











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
La fracción de cobertura de la vegetación (FCV) se define como la proyección vertical de las copas, coronas, brotes y hojas de vegetación sobre la superficie del suelo, expresada como fracción o porcentaje del área de referencia (Choi et al., 2016; Gitelson et al., 2002). En el desarrollo de los cultivos la FCV es una de las principales variables que pueden indicar características biofísicas, como la densidad de las plantas, la fenología, el índice de área foliar y el rendimiento (Fang et al., 2016). La cobertura vegetal se usa ampliamente en el modelado de la radiación fotosintéticamente activa interceptada (fAPAR), la cual se relaciona con la capacidad fotosintética del follaje y productividad de la vegetación (Steven et al., 1986). El modelo AquaCrop es uno de los que emplea el índice de área foliar (IAF) y la cobertura vegetal por su mayor versatilidad y facilidad para su obtención en campo a lo largo del ciclo (Raes et al., 2009). El monitoreo y seguimiento de las variaciones espaciales y temporales de la FCV de los cultivos permite relacionarla con el estado fenológico y fisiológico del cultivo y la predicción del rendimiento (García-Martínez et al., 2020).
En los últimos años la tecnología digital ha presentado gran evolución, lo que ha hecho posible el seguimiento del desarrollo del follaje por medio de fotografías digitales, así como la determinación de la cobertura de la vegetación mediante el empleo de técnicas de interpretación de imágenes (Rodríguez et al., 2000). Los procedimientos que ensamblan los modelos de cultivo con la teledetección, por lo general, emplean tanto el IAF como la FCV para realizar el acople de ambas tecnologías (De la Casa et al., 2011), lo que corrige la simulación del modelo en tiempo y forma para conseguir mayor precisión en las estimaciones de productividad; así mismo, se han desarrollado sensores y plataformas aéreas, como los vehículos aéreos no tripulados (UAV por sus siglas en inglés, VANT o comúnmente drones), los cuales han marcado una nueva era en la teledetección y ha sido la agricultura de precisión uno de los sectores más beneficiados con el desarrollo de los drones (Maes y Steppe, 2019).
Algunas de las limitaciones presentadas en plataformas como satélites y vehículos aéreos se han superado con el reciente empleo de los UAV, los cuales pueden incorporar cámaras comerciales de bajo costo y producir alta resolución espacial, lo que mejora la resolución temporal e incluso permite tomar imágenes en días nublados, mejorar la flexibilidad en la programación de los vuelos y capturar imágenes durante todo el desarrollo del cultivo (Schirrmann et al., 2016). Los sensores comúnmente empleados en la teledetección mediante UAV son RGB, multiespectrales livianas, hiperespectrales, infrarrojos térmicos ligeros y LIDAR; los sensores RGB se encuentran ampliamente disponibles y son de menor costo comparado con los otros sensores, pero tienen información espectral limitada (Colomina y Molina, 2014), mientras que los multiespectrales e hiperespectrales contienen gran cantidad de información formada por cientos de canales espectrales estrechos y casi continuos (Paoletti et al., 2019). Al respecto, Yao et al. (2019) realizaron una revisión extensa sobre estos sensores y sus aplicaciones
La estimación de la FCV se realiza mediante operaciones matemáticas con el empleo de índices de vegetación (IV) en el espectro que es reflejado por la vegetación en diferentes longitudes de onda (Torres-Sánchez et al., 2014); algunos IV emplean en el cálculo sólo las bandas roja (600 a 680 nm), verde (515 a 600 nm) y azul (450 a 520 nm) del espectro visible. Se han propuesto varios índices que emplean sólo la región visible del espectro para monitorear características de la vegetación, lo que implica una ventaja al ser de menor costo en comparación con los multiespectrales o hiperespectrales. Hunt et al. (2011) desarrollaron el índice de verdor triangular (TGI, siglas en inglés) para estimar la clorofila en las hojas y detectar los requerimientos de nitrógeno en los cultivos con cámaras digitales de bajo costo montadas en plataformas aéreas de baja altitud. Por su parte, Woebbecke et al. (1995) mostraron que el índice de vegetación de exceso de verde (EXG, siglas en inglés) permite identificar malezas bajo distintos tipos de suelo, cobertura de residuos y condiciones de iluminación.
