational field of Mars becomes predominant. The system of differential equations is expressed with the components of the position and velocity vectors of the space vehicle with respect to Mars as below:
where
Initial Conditions
The initial conditions of the system defined by equations (30) and (31) are the components of the position and velocity vectors of the space vehicle to Mars at time t 2. These components are expressed by:
For the calculation of these initial conditions it is enough to determine the components of the position and velocity vectors of Mars at t 2 by utilizing equations 12, 13, 16 and 17; and to utilize the components of position and velocity vectors of the space vehicle with respect to Sun at t 2, which are provided as the state variables by the end of the integration of the heliocentric phase. Once the initial conditions are established, the differential equation system, equations (30) and (31), is integrated from t = t 2 to t = T, the moment right before the application of the second velocity increment that circularizes the space vehicle in the low orbit of the destiny planet according to the final constraints. Note that, in order to switch between the phases, the position vector of the primaries must be monitored.
2.5.4 Two-Point Boundary Value Problem
According to § 2.5.1 and § 2.5.3, one can determine the trajectory by integrating the system of differential equations of each phase if the initial conditions of equations (8) and (9) are given. However, the final conditions must agree with the terminal constraints at the LM t O. Therefore, a TPBVP is enunciated as it follows:
Problem 5
“Given the terminal altitudes h
LEO
and
where the upper (lower) sign in equation (38) indicates a clockwise (counterclockwise) arrival at the LMtO. This problem is solved by means of the Newton-Raphson algorithm.
Note also that the angles
2.5.5 One-Degree of Freedom Optimization Problem
If there is a solution of the TPBVP for each value of
Problem 6
“Given the terminal altitudes h
LEO
and
subject to the final constraints g 1 , g 2 and g 3 defined by equations (36), (37) and (38), respectively. ”
2.5.6 Two-Degree of Freedom Optimization Problem
According to Problem 5, the phase angles
Problem 7
“Given the terminal altitudes h
LEO
and
subject to the final constraints g 1 , g 2 and g 3 defined by equations (36), (37) and (38), respectively.”
2.6 Interplanetary Transfer Problem Based on the Five-Body Problem
This model extends the formulation of the interplanetary transfer based on the PCR4BP (§2.5) by including a lunar swing-by maneuver. In this sense the system of differential equations of the geocentric phase, equations (8) and (9), is modified by adding the gravitational attraction of the Moon, converting the PCR4BP into a planar circular restricted five-body problem (PCR5BP). Thus, the new system of differential equations that describes the motion of the space vehicle at the neighborhood of Earth is described as below:
where
The Earth-Moon mean distance is denoted by D
M
in equations 43 and 44,
When the space vehicle leaves the Earth’s SOI, the system of differential equation must be rewritten with the position vector of the space vehicle with respect to Sun in a similar way to equations (41) and (42). In the same way, when the space vehicle enters the SOI of the destiny planet, another system of differential equations is used with the position vector of the space vehicle with respect to the destiny planet. To simplify numerical computation, the gravitational field of the Moon is neglected in the heliocentric and planetocentric phases. If the initial condition for the integration of the equations of motion (equations 41 and 42 ) is accurate enough, the lunar swing-by maneuver will occur naturally; therefore, there is no intermediary constraint that defines the swing-by maneuver.
2.6.1 The Two-Point Boundary Value Problem (TPBVP)
The TPBVP of this interplanetary transfer problem is similar to the one based
on the four-body problem, but with an additional parameter: the initial
phase angle of the Moon
Problem 8
“Given the terminal altitudes h
LEO
and
Note that an optimization problem of two-degree of freedom is also formulated
as Problem 7 but with
Problem 9
“Given the terminal altitudes h
LEO
and
subject to the final constraints g 1 , g 2 and g 3 defined by equations (36), (37) and (38), respectively.”
3 Results
This section is divided in two topics. The first one presents results about interplanetary missions without a lunar swing-by maneuver. The second one presents interplanetary missions with an intermediary lunar swing-by maneuver. In the first part, a study is performed by solving TPBVPs by using the interplanetary patched-conic approximations and the model based on the PCR4BP. Next, the one and the two-degree of freedom optimization problems are solved in the context of the PCR4BP to determine the optimal trajectories. Penalties on the fuel consumption are quantified if the space vehicle does not depart specifically from the optimal geometry. In the second part, the trajectories determined by the patched-conic approximation are utilized as an initial guesses to solve the TPBVP (Problem 8) based on the PCR5BP. By using this last solution, the three-degree optimization problem is solved to determine the optimal interplanetary trajectories with a lunar swing-by maneuver in the context of the PCR5BP.
All the TPBVPs are solved by means of a Newton-Raphson algorithm Press et al.(1997), and the optimization problems are solved by means of the Sequential Gradient Restoration Algorithm Miele et al.(1969). The computational codes are implemented using FORTRAN 90.
3.1 Interplanetary Missions Without Swing-by Maneuver
This section studies interplanetary missions without a lunar swing-by maneuver.
For this study, the patched-conic with detailed geometry, § 2.3, and the problem
based on the four-body problem, § 2.5, are used. An inner transfer, Earth-Venus,
and an outer transfer, Earth-Mars, are utilized to exemplify the results. The
terminal altitudes are:
3.1.1 Interplanetary Patched-Conic Approximations
According to Problem 3, the TPBVP is solved by setting two parameters:
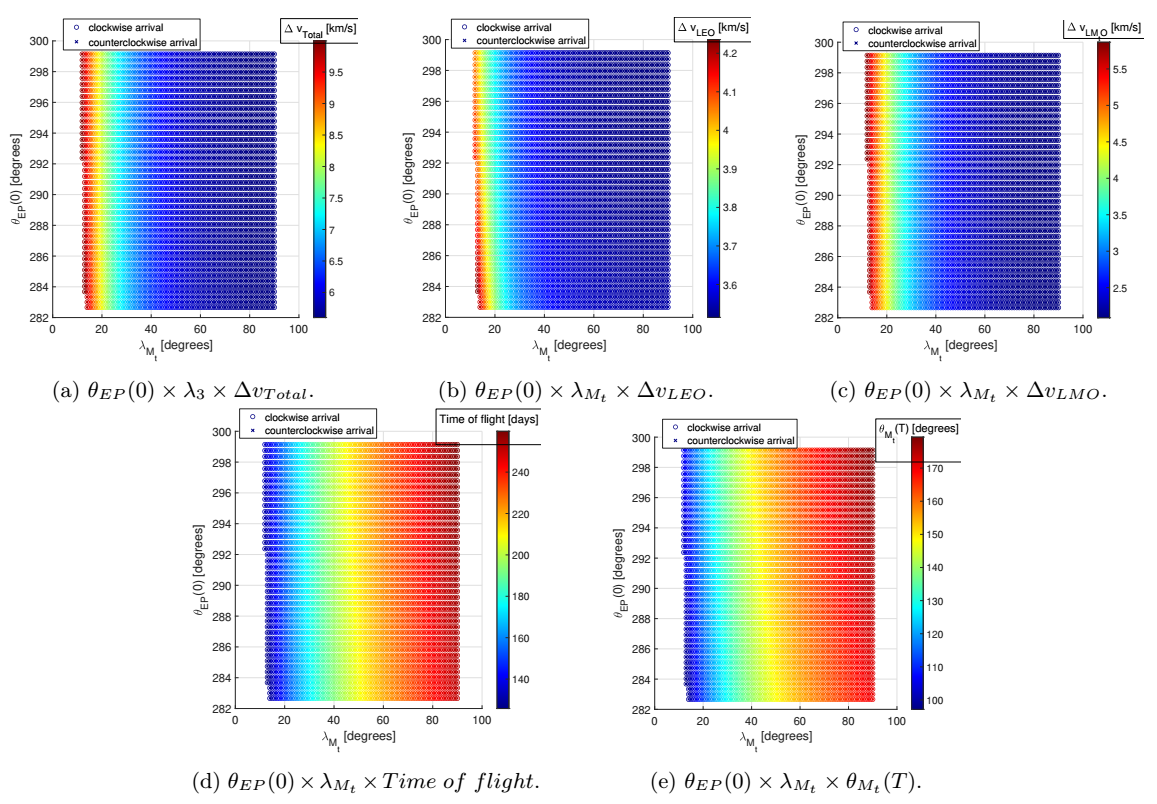
Fig. 4 Main parameters of the patched-conic approximation with detailed geometry. Earth-Mars mission. The color figure can be viewed online.
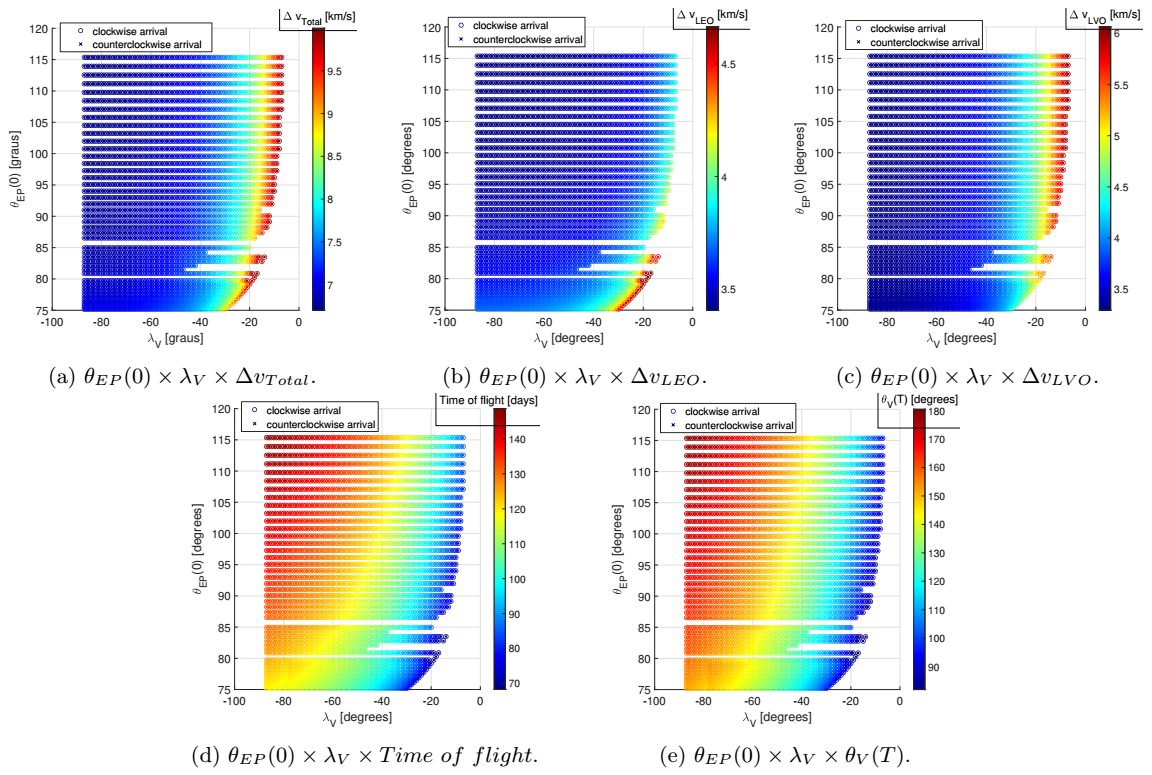
Fig. 5 Main parameters of the patched-conic approximation with detailed geometry. Earth-Venus mission. The color figure can be viewed online.