Con información espectral de campo, Gitelson et al. (2002) desarrollaron algoritmos como el índice del visible resistente atmosféricamente (VARI, siglas en inglés), que utiliza sólo datos del visible para estimar la fracción de cobertura y el índice de la diferencia verde-rojo normalizada (NGRDI, siglas en inglés) para determinar tanto la biomasa producida como el estado nutricional de los cultivos. La alta resolución que se alcanza con las imágenes tomadas con UAVs permite que los pixeles discriminen vegetación y suelo, con una baja proporción de pixeles que representan una cobertura mixta. En imágenes con alta resolución espacial es necesario determinar el IV que mejora la identificación de los pixeles que contienen vegetación y los pixeles que no, así como el método y valores de umbralización que faciliten discriminar la vegetación u objeto de interés (Torres-Sánchez et al., 2014).
Existen diferentes algoritmos que permiten determinar el umbral para agrupar los pixeles de una imagen en clases (suelo y vegetación), pero no todos son aplicables a la clasificación de la cubierta terrestre (Macedo-Cruz et al., 2010). Los métodos más utilizados son el algoritmo de Otsu (Otsu, 1979), umbralización Fuzzy (Huang y Wang, 1995), IsoData (Ridler y Calvard, 1978) y de conservación del momento (Tsai, 1985). El algoritmo de Otsu es ampliamente utilizado para aplicaciones agronómicas (Guijarro et al., 2011; Macedo-Cruz et al., 2011) para separar la vegetación de cultivos en imágenes de alta resolución adquiridas con drones; sin embargo, existen otros algoritmos que determinan el umbral con otros enfoques. Existe información limitada del empleo del algoritmo IsoData, Fuzzy y conservación de momentos en la estimación de la fracción de cobertura de la vegetación.
El objetivo del presente estudio fue determinar el índice que presente menor error en la extracción de la vegetación y el método de umbralización que clasifique mejor la vegetación en imágenes tomadas con sensor de alta resolución montado en un vehículo aéreo no tripulado, así como el comportamiento de la fracción de cobertura en el cultivo del maíz.
MATERIALES Y MÉTODOS
Sitio de estudio
Un cultivo de maíz (Zea mays L.) fue establecido en una superficie de 6000 m2 con el híbrido HS-2 en el Colegio de Posgraduados campus Montecillo, Texcoco, Estado de México, México, localizado a los 19° 27’ 40.58” N, 98° 54’ 8.57” O, 1250 msnm, en un suelo de textura migajón arenoso, pH de 9.1, conductividad eléctrica de 1.72 dS m-1, densidad aparente de 1.45 g cm-3, M.O. 1.59 % y un punto de saturación de 29.25 %.
Manejo agronómico
La siembra fue mecánizada y se realizó el 17 de mayo de 2017 con un espaciamiento entre surcos de 0.80 m y entre plantas de 0.20 m. La fertilización fue 80 kg ha-1 de nitrógeno, 60 kg ha-1 de fósforo en la siembra y 80 kg ha-1 el 22 de junio. Se aplicaron cinco riegos de forma rodada durante todo el ciclo del cultivo. Las malezas se controlaron de manera manual y química mediante el herbicida Primagram Gold (atrazina y s-metolaclor) a dosis de 4 L ha-1.
Adquisición de imágenes mediante vuelos de UAV
La adquisición de las imágenes se realizó con un vehículo aéreo no tripulado (UAV), cuadricóptero Dji Phanton 4 (DJI, Shenzhen, Guangdong, China), equipado con un sensor semiconductor complementario de óxido metálico (CMOS, por sus siglas en ingles) de una pulgada, con un tamaño de imagen de 20 megapixeles en color verdadero compuesto por los canales rojo, verde y azul (RGB, por sus siglas en ingles Red-Green-Blue), con dimensiones de 5472 × 3648 pixeles por cada canal. El equipo es capaz de realizar un despegue y aterrizaje en vertical con una capacidad de carga de 1.388 kg y una autonomía de 30 min de vuelo, se encuentra dotado de un sistema de posicionamiento por satélite GPS/GLONASS con un rango de precisión vertical ± 0.5 m y horizontal de 1.5 m, que le permite realizar vuelos autónomos a partir de una ruta previamente programada.
La toma de imágenes fue controlada mediante la configuración de vuelo, para cada imagen se registraron la posición GPS, altura, hora, fecha y propiedades del sensor. Durante el procesamiento de las imágenes capturadas por el sensor montado en el dron, los parámetros de vuelo y sensor determinan la calidad de los ortomosaicos y la nube de puntos generada (Dandois et al., 2015; Seifert et al., 2019). De acuerdo con las características del dron y sensor, se seleccionaron parámetros como altitud, traslape de imágenes y velocidad de vuelo, lo que se relacionó con la imagen capturada, la resolución en el suelo y la cantidad de imágenes por área. Los traslapes de las imágenes se generaron en los sentidos horizontal y lateral, el traslape horizontal depende de la altitud de vuelo, cantidad de imágenes capturadas por segundo y velocidad de vuelo, mientras que el traslape lateral depende de la ruta de vuelo (Tu et al., 2020). A partir de las características del dron y sensor se pueden planificar el tamaño de pixel en el suelo (GSD, por sus siglas en ingles), altura de vuelo (H), velocidad de vuelo (V), traslape horizontal (TH) y traslape lateral (TL).