The model based on the interplanetary patched-conic approximation with
detailed geometry also sets the motion direction at the final terminal orbit
(LM
t
O or LVO) which can be clockwise or
counterclockwise. In terms of fuel consumption, the motion direction almost
does not change the velocity increments for the Earth-Mars mission (Figures 4a-4c). In fact, the results of
both direction are overlapping each other in these figures. The same occurs
for the Earth-Venus mission (Figures
5a-5c). Moreover, the phase angles
Table 3 Main parameters for the smallest fuel consumption trajectories for Earth-Mars mission
| Model |
|
|
|
Time of Flight (days) |
|
|
|---|---|---|---|---|---|---|
| PCR4BP[1] | 3.551905 | 2.100124 | 5.652029 | 257.861 | 179.075 | 298.382 |
| Miele[2] | 3.552000 | 2.100000 | 5.652000 | 257.880 | 179.020 | 298.150 |
| Patched-conic | ||||||
| based on Hohmann | -2* 3.555746 | -2*2.101260 | -2*5.657006 | -2*264.430 | -2*182.928 | -2*299.474 |
| Patched-conic | ||||||
| based on Gauss | -2*3.555572 | -2*2.101454 | -2*5.657026 | -2*263.579 | -2*182.429 | -2*299.139 |
| Patched-conic | ||||||
| detailed geometry[3] | -2*3.514668 | -2*2.087434 | -2*5.602101 | -2*257.965 | -2*179.353 | -2*297.573 |
[1]Results from a two degree-of-freedom optimization problem.
[2]Results based on the PR4CP calculated by Miele and Wang(1999)
[3]Smallest fuel consumption trajectory found for
Table 4 Main parameters for the smallest fuel consumption trajectories for Earth-Venus mission
| Model |
|
|
|
Time of Flight (days) |
|
|
|---|---|---|---|---|---|---|
| PCR4BP[1] | 3.449138 | 3.337284 | 6.786422 | 139.628 | 173.795 | 105.084 |
| Patched-conic | ||||||
| based on Hohmann | -2* 3.447245 | -2*3.339810 | -2*6.787055 | -2*151.822 | -2*189.273 | -2*115.420 |
| Patched-conic | ||||||
| based on Gauss | -2*3.447417 | -2*3.339550 | -2*6.786967 | -2*151.771 | -2*189.197 | -2*115.355 |
| Patched-conic | ||||||
| detailed geometry [2] | -2*3.406312 | -2*3.294024 | -2*6.700336 | -2*147.976 | -2*183.519 | -2*113.934 |
[1]Results from a two degree-of-freedom optimization problem.
[2] Smallest fuel consumption trajectory found for
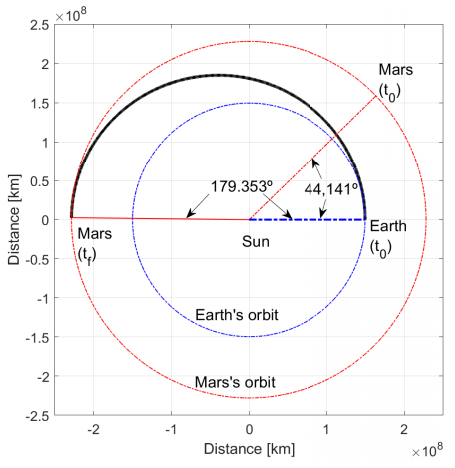
Fig. 6 Smallest fuel consumption trajectory for an Earth-Mars mission based on the patched-conic approximation. Arrival ahead the SOI of Mars. The color figure can be viewed online.
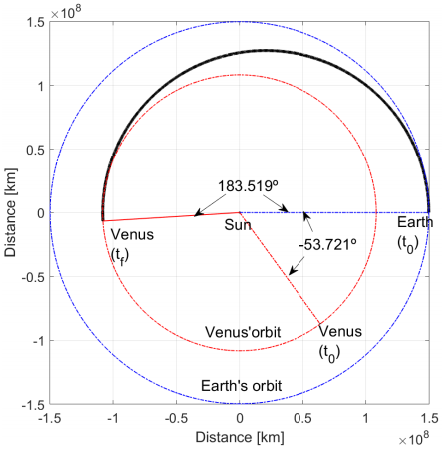
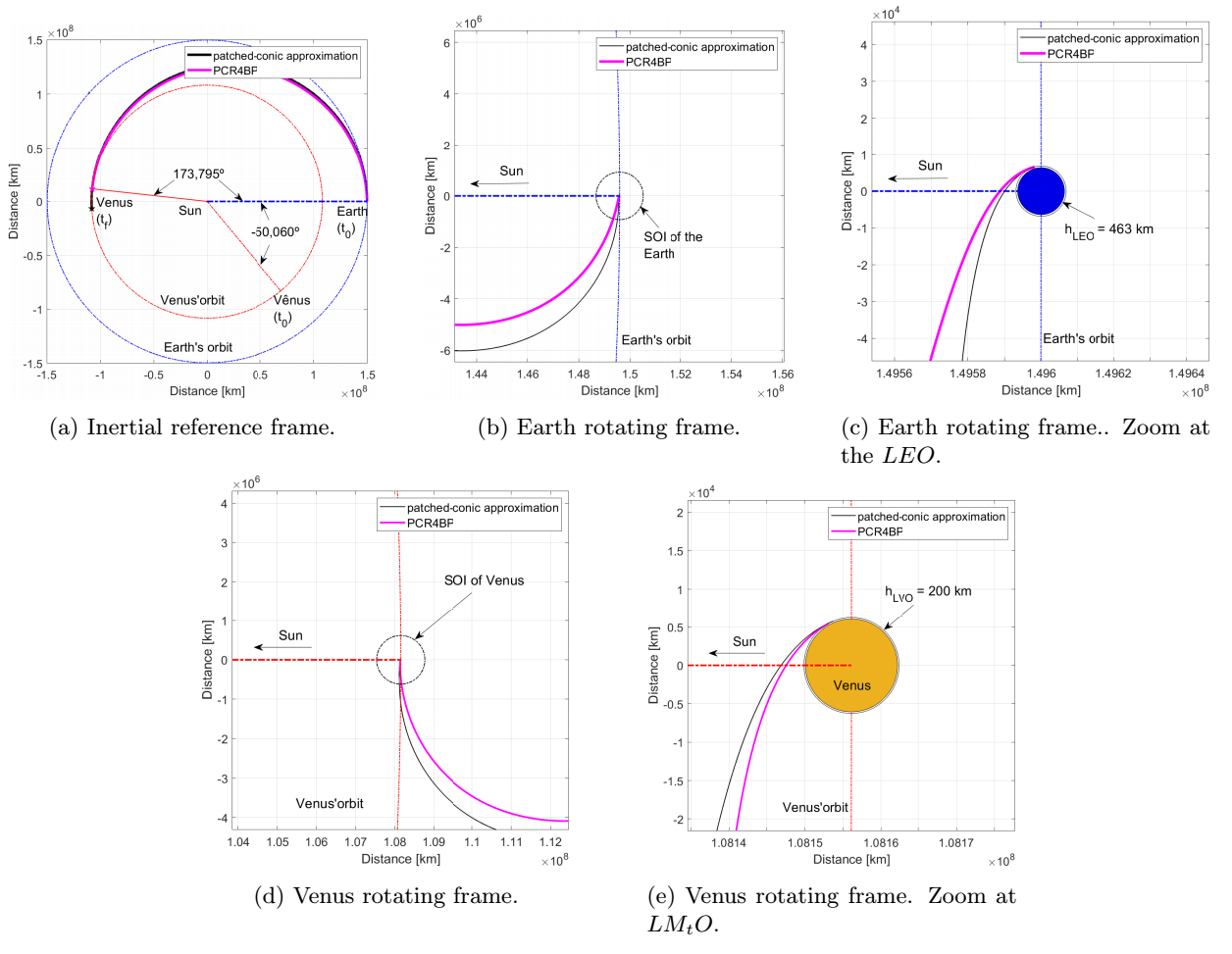
Fig. 7 Smallest fuel consumption trajectory for an Earth-Venus mission based on the patched-conic approximation. Arrival behind the SOI of Venus. The color figure can be viewed online.
Note that for all the trajectories with the smallest fuel consumption, the
arrival at the SOI of the destiny planet is nearly parallel to the orbital
motion of the destiny planet around the Sun; thus, the angles
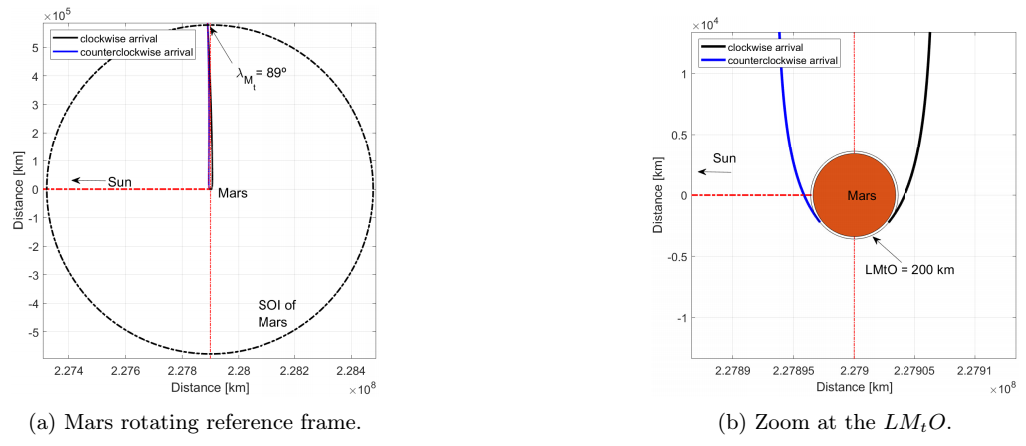
Fig. 8 Smallest fuel consumption trajectories with clockwise and counterclockwise arrivals at the LMt O. The color figure can be viewed online.
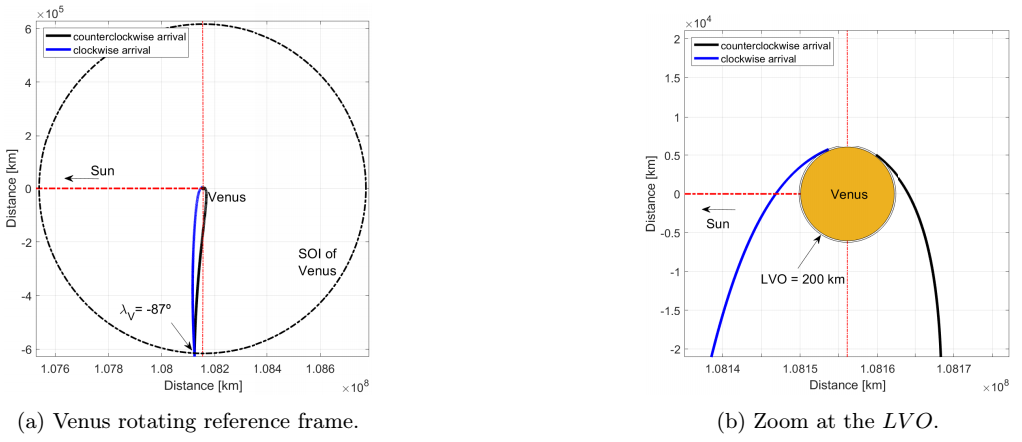
Fig. 9 Smallest fuel consumption trajectories with clockwise and counterclockwise arrivals at the LV O. The color figure can be viewed online.
Therefore, in a real navigation problem for both Earth-Mars and Earth-Venus missions, one can define the direction of arrival at the final orbit when the space vehicle reaches the boundary of the SOI of the target planet because the clockwise and counterclockwise arrival trajectories are very close to each other.
Table 3 also shows the good agreement
between the results for the smallest fuel consumption trajectory computed
by: the patched-conic approximation; the optimal trajectory obtained by
solving Problem 7 which is based on the PCR4BP; and the optimal results
determined by Miele and Wang(1999b)
for the Earth-Mars mission. Also, Tables
3 and 4 highlight the
optimal results of the patched-conic based on the Gauss problem (Problem 2)
and the results of the patched-conic based on the Hohmann transfer. For
these last two models, the velocity increments are more compatible with the
results provided by Miele and
Wang(1999b) for the Earth-Mars mission (Table 3); however, a larger discrepancy occurs in the
time of flight, which is 6 to 7 days longer than the one calculated by the
PCR4BP. The detailed patched-conic approximation, on the other hand,
presents values of time of flight, final phase angle
In the Venus mission, the discrepancy of the time of flight is even greater,
reaching 12 to 13 days when one compares the patched-conic based on Gauss or
based the Hohmann transfer with the model based on the PCR4BP. Similar to
the Earth-Mars mission, the detailed patched-conic approximation for the
Earth-Venus mission presents values of time of flight, final phase angle
Therefore, even though the patched-conic approximation with detailed geometry presents a fuel consumption slightly different from the other models, it presents more detailed and accurate geometric information than the other patched-conic approximations (based on Gauss and based on the Hohmann transfer) allowing the visualization of the complete trajectory without discontinuity and with a time of flight compatible with the trajectory based on the PCR4BP. Moreover, one can include swing-by maneuver in this patched-conic approximation, whose results are presented later in this work.
3.1.2 Planar Circular Restricted Three-Body Problem
By now, one can use this patched-conic approximation to provide initial
guesses for Problem 5 based on the PCR4BP. In this way, Figures 10 and 11
plot the fuel consumption determined by the TPBVP (Problem 5) considering
several sets of
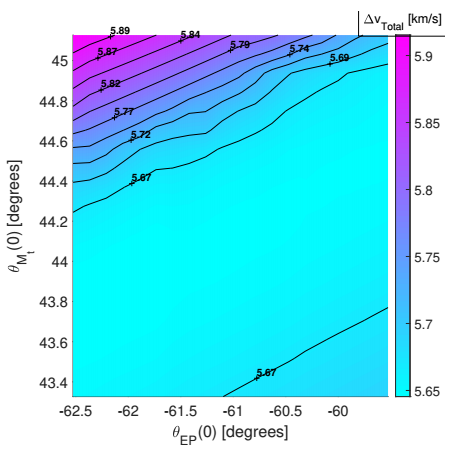
Fig. 10 Results of the TPBVP based on the PCR4BP for the Earth-Mars mission. The color figure can be viewed online.
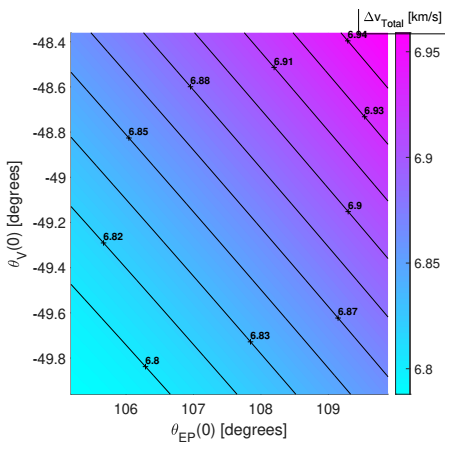
Fig. 11 Results of the TPBVP based on the PCR4BP for the Earth-Venus mission. The color figure can be viewed online.
Figures 10 and 11 illustrate interpolated surfaces in which the
results of Problem 5 are found, and, where one can observe that there is a
minimum
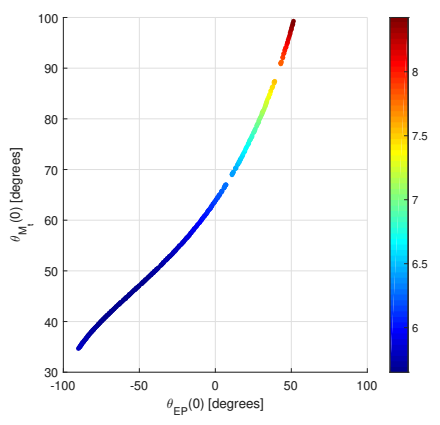
Fig. 12 Optimal curve θ EP (0) × θ Mt (0). Earth-Mars mission. The color figure can be viewed online.
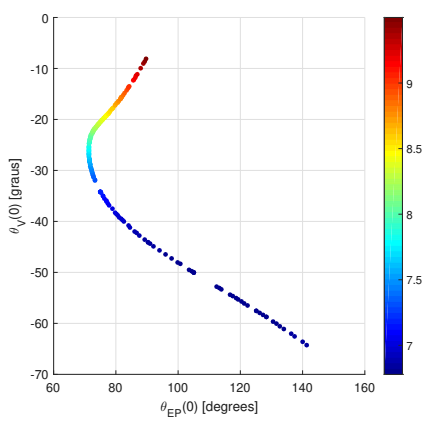
Fig. 13 Optimal curve θ EP (0) × θ Vt (0). Earth-Venus mission. The color figure can be viewed online.
Indeed, the rendezvous angles
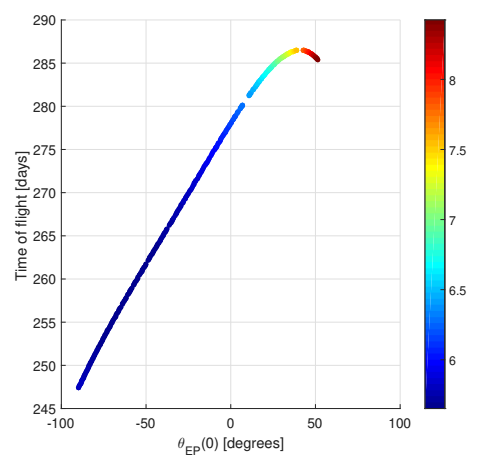
Fig. 14 Optimal curve θ EP (0) ×Time of flight. Earth-Mars mission. The color figure can be viewed online.
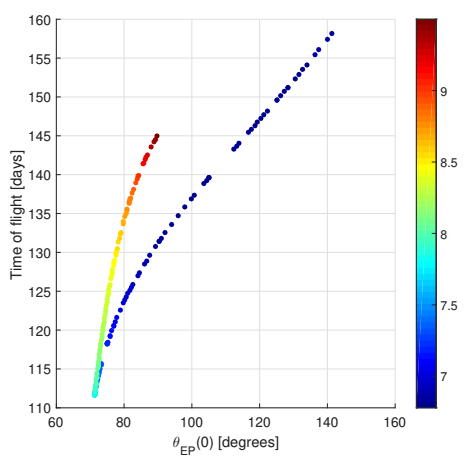
Fig. 15 Optimal curve θ EP (0) ×Time of flight. Earth-Venus mission. The color figure can be viewed online.
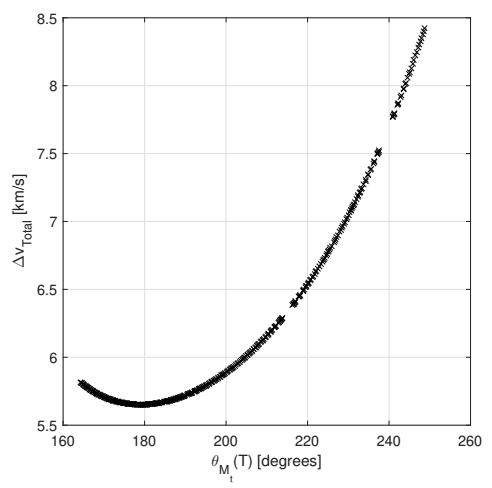
Fig. 16 Optimal curve θ Mt (T) × ∆v Total . Earth-Mars mission. The color figure can be viewed online.