donde: AI es el área de la imagen, Tsx y Tsy es el ancho y alto del sensor (mm), Npx y Npy representan el número de pixeles en X y Y, LF es la longitud focal del sensor (mm), DL es la distancia entre líneas de vuelo (m) y Vd es la velocidad de disparo del sensor (ms-1). La configuración de los vuelos para la captura de imágenes se realizó mediante la aplicación para dispositivos móviles Pix4Dcapture 4.2.2, a una altura de vuelo de 30 m con traslape del 80 % horizontal y lateral. Se han tenido resultados satisfactorios en la generación de ortomosaicos y modelos digitales con traslapes superiores al 70 % (Gupta y Shukla, 2018). Los vuelos se realizaron durante un periodo comprendido del 13 de junio al 28 de julio de 2017 a intervalos semanales, con un total de seis vuelos (Cuadro 1), en horario variable entre las 11:30 a.m. y 3:00 p.m. para obtener buenas condiciones de iluminación.
Cuadro 1 Bitácora de vuelos.
| No. de vuelo | Días después de la siembra |
Fecha | Altura (m) | Numero de imágenes |
Área (m2) |
Tamaño de pixel (cm) |
|---|---|---|---|---|---|---|
| 1 | 28 | 13 de junio | 30 | 188 | 12,986 | 0.75 |
| 2 | 37 | 22 de junio | 30 | 217 | 14,963 | 0.76 |
| 3 | 43 | 28 de junio | 30 | 184 | 13,890 | 0.77 |
| 4 | 58 | 13 de julio | 30 | 236 | 15,402 | 0.80 |
| 5 | 66 | 21 de julio | 30 | 295 | 14,671 | 0.75 |
| 6 | 73 | 28 de julio | 30 | 116 | 12,416 | 0.74 |
Procesamiento de imágenes y generación de ortomosaicos
Seis ortomosaicos fueron generados a partir del procesamiento de las imágenes adquiridas por el sensor montado en el dron con el programa Pix4D (Pix4D SA, Lausanne, Suiza) mediante el método de análisis de imágenes conocido como estructura del movimiento (SFM, por sus siglas en inglés) (Figura 1). El método SFM busca características en imágenes individuales para correlacionarlas con características que coinciden con imágenes traslapadas llamadas puntos clave; con los puntos clave se calibran los parámetros de la cámara interiores y exteriores (posición, escala y orientación de las imágenes), a partir de las características se realiza una correlación de puntos para identificar y relacionar características similares entre imágenes en áreas comunes o de traslape. La posición 3D calculada en los puntos correlacionados se densifica y se texturiza con las imágenes correspondientes, con lo cual se genera el ortomosaico que proyecta cada pixel texturizado en un plano 2D (Allan et al., 2019; Lucieer et al., 2014). La resolución de los ortomosaicos generados a partir de las imágenes capturadas en cada vuelo varían en el intervalo de 0.7 a 0.8 cm/pixel (Cuadro 1).