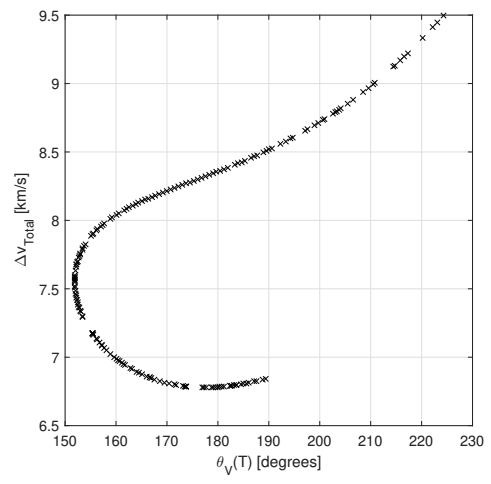
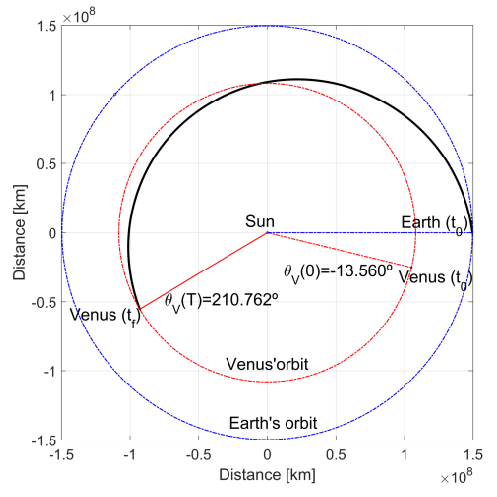
Figure 18: Earth-Venus mission. Time of flight = 139.917 days,
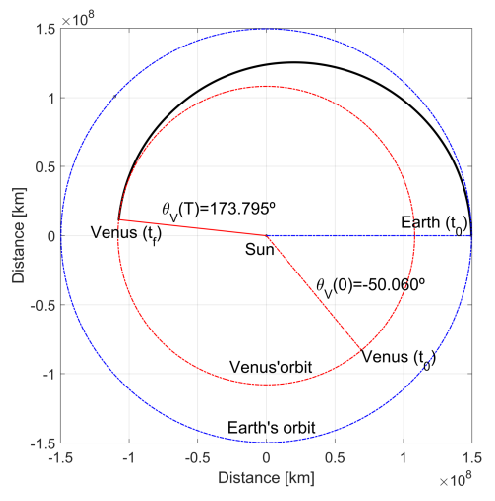
Figure 19: Earth-Venus mission. Time of flight = 139.628 days,
Note in Figure 6 that the value of the
initial phase angle for the outer transfer means that the destiny planet is
ahead of Earth (
The result of Problem 7 (based on the PCR4BP) for the Earth-Mars mission
(Table 3) practically coincides
with the result found by Miele and
Wang(1999b), and it presents the optimal
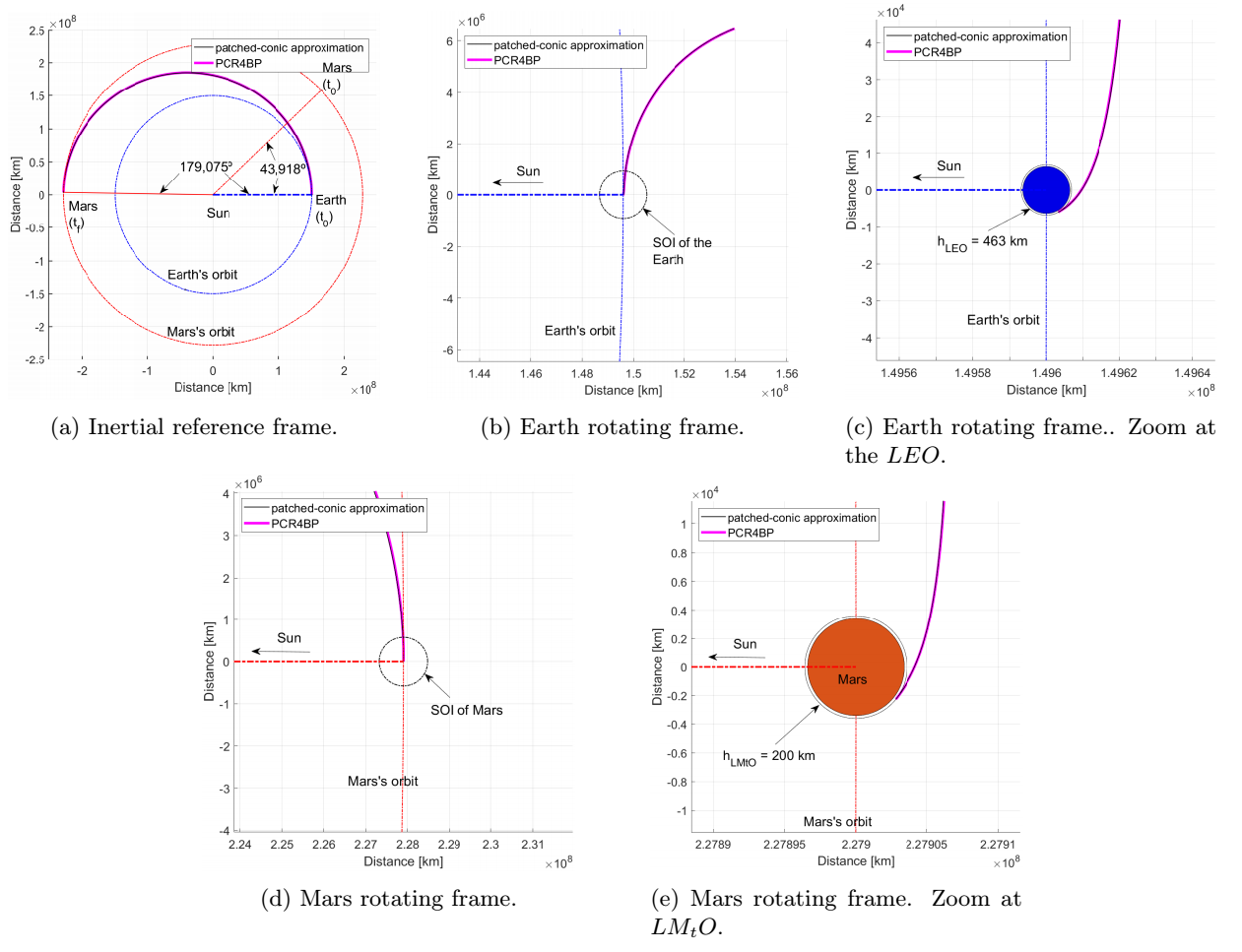
Figure 20: Optimal Earth-Venus trajectory. Phase angles are computed by PCR4BP. The color figure can be viewed online.
3.1.3 Penalty on Fuel Consumption
For more realistic models, in which one uses the ephemeris of the celestial
bodies, it is not possible to find the proper geometrical set of the bodies
in a given epoch that corresponds to the geometrical set of minimum fuel
consumption determined by Problem 7 (two-degree of freedom optimization
problem based on the PCR4BP). In this case, one can perform a correspondence
of the geometrical set given by the ephemeris with a geometrical set
determined by Problem 6 (one-degree of freedom optimization problem) by
adjusting the initial phase angle of the destiny planet (rendezvous angle)
in this last Problem. In this way, a penalty in the fuel consumption can be
determined due to the deviations from the geometrical set determined by the
two-degree of freedom optimization problem. Figures 22a and 22b show
the penalty in
1. Positive values of
2. Both delayed and early departures in both missions increase the fuel consumption: an early departure corresponding to a change in the rendezvous angle of 40° in the Earth-Mars mission increases
3. The early departures for the Earth-Mars mission (
4. Delaying the departure for both Earth-Mars and Earth-Venus mission decreases the time of flight; however, there is a delayed departure that minimizes the time of flight in the Earth-Venus mission. Observe in Table 6 that a delayed departure corresponding to a variation of the rendezvous angle of 15° for the Earth-Venus mission decreases the time of flight by 20.312 days with a penalty on
5. The launch window, which is defined by the change in
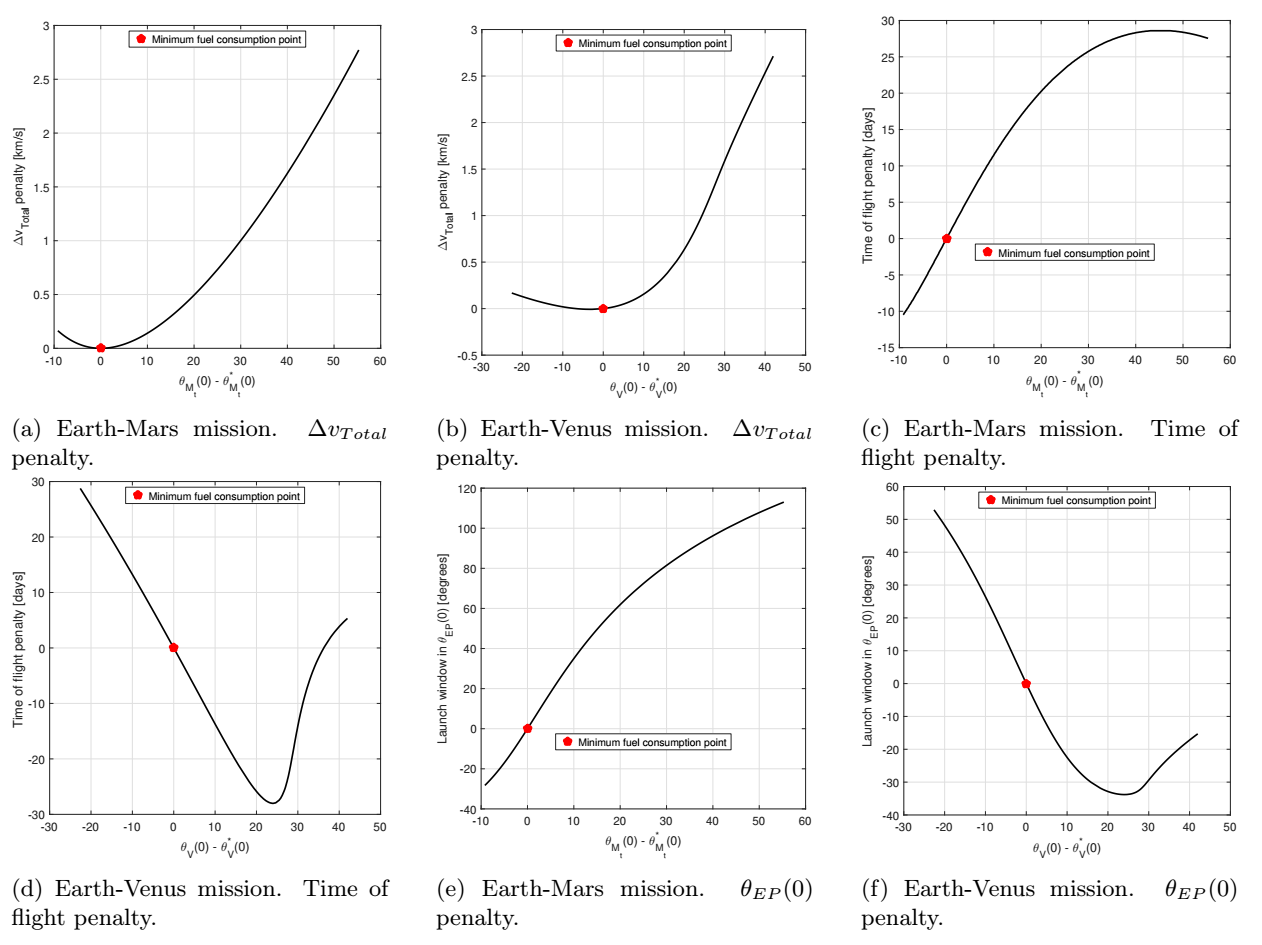
Fig. 22 Penalty in the main parameters with respect to minimum fuel consumption trajectory (Problem 7). The color figure can be viewed online.
Table 5: Penalty in the main parameters due to early and delayed departures. Earth-Mars mission
|
|
(-)9.0° |
|
(+)15.0 | (+)30.0° | (+)40.0° |
|---|---|---|---|---|---|
|
|
(+)0.123037 | 3.551905 | (+)0.240781 | (+)0.800470 | (+)1.306203 |
|
|
(+)0.036667 | 2.100124 | (+)0.058534 | (+)0.200583 | (+)0.340452 |
|
|
(+)0.159705 | 5.652029 | (+)0.299315 | (+)1.001053 | (+)1.646655 |
| Time (days) | (-)10.417 | 257.861 | (+)16.377 | (+)25.752 | (+)28.356 |
|
|
(-)28.055 | 298.382 | (+)49.801 | (+)81.454 | (+)96.600 |
Table 6: Penalty in the main parameters due to early and delayed departures. Earth-Venus mission
|
|
(-)9.0° |
|
(+)15.0° | (+)30.0° | (+)40.0° |
|---|---|---|---|---|---|
|
|
(+)0.013842 | 3.449138 | (+)0.278435 | (+)0.752205 | (+)0.643154 |
|
|
(+)0.002513 | 3.337284 | (+)0.063947 | (+)0.835651 | (+)1.901170 |
|
|
(+)0.016355 | 6.786422 | (+)0.342381 | (+)1.587856 | (+)2.544324 |
| Time (days) | (+)12.731 | 139.628 | (-)20.312 | (-)14.062 | (+)3.935 |
|
|
(+)25.454 | 105.084 | (-)29.212 | (-)29.382 | (-)17.101 |
In general, by observing Figures 22,
delayed and early departures increase the fuel consumption (Figures 22a and 22b) in both missions; however, the minimum fuel
consumption solution for the Earth-Venus mission lies on a flatter region of
the
The penalty on the main parameters for the Earth-Mars mission was also
observed by Miele and Wang(1999);
part of their results are given in Table
7. A good agreement is observed between the results of Table 5 and the ones of Table 7. This fact is better observed
in the columns with
Table 7 Penalty in the main parameters due to early and delayed departures (Miele & Wang 1999 b). Earth-Mars mission
|
|
(-) 14.86° |
|
(+)15.14° | (+)30.14° |
|---|---|---|---|---|
|
|
(+)0.341 | 3.552 | (+)0.240 | (+)0.803 |
|
|
(+)0.127 | 2.100 | (+)0.058 | (+)0.201 |
|
|
(+)0.468 | 5.652 | (+)0.298 | (+)1.004 |
| Time (days) | (-)13.29 | 257.88 | (+)16.48 | (+)25.74 |
|
|
(-)37.73 | 298.15 | (+)49.97 | (+)81.80 |
The next section studies the possibility of saving fuel consumption without increasing significantly the time of flight for both missions, Earth-Mars and Earth-Venus, by including a lunar swing-by maneuver.
3.2 Interplanetary Missions with Swing-by Maneuver
Firstly, this section studies the solutions of interplanetary trajectories for Earth-Mars and Earth-Venus missions by solving only the TPBVPs with a lunar swing-by maneuver (Problems 4 and 8). Next, the optimal solutions of the three-degree of freedom optimization problem (Problem 9) are presented.
3.2.1 Non-Optimal Solutions
Tables 8 and 9 compare the interplanetary trajectories for Earth-Mars and Earth-Venus missions with lunar swing-by maneuvers. The results of the patched-conic approximation with detailed geometry (Problem 4) that includes a lunar swing-by maneuver, Table 8, have already explained by Gagg Filho and da Silva Fernandes(2018). These results are used as initial guess to solve the TPBVP defined by Problem 8 in the context of the PCR5BP, which is highlighted in Table 9. In this last model, the gravitational attraction of the Moon is neglected during the interplanetary and planetocentric phases. If the initial condition for Problem 8 is accurate enough, the lunar swing-by maneuver will occur naturally during the integration of the equations of motion (equations 41 and 42).
Table 8: Minimum fuel consumption solution*
| Parameter | Earth-Mars | Earth-Venus |
|---|---|---|
|
|
3.362211 | 3.376566 |
|
|
2.086891 | 3.289849 |
|
|
5.449101 | 6.666415 |
| Time of flight (days) | 257.443 | 149.440 |
|
|
-46.188 | 86.040 |
| Rendezvous angle (degrees) | 43.368 | -56.269 |
|
|
132.079 | 269.358 |
| hsP (km) | 1400.0 | 9100.0 |
|
|
-141.035 | -151.321 |
|
|
-17.0 | 4.0 |
|
|
91.845 | 90.170 |
|
|
90.0 | -90.0 |
*Patched-conic approximation with a lunar swing-by maneuver.
Table 9: Solution for interplanetary missions*
| Parameters | Earth-Mars | Earth-Venus |
|---|---|---|
|
|
3.469766 | 3.426035 |
|
|
2.101053 | 3.464753 |
|
|
5.570819 | 6.890788 |
| Time of flight (days) | 257.443 | 142.697 |
|
|
0.0 | 0.0 |
| Rendezvous angles (degrees) | 41.605566 | -42.836 |
|
|
176.544391 | 185.939 |
|
|
-88.194 | 76.505 |
|
|
43.940 | 209.472 |
*With lunar swing-by maneuver in the context of the PCR5BP.
By comparing both models that include the lunar swing-by maneuver, i.e., the
patched-conic approximation and the PCR5BP, a difference is observed between
the results of Table 8 and Table 9: the patched-conic
approximation presents a fuel consumption,
In the context of the patched-conic approximation, the Earth-Mars mission with a lunar swing-by (Table 8) shows a saving of fuel consumption of 153 m/s with approximately the same time of flight as the one of the patched-conic without lunar swing-by maneuver; and the Earth-Venus mission presents a saving of fuel consumption of 33.21 m/s with a time of flight only 1.5 days larger than the one of the patched-conic without lunar swing-by maneuver. The results in the context of the PCR5BP only reinforce these remarks: the Earth-Mars mission with lunar swing-by shows a saving of fuel consumption of 81.21 m/s with a time of flight only 0.418 days smaller than the mission without lunar swing-by maneuver (PCR4BP); and the Earth-Venus mission with lunar swing-by presents a fuel consumption of 104.366 m/s smaller than the one without swing-by maneuver (PCR4BP) with a time of flight only 1.931 days larger than the mission without lunar swing-by maneuver.
This comparison using Table (8) and Table (9) is limited because, even considering different models, they do not shown exactly the same trajectory. The only correspondence between Tables (8) and Table (9) is that the result of trajectory of Table (8) is used to glimpse an initial guess to solve the TPBVP (Problem 8), whose solutions are presented in Table (9). During the convergence of the algorithm that solves this TPBVP, the solution can move away from the initial guess. A better comparison can be made if an optimization problem is solved considering both models; however, the intention of this paper is to illustrate that the patched-conic approximation with lunar swing-by maneuver can be well utilized as an initial guess for the model based on the PCR5BP. Since the objective of this paper is also to study the saving of fuel consumption due to the lunar swing-by maneuver on interplanetary missions, and, considering that there is a potential of saving fuel consumption as illustrated in Table (9), the optimization problem with a three-degree of freedom is conducted to obtain more solid conclusions.
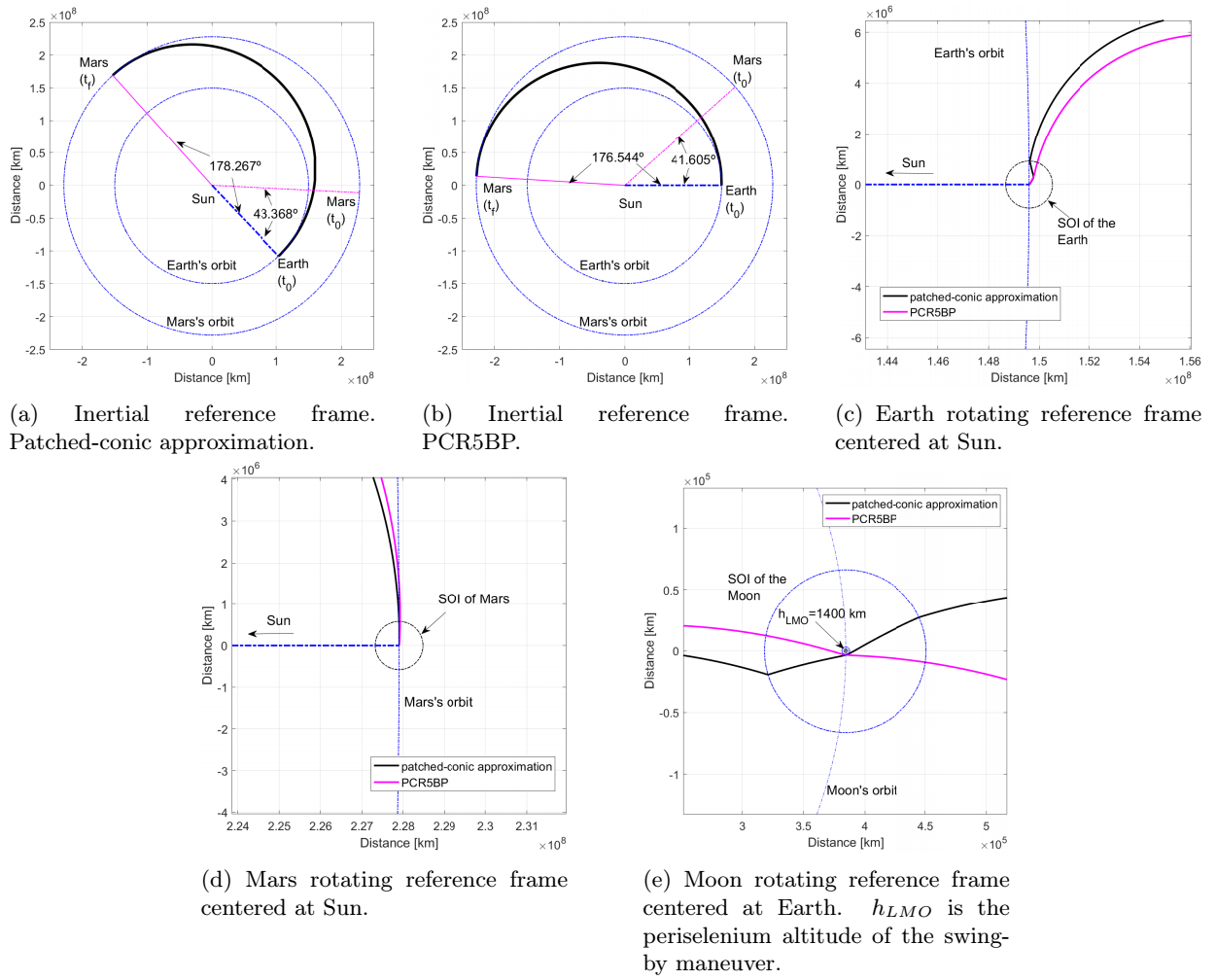
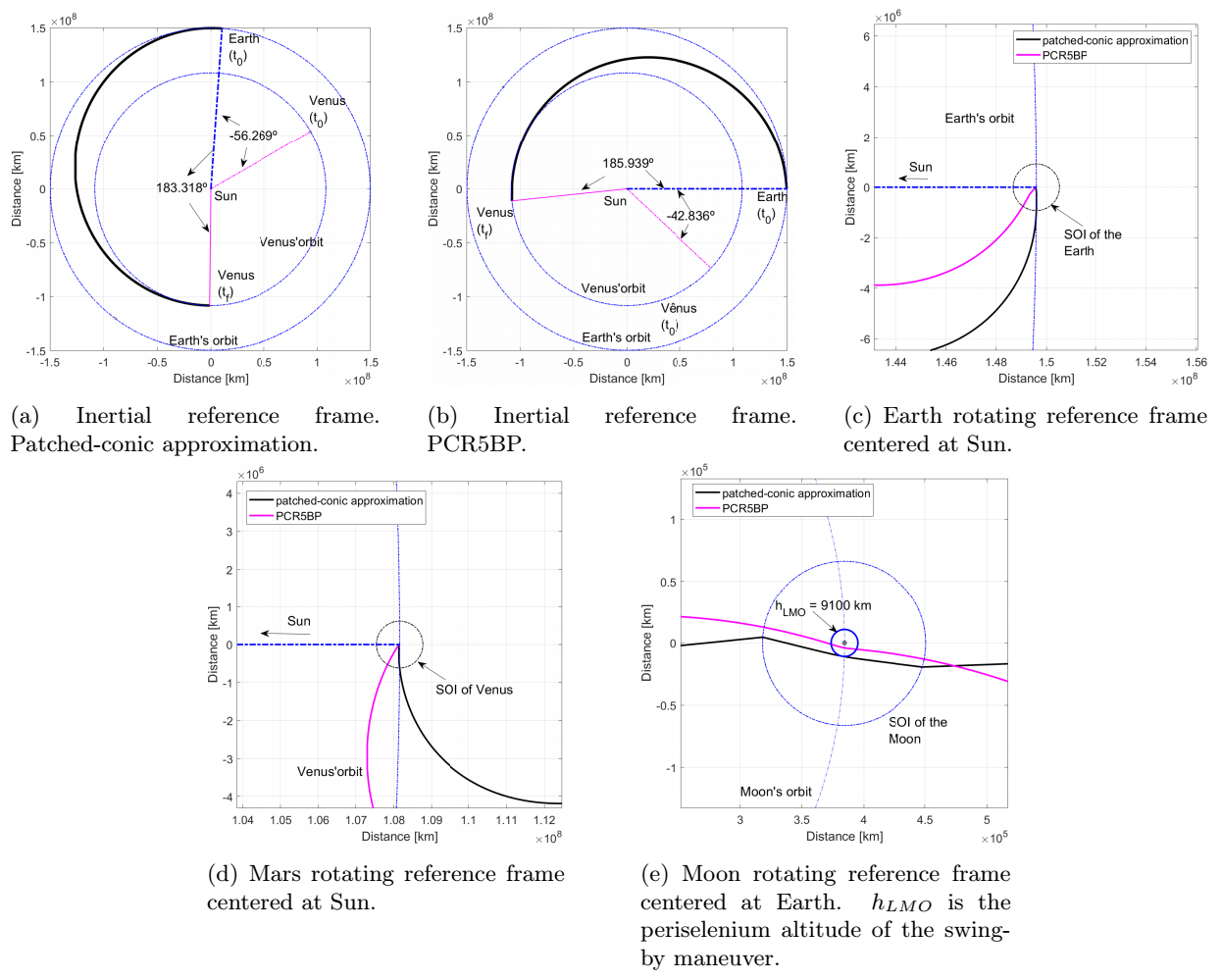
Figures 23 and 24 plot the trajectories described by Tables 4 and 5. Since the trajectories based on the PCR5BP are obtained by solving Problem 8, there is no intermediary constraint that defines the swing-by maneuver, which appears naturally from the integration of the equations of motion. Due to this absence of an intermediary constraint on the PCR5BP and due to the dynamic difference of the models, the swing-by maneuver can be changed by the Newton-Raphson method in order to converge. In other words, since there is no intermediary constraint prescribing the lunar swing-by maneuver, the Newton-Raphson method does not take into consideration what happens during the trajectory as long as the final constraints are satisfied, so the occurrence of the lunar swing-by maneuver on the PCR5BP essentially depends on the initial guess that defines the departure at the LEO.