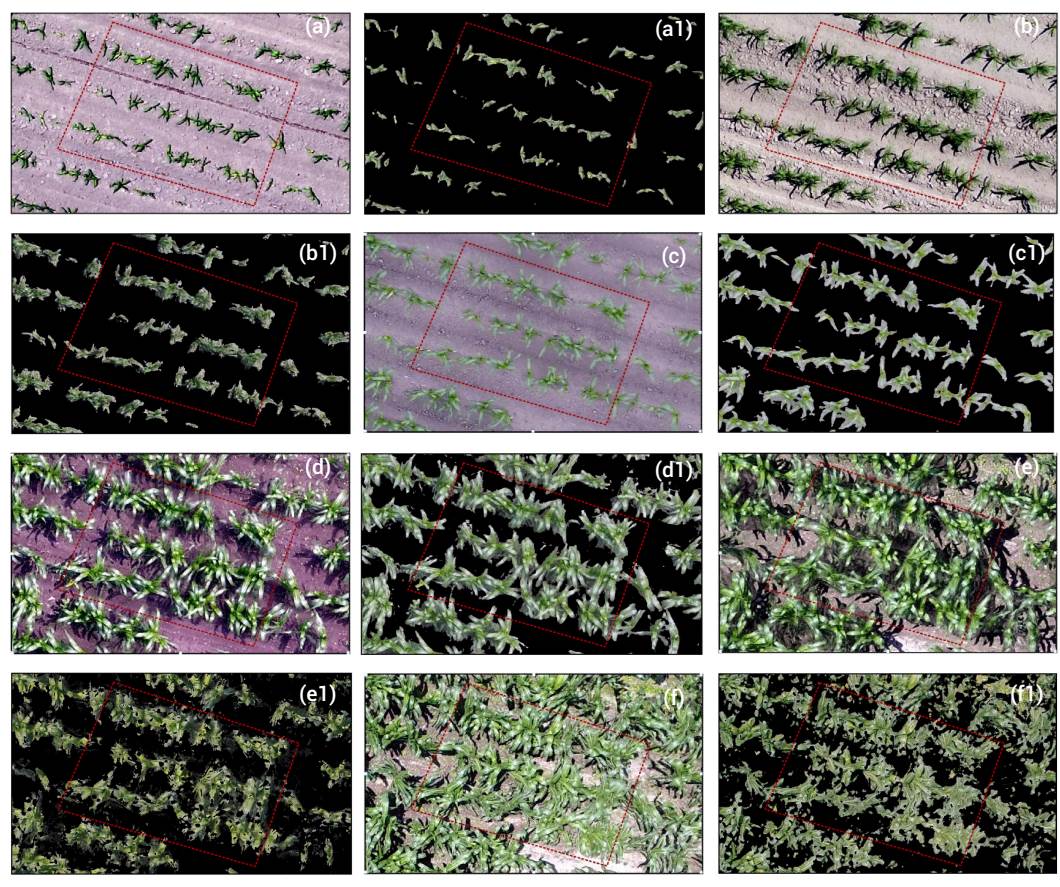
Figura 1 Ortomosaico generado con imágenes capturadas con el UAV durante el desarrollo del cultivo, sitio de muestreo de 9.5 m2. a) Ortomosaico a los 28 días después de siembra (DDS), a1) vegetación a partir del índice NGRDI y método IsoData, umbral de 0.0254, b) ortomosaico a los 37 DDS, b1) vegetación a partir del índice EXG y método Fuzzy, umbral de 0.0471, c) ortomosaico a los 43 DDS, c1) vegetación a partir del índice NGRDI y método conservación de momentos, umbral de 0.0100, d) ortomosaico a los 58 DDS, d1) vegetación a partir del índice NGRDI y método conservación de momentos, umbral de 0.0200, e) ortomosaico a los 66 DDS, e1) vegetación a partir del índice NGRDI y método Otsu, umbral de 0.0863, f) ortomosaico a los 73 DDS, f1) vegetación a partir del índice TGI y método conservación de momentos, umbral de 22.00.
Índices de extracción de la vegetación en el espectro visible (RGB)
Se procesaron cuatro índices de vegetación (IV) para cada ortomosaico generado por cada vuelo, de acuerdo con el Cuadro 2. Los histogramas de los canales RGB de los ortomosaicos se ajustaron en los valores de intensidad con el comando imadjust del programa Matlab (Mathworks, Natick, MA, EUA) para cada canal. Los IV se calcularon en el espacio de color estándar RGB con el programa Matlab, para lo cual se separó la reflectancia del rojo, verde y azul de la imagen, para realizar la operación matemática (Cuadro 2) del índice de vegetación por cada pixel o número digital en los canales de la imagen; se obtuvo como resultado del proceso una matriz en escala de grises (0-255) por cada IV calculado. Las variables r, g y b del índice EXG son valores normalizados de los canales rojo, verde y azul, de acuerdo con:
donde: RN, GN, BN son los valores normalizados de cada banda; R, G y B son los valores sin normalizar de los canales rojo, verde y azul; Rmax = Gmax = Bmax son los números digitales máximos de cada canal (255 en la escala 0-255).
Cuadro 2 Índices de vegetación calculados en las bandas del espectro visible (RBG) para la extracción de la vegetación y estimación de la fracción de cobertura vegetal (FCV), donde RRojo , RVerdey RAzul son los números digitales o reflectancia de cada canal.
| Índice de vegetación | Fórmula | Referencia |
|---|---|---|
| Índice de verdor triangular | TGI = RVerde - 0.39 RRojo - 0.61RAzul | (Hunt et al., 2013)R670 |
| Índice de extracción del verde | EXG = 2 × r-g-b | (Woebbecke et al., 1995) |
| Índice de resistencia atmosférica visible | VARI= RRojo- RVerde/RVerde + RRojo - RAzul | (Gitelson et al., 2002) |
| Índice de diferencia normalizada verde - rojo | NGRDI = RVerde - RRojo/RVerde + RRojo | (Gitelson et al., 2002) |
Clasificación de la vegetación por umbrales
Los índices de vegetación extraen información relacionada con la vegetación y minimizan la influencia del suelo y las condiciones atmosféricas, de lo que resultan números digitales en una imagen en escala de grises, pero no clasifican los pixeles o separan los objetos presentes en la imagen. La umbralización es uno de los métodos más usados para separar objetos presentes en imágenes del fondo de éstas. En el presente estudio se emplearon cuatro métodos de umbralización para separar la vegetación presente en la imagen por cada IV calculado por cada fecha de vuelo. Se emplearon los métodos Otsu, IsoData, conservación de momentos y Fuzzy para obtener el umbral para separar la vegetación y suelo. En el programa Matlab se calculó el umbral de acuerdo con el método de Otsu mediante la función graythresh, mientras que para los métodos IsoData y conservación de momentos se emplearon las funciones th_intermeans_iter y th_moments, de la caja de herramientas HistThresh del software libre bajo licencia GNU (Niemistö, 2004; Com. Pers.)1; el umbral por el método de Fuzzy fue calculado con el paquete autothresholdr en el programa Rstudio (Landini et al., 2017) (Cuadro 4).
Cuadro 3 Tiempo de cómputo en la recolección de imágenes durante el vuelo, procesamiento de imágenes capturadas y generación de ortomosaicos, procesamiento de índices de vegetación y procesamiento de métodos de umbralización.
| Parámetros | Días después de la siembra | |||||
|---|---|---|---|---|---|---|
| 28 | 37 | 43 | 58 | 66 | 73 | |
| Captura de imágenes durante el vuelo con el UAV | ||||||
| Imágenes | 188 | 217 | 184 | 236 | 295 | 116 |
| Tiempo de captura de imágenes (min) | 6 | 7 | 6 | 11 | 17 | 5 |
| Tiempo de procesamiento de imágenes y generación de ortomosaico (h)† | ||||||
| Procesamiento inicial | 1.32 | 2.37 | 1.29 | 3.77 | 2.91 | 0.98 |
| Densificación de la nube de puntos | 0.84 | 0.85 | 0.84 | 1.3 | 0.97 | 0.72 |
| Generación de mallas texturizadas 3D | 0.13 | 0.37 | 0.21 | 0.37 | 0.36 | 0.24 |
| Generación de ortomosaico | 0.72 | 0.52 | 0.48 | 0.66 | 0.73 | 0.47 |
| Tamaño de ortomosaico (pixeles) | 11470 × 15466 | 11742 × 15833 | 11542 × 15564 | 11010 × 14845 | 11809 × 15924 | 11794 × 15909 |
| Tiempo de procesamiento de índices de vegetación (s)†† | ||||||
| EXG | 13.53 | 16.4 | 12.76 | 4.7 | 9.66 | 19.85 |
| NGRDI | 0.243 | 0.254 | 0.235 | 0.22 | 0.252 | 0.272 |
| TGI | 0.283 | 0.339 | 0.269 | 0.246 | 0.271 | 0.317 |
| VARI | 0.48 | 0.311 | 0.267 | 0.242 | 0.278 | 0.317 |
| Tiempo de procesamiento de métodos de umbralización (s)¶ | ||||||
| Otsu | 0.206 | 0.224 | 0.221 | 0.181 | 0.455 | 0.392 |
| IsoData | 3.864 | 3.896 | 3.852 | 2.128 | 5.734 | 5.995 |
| Fuzzy | 2.584 | 2.302 | 2.281 | 1.759 | 3.725 | 3.89 |
| Conservación de momentos | 2.783 | 1.885 | 1.869 | 2.067 | 3.687 | 3.983 |
†Con el programa Pix4D (h) con un equipo CPU Intel(R) Xeon(R) E3-1270 @ 3.50 GHz, RAM 32 Gb, GPU Nvidia Quadro 600; ††Con un equipo CPU Intel(R) Core(TM) i7-8750H @ 2.20 GHz, RAM 16Gb, GPU NVIDIA GeForce GTX 1060; ¶Con un equipo CPU Intel(R) Core(TM) i7-8750H @ 2.20 GHz, VARI y menor error con el método de umbralización Otsu. Gitelson et al. (2002) y Viña et al. (2004) señalaron que el índice VARI es sensible a los cambios en la cobertura RAM 16GB, GPU NVIDIA GeForce GTX 1060.