This fact is better visualized on the Earth-Venus mission, Figure 23e, where the space vehicle performs a lunar swing-by maneuver in the context of the PCR5BP with a periselenium altitude smaller than the one of the patched-conic approximation. On the other hand, for the Earth-Mars mission, the initial guess for solving Problem 8 is so accurate that the periselenium altitude of the lunar swing-by maneuver based on the PCR5BP practically coincides with the prescribed altitude of the patched-conic approximation (Figure 24e); however, an overview of the complete trajectory (Figure 23a and Figure 23b), departure geometry (Figure 23c), and arrival geometry (Figure 23d) reveal that the shapes of the trajectories are different. A disagreement between the trajectories of different models is also observed for the Earth-Venus mission (Figure 24). Indeed, these differences are already expected, as explained before by Tables 8 and 9. For both missions, the visualization of trajectories in the inertial reference frame centered at the Sun of both models must be done in distinct figures since the x-axis of the inertial reference frame is not the same: the x-axis of the inertial reference frame used in context of the PCR5BP (Figure 23b and Figure 24b) is the Sun-Earth direction at t = t 0; on the other hand, the x-axis of the inertial reference frame used for the patched-conic approximation with lunar swing-by (Figure 23a and Figure 24a) is parallel to the direction Earth-Moon at t = t 0. Therefore, the comparison of the trajectories is performed by considering the relative positions of the bodies and rotating reference frames. In order to help this comparison, Figures 23a, 23b, 24a, and 24b highlight the rendezvous angles and the angles that define the arc of the complete trajectory. In Figures 23c and 24e, the comparison of trajectories is straightforward since both are shown in the Moon rotating reference frame. This reference frame is centered on Earth with the X-axis pointing towards the Moon at all time, so that it rotates following the orbital motion of the Moon around Earth; and the Y-axis is orthogonal to the X-axis in the plane of motion of the bodies. In these last figures, the changing from the inertial reference frame centered on the Sun (Figures 23a, 24a) to the Moon rotating reference frame centered on the Earth (Figures 23c, 24e) amplifies the characterization of the phases of the patched-conic approximation, in a way that sharper corners are observed.
3.2.2 Optimal Solutions: The Three-Degree of Freedom Optimization Problem
In order to obtain better conclusions about the fuel consumption and the time
of flight for the Earth-Mars and Earth-Venus missions with an intermediary
lunar swing-by maneuver, the three-degree of freedom optimization problem
(Problem 9) is solved in the context of the PCR5BP, in which the parameters
As mentioned, all the optimization problems in this work are solved by means of the Sequential-Gradient Restoration Algorithm (SGRA) Miele et al.(1969) for constrained functions. In this section, this algorithm is initialized using a solution of the TPBVP defined by Problem 8; the results are presented in Table 5. The first step of the SGRA is the gradient phase, i.e, an perturbation is induced in the initial point, given by the initial guess, in the direction opposite to the gradient of the function to be minimized, i.e., in the direction to decrease the fuel consumption to obtain a new point. After, this first gradient phase, a restoration phase is performed in order to restore this new point to satisfy the constraints. The gradient and restoration are applied sequentially until the tolerance of the function to be minimized is achieved. Therefore, after each restoration phase there is a solution of the TPBVP with decreasing fuel consumption. Figures 25 and 27 show the solution after each restoration phase for Earth-Mars and Earth-Venus, respectively.
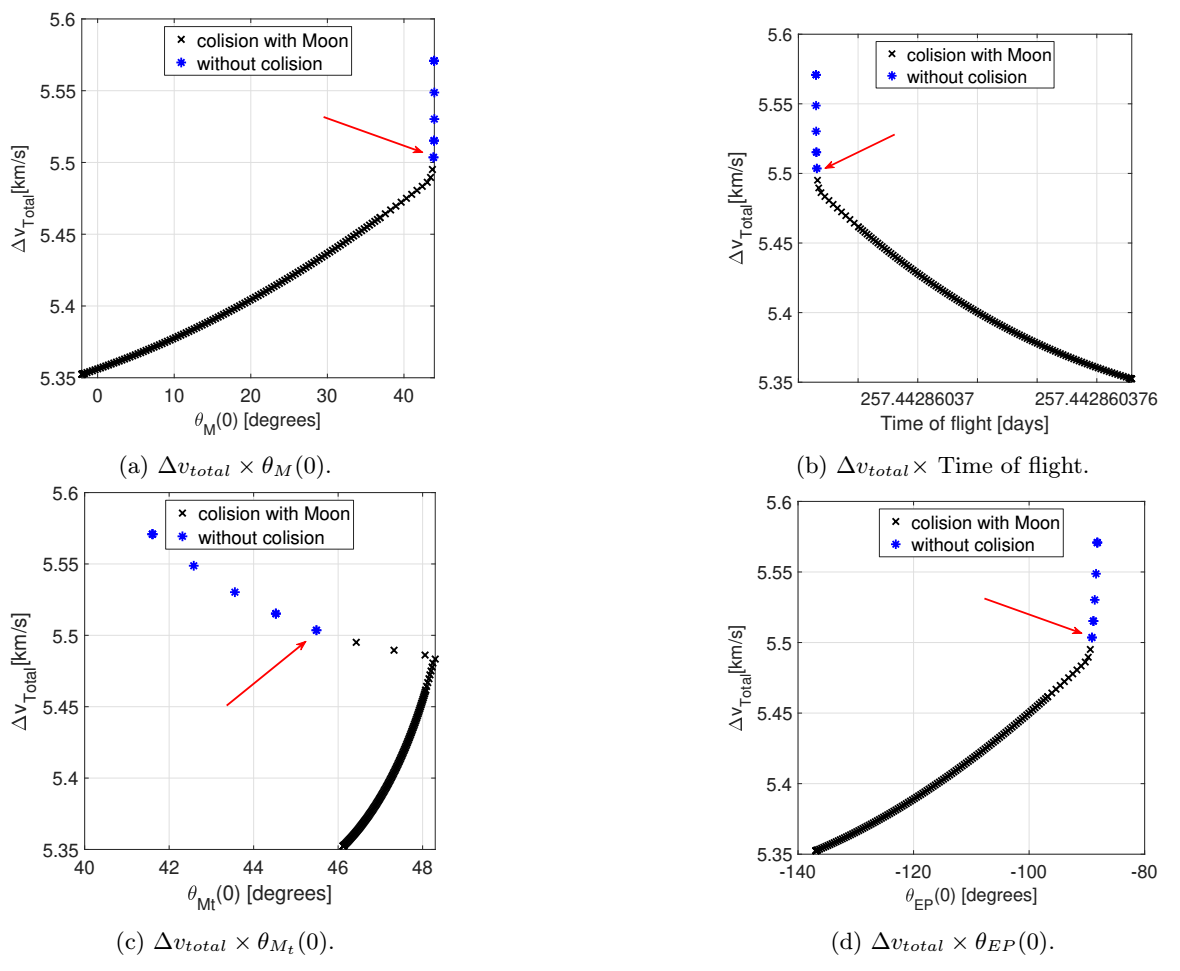
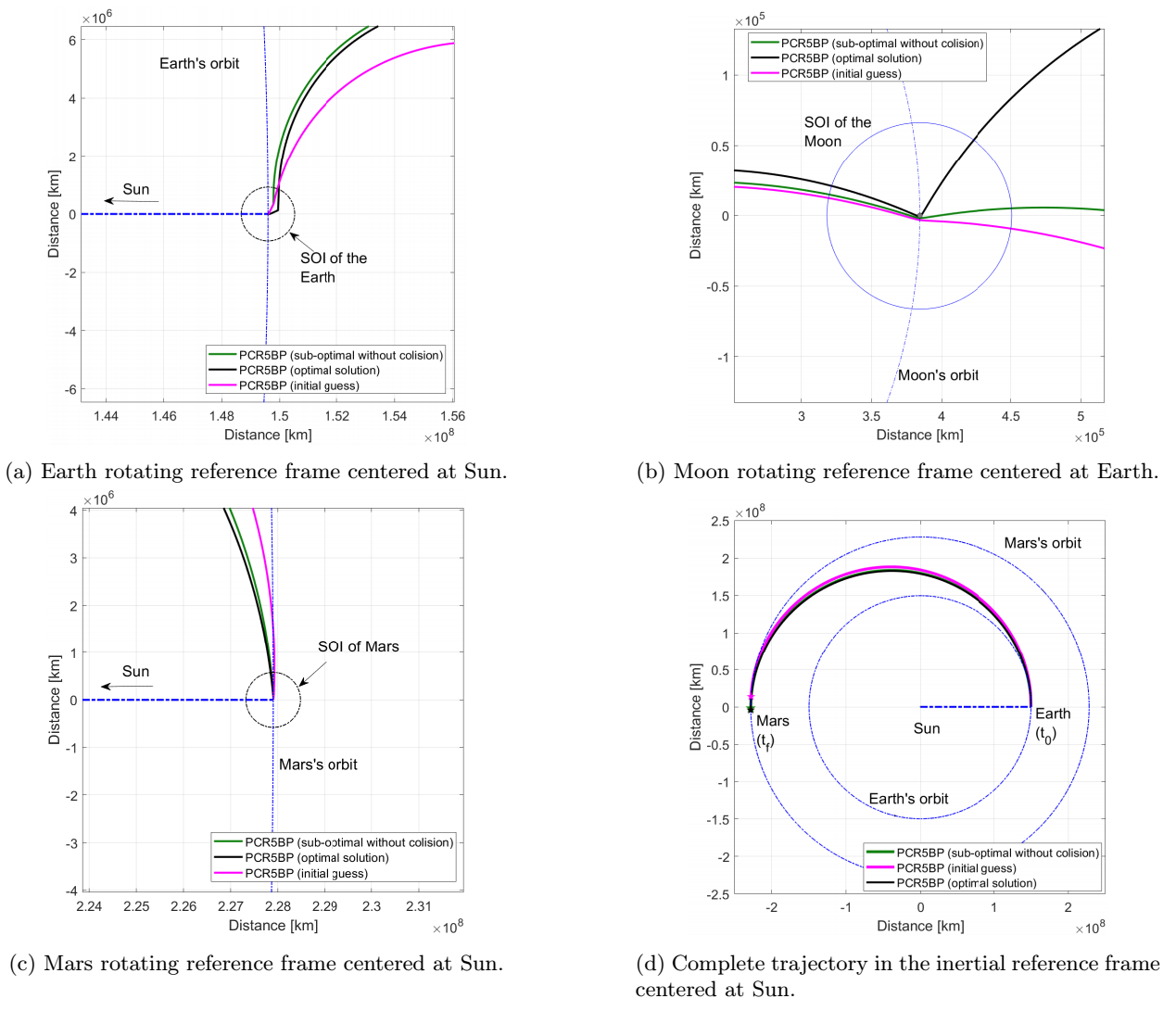
Fig. 26 Optimal Earth-Mars trajectory with a lunar swing-by maneuver. The color figure can be viewed online.