Cuadro 4 Umbrales, error absoluto medio (EMA) y la raíz cuadrada del error cuadrático medio (RECM) para los índices de vegetación y métodos de umbralización durante el desarrollo del cultivo.
| Método | DDS | EXG | NGRDI | TGI | VARI | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Umbral | EMA | RECM | Umbral | EMA | RECM | Umbral | EMA | RECM | Umbral | EMA | RECM | ||
| 28 | 0.0667 | 0.024 | 0.028 | 0.0353 | 0.024 | 0.029 | 0.4980 | 0.023 | 0.031 | 0.0157 | 0.107 | 0.157 | |
| 37 | 0.1020 | 0.055 | 0.064 | 0.0549 | 0.051 | 0.060 | 0.4980 | 0.070 | 0.088 | 0.0196 | 0.079 | 0.089 | |
| Otsu | 43 | 0.1176 | 0.067 | 0.082 | 0.0431 | 0.052 | 0.061 | 0.4980 | 0.031 | 0.038 | 0.0314 | 0.051 | 0.056 |
| 58 | 0.1255 | 0.141 | 0.155 | 0.0549 | 0.089 | 0.096 | 0.4980 | 0.048 | 0.060 | 0.0471 | 0.091 | 0.143 | |
| 66 | 0.1647 | 0.155 | 0.197 | 0.0863 | 0.103 | 0.144 | 0.4941 | 0.187 | 0.219 | 0.0239 | 0.179 | 0.192 | |
| 73 | 0.1647 | 0.178 | 0.220 | 0.1020 | 0.202 | 0.262 | 0.4941 | 0.355 | 0.394 | 0.0392 | 0.365 | 0.408 | |
| 28 | 0.0595 | 0.028 | 0.032 | 0.0000 | 0.074 | 0.155 | 11.00 | 0.024 | 0.029 | 0.0104 | 0.057 | 0.068 | |
| 37 | 0.0609 | 0.046 | 0.053 | 0.0000 | 0.055 | 0.074 | 15.00 | 0.048 | 0.057 | 0.0144 | 0.168 | 0.255 | |
| Conservación de momentos | 43 | 0.0687 | 0.057 | 0.068 | 0.0100 | 0.013 | 0.016 | 25.00 | 0.064 | 0.078 | 0.0180 | 0.030 | 0.033 |
| 58 | 0.0678 | 0.105 | 0.114 | 0.0200 | 0.043 | 0.049 | 23.00 | 0.129 | 0.146 | 0.0339 | 0.086 | 0.102 | |
| 66 | 0.1050 | 0.125 | 0.163 | 0.1098 | 0.164 | 0.212 | 22.00 | 0.131 | 0.179 | 0.0328 | 0.305 | 0.354 | |
| 73 | 0.1207 | 0.171 | 0.213 | 0.0921 | 0.163 | 0.227 | 22.00 | 0.118 | 0.148 | 0.0625 | 0.546 | 0.593 | |
| 28 | 0.0772 | 0.027 | 0.032 | 0.0254 | 0.018 | 0.021 | 0.4882 | 0.023 | 0.031 | 0.0106 | 0.057 | 0.068 | |
| 37 | 0.0945 | 0.052 | 0.060 | 0.0472 | 0.046 | 0.054 | 0.4921 | 0.070 | 0.088 | 0.0118 | 0.150 | 0.234 | |
| IsoData | 43 | 0.1063 | 0.063 | 0.076 | 0.0354 | 0.044 | 0.052 | 0.4961 | 0.031 | 0.038 | 0.0276 | 0.045 | 0.049 |
| 58 | 0.1142 | 0.131 | 0.143 | 0.0512 | 0.080 | 0.088 | 0.4961 | 0.048 | 0.060 | 0.0433 | 0.105 | 0.119 | |
| 66 | 0.1535 | 0.142 | 0.182 | 0.0748 | 0.069 | 0.110 | 0.4961 | 0.187 | 0.219 | 0.0315 | 0.344 | 0.376 | |
| 73 | 0.1535 | 0.154 | 0.199 | 0.0827 | 0.136 | 0.194 | 0.5000 | 0.355 | 0.394 | 0.0443 | 0.502 | 0.557 | |
| 28 | 0.0941 | 0.031 | 0.037 | 0.0980 | 0.083 | 0.083 | 0.2353 | 0.025 | 0.034 | 0.0153 | 0.098 | 0.147 | |
| 37 | 0.0471 | 0.022 | 0.026 | 0.0392 | 0.040 | 0.046 | 0.2039 | 0.078 | 0.098 | 0.0118 | 0.151 | 0.233 | |
| Fuzzy | 43 | 0.0510 | 0.030 | 0.036 | 0.0667 | 0.079 | 0.092 | 0.1961 | 0.035 | 0.042 | 0.0129 | 0.024 | 0.027 |
| 58 | 0.0314 | 0.045 | 0.049 | 0.0353 | 0.051 | 0.061 | 0.2118 | 0.050 | 0.063 | 0.0114 | 0.058 | 0.071 | |
| 66 | 0.1020 | 0.074 | 0.105 | 0.0706 | 0.059 | 0.098 | 0.2039 | 0.196 | 0.228 | 0.0431 | 0.425 | 0.463 | |
| 73 | 0.1647 | 0.178 | 0.220 | 0.0863 | 0.143 | 0.206 | 0.2118 | 0.362 | 0.400 | 0.0667 | 0.552 | 0.598 | |
Estimación de la fracción de cobertura de la vegetación en el desarrollo del cultivo
La fracción de vegetación se determina en la imagen como la relación de pixeles clasificados como vegetación y los pixeles totales del área delimitada (Torres-Sánchez et al., 2014). En la imagen en escala de grises, obtenida a partir de cada uno de los IV, se clasificaron los pixeles en vegetación y suelo con los umbrales calculados por los diferentes métodos en el programa de código abierto bajo licencia GNU de sistema de información geográfica (QGIS) con el empleo de la herramienta calculadora raster, los valores por arriba del umbral se clasificaron como vegetación (Figura 1), mientras que los valores por debajo del umbral se clasificaron como suelo o viceversa, de lo que se obtuvo una imagen binaria.