Since there is no constraint that specifies the periselenium altitude, the SGRA eventually can determine trajectory solutions in which the space vehicle collides with the Moon. Thus, the solutions with decreasing fuel consumption in Figures 25 and 27 are classified as trajectories that collide and trajectories that do not collide with the Moon. For the Earth-Mars mission, the first solutions of the SGRA do not collide with the Moon (Figure 25). As the fuel consumption decreases, the solutions collide until they reach the minimum fuel consumption at 5.352415 km/s, a decrease of 218.404 m/s. The initial phase angle of the Moon decreases by about 46.008° (Figure 25a), the rendezvous angle increases about 4.515° (Figure 25c), and the initial phase angle of the space vehicle decreases about 48.743° (Figure 25d). The time of flight, however, almost does not change during the optimization algorithm, staying at 257.443 days (Figure 25b). In a practical way, the interesting solution is the one that does not collide with the Moon, which is indicated by the red arrow in Figure 25; results are highlighted in Table 10 in comparison to the solution based on the PCR4BP. Therefore, the design of a lunar swing-by maneuver for the Earth-Mars mission saves up to 148.174 m/s of fuel consumption without changes on the time of flight, which stays at 257 days, and without many changes in the rendezvous angle, which increases only 1.568° (Table 10). The result of the trajectory without a collision with the Moon is, actually, a sub-optimal result extracted from the convergence of the optimization algorithm; thus, the same optimization problem applied to a different initial trajectory can lead to another sub-optimal trajectory. By observing Figures 25a, 25d, and Figure 25c the departure geometry must be accurate; otherwise, the space vehicle will collide to the Moon. By considering a window for the rendezvous angle of only 3.881° where the solutions without collision belong, Figure 25c, a maximum penalty on the fuel consumption of 67.264 m/s is observed.
Table 10 Main parameters for the smallest fuel consumption trajectories for Earth-Mars mission with and without a lunar swing-by maneuver
| Model |
|
|
|
Time of Flight |
|
|
|
|---|---|---|---|---|---|---|---|
| (km/s) | (km/s) | (km/s) | (days) | (degrees) | (degrees) | (degrees) | |
| PCR4BP[1] | 3.551905 | 2.100124 | 5.652029 | 257.861 | 179.075 | 298.382 | 43.918 |
| PCR5BP[1] | 3.404922 | 2.098633 | 5.503555 | 257.443 | 180.425 | 270.881 | 45.486 |
[1]Results from the two degree-of-freedom optimization problem based on the PCR4BP.
[2]Results from the two degree-of-freedom optimization problem based on the PCR5BP without a collision with the Moon.
Figure 26 plots three Earth-Mars trajectories with lunar swing-by maneuver: the first one is used as the initial guess to initialize the SGRA (magenta color); the second one is the optimal solution determined by the SGRA (black color); and, the third one is the trajectory determined by the SGRA with the smaller fuel consumption without a collision with the Moon (green color). The changing of the trajectory shape at departure from the Earth’s SOI (Figure 26a) is well visualized and it is due to the convergence of the SGRA. The smaller fuel consumption trajectory without a collision with the Moon (green trajectory) is closer to the optimal trajectory (magenta) than the initial guess trajectory (magenta). In fact, the trajectory without collision and the optimal trajectory perform an intense swing-by maneuver, which is better visualized in Figure 26b. Note that, as trajectories with smaller fuel consumption are obtained by SGRA, the distance of the periselenium is smaller on the swing-by maneuver, which has great influence on the deflection of the trajectory. Thus, the greater the deflection the smaller is the fuel consumption. For the trajectory without collision with the Moon, the altitude of the periselenium is just 78.313 km. On the other hand, the shape of the optimal trajectory and the shape of the non-collision trajectory with the Moon at the arrival to the Mars’s SOI (Figure 26b) are practically the same, and both are close to the initial guess trajectory, which arrives closer to the tangent of the orbital motion of Mars. The complete view of the trajectories (Figure 26d) reveals that the local effect of the lunar swing-by maneuver does not have much influence on the complete trajectory, so, the time of flight of the three trajectories is basically the same.
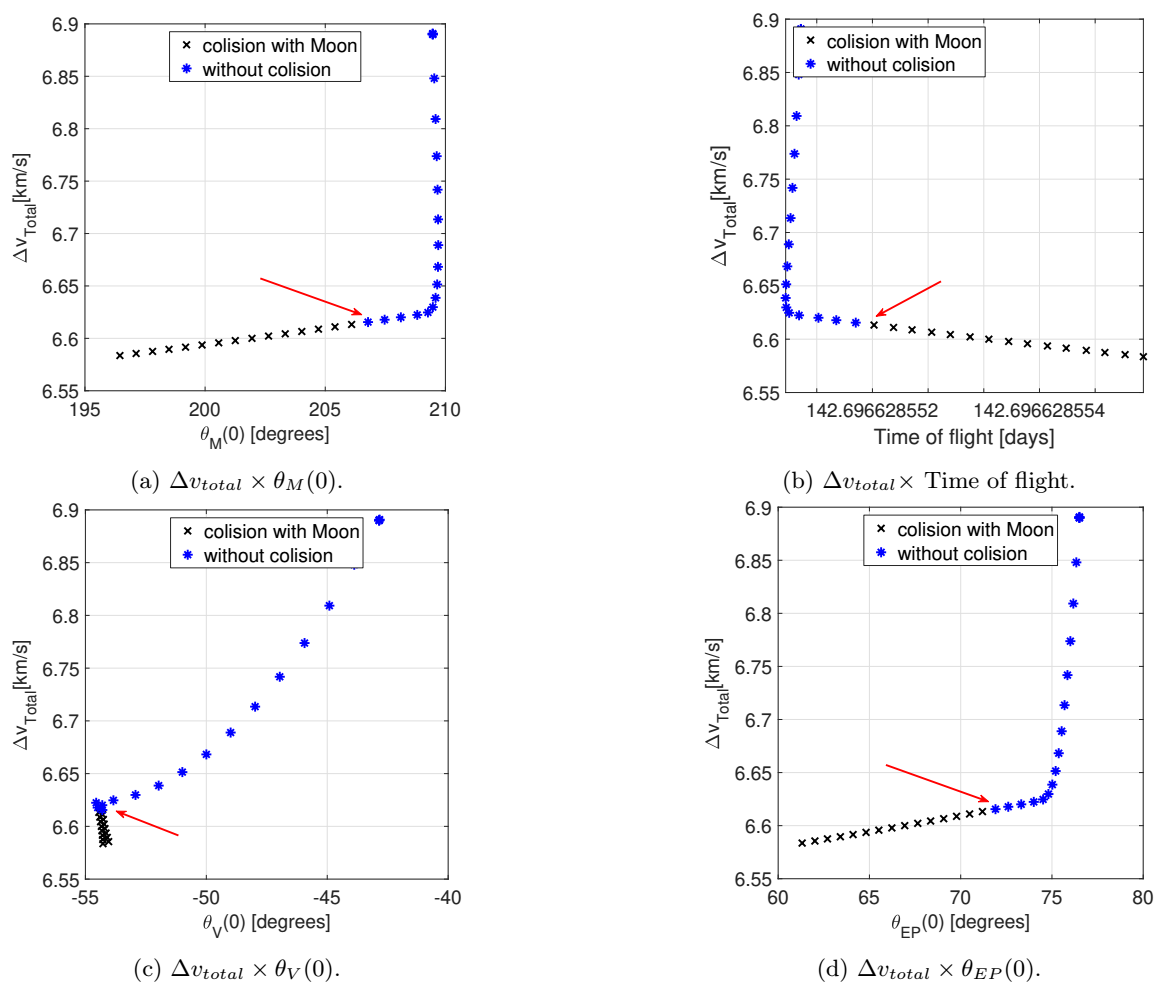
For the Earth-Venus mission, the initial guess for the SGRA also does not
collide with the Moon (Figure 27). The
minimum fuel consumption solution is reached at 6.583586 km/s, i.e., a
decrease of 307.201 m/s. The initial phase angle of the Moon decreases
13.016° (Figure 27a), the rendezvous
angle increases
Table 11: Main parameters for the smallest fuel consumption trajectories for Earth-Venus mission with and without a lunar swing-by maneuver
| 2[2]*Model |
|
|
|
Time of Flight |
|
|
|
|---|---|---|---|---|---|---|---|
| [km/s] | [km/s] | [km/s] | [days] | [degrees] | [degrees] | [degrees] | |
| PCR4BP[1] | 3.449138 | 3.337284 | 6.786422 | 139.628 | 173.795 | 105.084 | -50.060 |
| PCR5BP[2] | 3.275623 | 3.339886 | 6.615509 | 142.697 | 174.475 | 71.907 | -54.300 |
[1]Results from the two degree-of-freedom optimization problem based on the PCR4BP.
[2]Results from the two degree-of-freedom optimization problem based on the PCR5BP without a collision with the Moon.
Figure 28 plots three Earth-Venus trajectories with lunar swing-by maneuver: the first one is used as the initial solution to initialize the SGRA (magenta color); the second one is the optimal solution determined by the SGRA (black color), the third one is the smaller fuel consumption trajectory without collision with the Moon, also determined by the SGRA (green color). Note in Figures 28a and 28b the huge deflection of the black trajectory. As the SGRA computes smaller fuel consumption trajectories, the distance of the periselenium on the swing-by maneuver decreases until the optimal trajectory is reached (black color). For the smaller fuel consumption trajectory without collision with the Moon, the altitude of the periselenium is just 44.468 km. In order to prescribe the periselenium altitude, one can add an intermediary constraint for the altitude of the swing-by maneuver; however, this problem becomes harder to solve since it becomes more restrictive. An interesting comparison between the Earth-Mars and the Earth-Venus mission is observed in Figures 26a and 28a: for the Earth-Mars mission, the lunar swing-by maneuver occurs when the Moon is ahead the Earth and farther from the Sun than Earth (Figure 26a); on the other hand, for the Earth-Venus mission, the lunar swing-by maneuver occurs when the Moon is behind the Earth and closer to the Sun than Earth. In both cases, however, the swing-by maneuver occurs in a counterclockwise sense, since the space vehicle must accelerate during the swing-by maneuver. These differences in the position of the Moon are related to the type of transfer: inner transfer or outer transfer. For the outer transfer (Earth-Mars mission), the space vehicle must leave the SOI of Earth from ahead according to the Hohmann transfer; and, for the inner transfer (Earth-Venus mission), the space vehicle must leave the SOI of Earth from behind. Therefore, the lunar swing-by maneuver aids the space vehicle to achieve the hyperbolic excess velocity, which corresponds to an accelerative velocity increment of the Hohmann transfer for an outer mission, or it corresponds to a decelerating velocity increment of the Hohmann transfer for an inner mission.
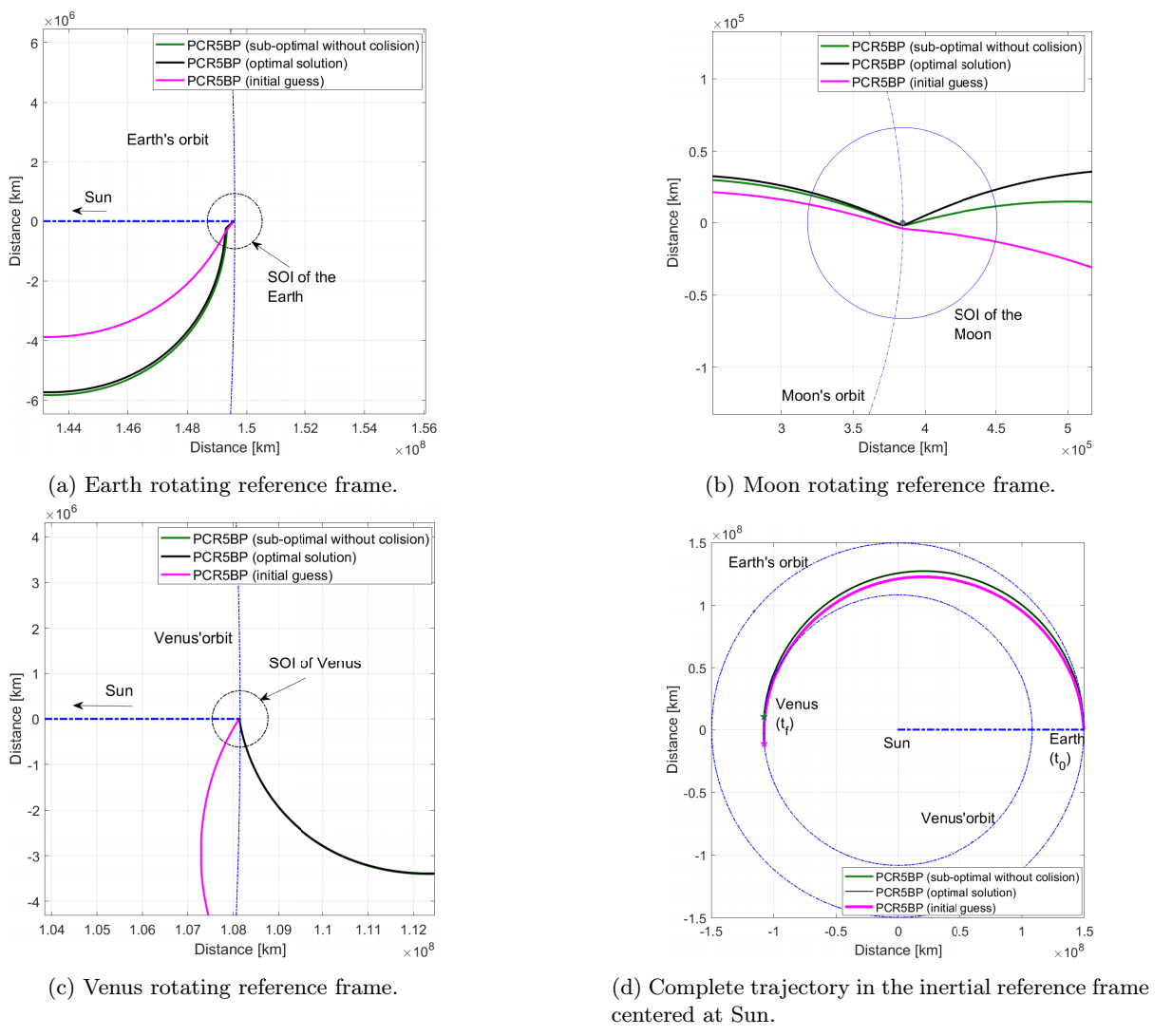
Fig. 28 Optimal Earth-Venus trajectory with a lunar swing-by maneuver. The color figure can be viewed online.
Tables 12 and 13 compile the results already seen with the best
transfer with and without lunar swing-by maneuver. The results determined by
Miele and Wang(1999b) for the
Earth-Mars mission are also repeated in order to highlight the similarity of
the results determined by Miele and
Wang(1999b) and the ones calculated in this work, specifically in
the context of the PCR4BP. A detailed discussion about this result was
already done in § 3.1 and § 3.2. As a final remark, Prado(2003) calculates the saving of fuel consumption
due to a lunar swing-by maneuver for interplanetary trajectories based on
the Hohmann transfer. In this way, for an altitude of the lunar swing-by
maneuver of 102 km, Prado(2003)
determines a saving of 124 m/s for the Earth-Mars mission, and a saving of
137 m/s for the Earth-Venus mission. For an altitude of the lunar swing-by
maneuver of 12 km, Prado(2003)
determines a saving of 129 m/s for the Earth-Mars mission, and a saving of
142 m/s for the Earth-Venus mission. The savings of fuel consumption for a
more high fidelity model as the PCR5BP determined by the present work are
practically the same as those determined by Prado(2003) or even a little larger: for the Earth-Mars mission
the saving reaches 148 m/s (compare
Table 12: Main parameters for the smallest fuel consumption trajectories for Earth-Mars mission
| Model |
|
|
|
Time of Flight |
|---|---|---|---|---|
| (km/s) | (km/s) | (km/s) | (days) | |
| PCR4BP[1] | 3.551905 | 2.100124 | 5.652029 | 257.861 |
| Miele[2] | 3.552000 | 2.100000 | 5.652000 | 257.880 |
| Patched-conic | ||||
| based on Hohmann | -2* 3.555746 | -2*2.101260 | -2*5.657006 | -2*264.430 |
| Patched-conic | ||||
| based on Gauss | -2*3.555572 | -2*2.101454 | -2*5.657026 | -2*263.579 |
| Patched-conic | ||||
| detailed geometry[3] | -2*3.514668 | -2*2.087434 | -2*5.602101 | -2*257.965 |
| Patched-conic | ||||
| lunar swing-by | -2*3.362211 | -2* 2.086891 | -2*5.449101 | -2* 257.443 |
| PCR5BP[4] | ||||
| Lunar swing-by | 3.404922 | 2.098633 | 5.503555 | 257.443 |
[1]Results from a two degree-of-freedom optimization problem.
[2]Results based on the PR4CP calculated by Miele and Wang(1999).
[3]Smallest fuel consumption trajectory found for
[4]Results from the two degree-of-freedom optimization problem based on the PCR5BP without a collision with the Moon.
Table 13: Main parameters for the smallest fuel consumption trajectories for Earth-Venus mission
| 2[2]*Model |
|
|
|
Time of Flight |
|---|---|---|---|---|
| (km/s) | (km/s) | (km/s) | (days) | |
| PCR4BP[1] | 3.449138 | 3.337284 | 6.786422 | 139.628 |
| Patched-conic | ||||
| based on Hohmann | -2* 3.447245 | -2*3.339810 | -2*6.787055 | -2*151.822 |
| Patched-conic | ||||
| based on Gauss | -2*3.447417 | -2*3.339550 | -2*6.786967 | -2*151.771 |
| Patched-conic | ||||
| detailed geometry [2] | -2*3.406312 | -2*3.294024 | -2*6.700336 | -2*147.976 |
| Patched-conic | ||||
| lunar swing-by | -2*3.376566 | -2* 3.289849 | -2*6.666415 | -2* 149.440 |
| PCR5BP[3] | ||||
| Lunar swing-by | 3.275623 | 3.339886 | 6.615509 | 142.697 |
[1]Results from a two degree-of-freedom optimization problem.
[2]Smallest fuel consumption trajectory found for
[3]Results from the two degree-of-freedom optimization problem based on the PCR5BP without a collision with the Moon.
4 Conclusion
This work describes two-point boundary value problems to determine interplanetary trajectories with and without lunar swing-by maneuvers considering several models: patched-conic approximation based on Hohmann transfer, patched-conic approximation based on the Gauss problem; patched-approximation associated with a boundary problem; patched-conic approximation associated with a boundary problem and with an intermediary constraint that defines a lunar swing-by maneuver; a model based on the four-body problem; and a model based on the five-body problem. The comparison of the models illustrates that the patched-conic approximations provide good initial guesses for more complex models such as the PCR4BP and the PCR5BP models, making the convergence of the optimization problems easier.
The first part of the present work analyses interplanetary missions without a lunar swing-by maneuver. The interplanetary patched-conic with detailed geometry shows that the direction of the target orbit does not change the velocity increments, the time of flight, the rendezvous angle, and the initial phase angles of the space vehicle. The only difference due to the direction of the target orbit is the phase angle of the space vehicle at the arrival at the target orbit. Optimal interplanetary trajectories are computed in the context of the PCR4BP by a two-degree optimization problem. An analysis around the solutions of this two-degree optimization problem is performed by an one-degree optimization problem, which reveals that the penalty on the fuel consumption due to the delayed or early departures is more severe for the Earth-Venus mission than for the Earth-Mars mission. Future work can be accomplished to generalize and classify the results of the fuel consumption between interior and exterior planet missions.
The second part analyses interplanetary missions with a lunar swing-by maneuver. A first comparison is made between the results of a patched-conic approximation and the results of a model based on the PCR5BP, and it shows the possibility to save fuel consumption without changing the time of flight. These first solutions are utilized to initialize a three-degree of freedom optimization problem in which the position of the Moon, the rendezvous angle, the velocity increments, the time of flight, and the initial phase angle of the space vehicle are set as unknowns to minimize the fuel consumption. The results show that the optimal trajectory for the Earth-Mars and Earth-Venus mission collides with the Moon during the swing-by maneuver. However, sub optimal solutions that do not collide with the Moon are practical presenting a significant saving of fuel consumption without many changes on the time of flight when they are compared to the solutions without a lunar swing-by maneuver.