Se seleccionaron ocho sitios de muestreo distribuidos al azar en el cultivo, seis sitios con área de 1 m2 y una planta, un sitio con área de 44.5 m2 y 165 plantas, y otro sitio con área de 9.5 m2 y 48 plantas (Figura 1). En cada sitio de muestreo se determinó la fracción de cobertura de vegetación para cada fecha de vuelo. En forma manual se digitalizaron los pixeles que pertenecían a vegetación y los pixeles que pertenecían a suelo, se midió el polígono cubierto con vegetación y se dividió entre el área total del polígono en cada ortomosaico, durante el desarrollo del cultivo con el programa QGIS. De esta manera fue obtenida la fracción de cobertura observada (FCO). La fracción de cobertura estimada (FCE) se calculó a partir de la imagen binaria generada con el índice y umbral, en QGIS se empleó la herramienta histograma zonal para el conteo de los pixeles que corresponden a vegetación y pixeles de suelo; la FCE correspondió a los pixeles clasificados como vegetación entre el total de pixeles del polígono de muestreo.
Análisis de datos y validación de la fracción de cobertura estimada
Para el análisis de la fracción de cobertura estimada con los métodos de umbralización e índices de vegetación se comparó con la fracción de cobertura observada, para lo cual se calculó la raíz cuadrada del error cuadrático medio (RECM) y el error absoluto medio (EAM) con los datos observados y estimados en los polígonos de muestreo.
donde: N es el número de polígonos validados, | (Es)i | es el valor absoluto de Es, Es la diferencia entre FCE (fracción de cobertura estimada) y FCO (fracción de cobertura observada).
RESULTADOS Y DISCUSIÓN
Desempeño de los índices de vegetación y métodos de umbralización en la extracción de la vegetación
En el Cuadro 3 se presenta el tiempo de cómputo en el procesamiento de la información para estimar la fracción de cobertura de la vegetación. El tiempo de recolección de imágenes durante los diferentes vuelos fue de 5 a 17 min, menor número de imágenes se capturan a menor tiempo de vuelo; el mayor tiempo (2.41 a 6.1 h) se consumió en el procesamiento de imágenes y generación de ortomosaicos, mientras que el menor tiempo de procesamiento fue en el cómputo de índices de vegetación (0.22 a 19.85 s) y umbralización (0.181 a 5.995 s). El índice EXG consumió más tiempo de cómputo durante el proceso de normalización, mientras que el método Otsu presentó menor tiempo durante la obtención del umbral.
En el Cuadro 4 se presentan el umbral por cada fecha de vuelo e índice de vegetación, el error medio absoluto y la raíz cuadrada del error medio cuadrático obtenido a partir de las ocho muestras. Los índices analizados para extraer la vegetación presentaron errores bajos en la extracción de la vegetación en las primeras etapas de desarrollo; es posible emplearlos para conocer la germinación, densidad de población y vigor inicial del cultivo, mientras que después de los 66 días después de siembra los errores se incrementaron debido a la sombra generada por el propio cultivo y por la presencia de mayor cantidad de pixeles mixtos, sin una clara diferenciación si pertenecen a suelo o a vegetación. El índice EXG durante el desarrollo del cultivo presentó errores menores al 5 % en la clasificación de la vegetación con el método Fuzzy hasta los 58 días después de siembra, mientras que con los otros métodos de umbralización errores menores al 5 % se obtuvieron hasta los 37 días después de siembra, en los que se encontraron errores absolutos medios en el intervalo de 2.2 a 17.8 %. El índice NGRDI presentó un error absoluto medio de 1.3 a 20 %, mientras que errores menores (1.8-13.6 %) se obtuvieron con el método IsoData. Hunt et al. (2005) encontraron que el NGRDI es sensible en las primeras etapas antes del cierre de la cobertura del dosel.
El índice TGI presentó error medio absoluto comprendido entre 2.3 y 36.2 % en la fracción de la vegetación estimada, errores menores (2.4 a 13.1 %) se presentaron con el método de conservación de momentos y error menor al 10 % se presentó en etapa temprana de crecimiento. Resultados similares encontraron Hunt et al. (2013) con alta interacción con el índice de área foliar (IAF) cuando éste es bajo, mientras que a IAF y cierre del dosel alto el TGI se vio afectado. Mayores errores (2.4 a 55.2 %) se presentaron en la estimación de la fracción de la vegetación con el índice del cultivo en las diferentes etapas de crecimiento; por otra parte, Rundquist et al. (2001) indicaron que valores máximos de VARI, correspondientes a valores máximos de cobertura, están relacionados con el inicio de la etapa reproductiva. Aunque no existen diferencias amplias entre los métodos de umbralización con respecto al error medio absoluto, el método Otsu presentó menor error absoluto medio en la estimación de la fracción de cobertura.
Cobertura de la vegetación observada y estimada en el desarrollo del cultivo
De acuerdo con el Cuadro 4 y la Figura 2, los índices EXG (Figura 2a) y NGRDI (Figura 2b) subestiman la fracción de cobertura durante el desarrollo del cultivo y presentan menor error en las primeras etapas, mientras que el índice NGRDI con el método de conservación de momentos sobrestima la fracción de cobertura hasta los 58 días después de siembra. El índice TGI (Figura 2c) con el método de umbralización de momentos subestima, mientras que Otsu, Isodata y Fuzzy sobrestiman la fracción de cobertura de la vegetación. El índice VARI sobrestima (Figura 2d) la fracción de cobertura con todos los métodos de umbralización analizados, además de presentar mayores errores (Cuadro 4). En la Figura 3 se presenta la cobertura para una densidad de cinco plantas m-2 (Figura 3a), cuatro plantas m-2 (Figura 3b) y la fracción de cobertura de plantas individuales en el desarrollo del cultivo (Figuras 3c y 3d). En las Figuras 3a y 3b se observa una relación positiva entre densidad y fracción de cobertura de vegetación, que presenta crecimiento exponencial después de 43 días después de siembra, mientras que en plantas individuales se observa incremento en la fracción de cobertura lineal en el desarrollo del cultivo.

Figura 2 Fracción de cobertura observada y estimada con índices de vegetación y métodos de umbralización. a) cobertura estimada por el índice EXG y algoritmos de umbralización, b) cobertura estimada por el índice NGRDI y algoritmos de umbralización, c) cobertura estimada por el índice TGI y algoritmos de umbralización, d) cobertura estimada por el índice VARI y algoritmos de umbralización.

Figura 3 Fracción de cobertura de la vegetación en el desarrollo del cultivo. a) cobertura observada y estimada para una densidad de cinco plantas m-2, b) cobertura observada y estimada para una densidad de cuatro plantas m-2, c) y d) cobertura observada y estimada en el desarrollo de una planta de maíz hasta los 73 días después de la siembra.
CONCLUSIONES
Se encontraron errores menores en la estimación de la FCV en las primeras etapas de desarrollo del cultivo. El índice EXG presentó errores entre 2.2 y 17.8 % en la estimación de la fracción de cobertura de la vegetación durante el desarrollo del cultivo, errores menores al 5 % se obtuvieron mediante el umbral calculado con el método Fuzzy hasta los 58 días después de siembra. El índice NGRDI y el método IsoData presentaron errores en la estimación de la cobertura entre 1.8 y 13.6 %, el índice TGI presentó errores de 2.4 a 13.1 % con el método de conservación de momentos, mientras que el índice con menor desempeño en la estimación de la cobertura fue el índice VARI. Se obtuvo mayor fracción de cobertura a mayor densidad de población, que se incrementó a los 44 días después de siembra. Con las imágenes de alta resolución obtenidas a partir del UAV se estimó la cobertura vegetal con errores menores al 5 % durante las primeras etapas del desarrollo del cultivo del maíz.

