











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
Con la aparición de las imágenes satelitales, el avance y alcance de los estudios ambientales en el mundo se potenció enormemente (Campbell y Wynne, 2011; Cohen y Goward, 2004). Esto se debió a que las imágenes satelitales contienen información sobre algunas características de la superficie terrestre y permiten contar con un registro histórico de estas (Aplin, 2005; Chambers et al., 2007; Melesse, Weng, Thenkabail y Senay, 2007; Miller y Rogan, 2007; Wang, Franklin, Guo y Cattet, 2010b). Por ello, este tipo de información consiste en la principal fuente de información para hacer estudios de mediano-largo plazo y a escalas desde locales hasta mundiales (Foody, 2003; Pettorelli et al., 2018; Turner et al., 2003).
Dentro de la gama completa de imágenes satelitales que actualmente existen, la misión Landsat representa un hito en el uso de imágenes satelitales multiespectrales para el estudio de la Tierra, ya que representa el registro histórico de imágenes más longevo (Markham y Helder, 2012). Adicionalmente, la liberación del archivo Landsat en 2008 aseguró que se convirtiera en uno de los conjuntos de imágenes más utilizados (Wulder, Masek, Cohen, Loveland y Woodcock, 2012; Wulder et al., 2008). La misión Landsat comenzó con el lanzamiento del satélite Landsat 1 en 1972; hoy en día cuenta con los satélites Landsat 7 y 8, y se planea continuar con la puesta en órbita en 2023 del Landsat 9 (NASA, 2018; Wulder et al., 2016).
Las aplicaciones de las imágenes Landsat incluyen el monitoreo de bosques (Banskota et al., 2014; Butler, Mouchot, Barale y LeBlanc, 1990; Cohen y Goward, 2004); de especies invasoras (Gavier-Pizarro et al., 2012); de biodiversidad (Gillespie, Foody, Rocchini, Giorgi y Saatchi, 2008; Turner et al., 2003); de actividad volcánica (Mia, Fujimitsu y Nishijima, 2017), salud de los bosques (Wang et al., 2010a); de la atmósfera (Moawad, Youssief y Madkour, 2017); de glaciares (Man, Guo, Liu, Dong y 2014); de incendios (Schroeder, Wulder, Healey y Moisen, 2012); de cambio de uso de suelo (Hermosilla, Wulder, White, Coops y Hobart, 2017), de cuerpos de agua (Anderson, Allen, Morse y Kustas, 2012), suelo (Li, Ti, Zhao y Yan, 2016), de sedimentos (Boettinger et al., 2008); de la fenología vegetal (Baumann, Ozdogan, Richardson y Radeloff, 2017); de enfermedades transmitidas por vectores (Berrozpe et al., 2018), del crecimiento urbano (Cano Salinas, Rodríguez Laguna, Valdez Lazalde, Acevedo Sandoval, y Beltrán Hernández, 2017) y de la clasificación de tipos de cobertura urbanas (Li, Du, Samat, Xia y Che, 2015), entre otras.
Las imágenes a utilizar para cualquier análisis deben de cumplir con ciertos criterios que aseguren que la información sea de la mejor calidad posible. Dos de los criterios más frecuentemente empleados para seleccionar imágenes son: 1) que contengan información de la reflectancia de la superficie terrestre para la mayoría de la escena (por ejemplo, bajo porcentaje de nubosidad), y 2) una vez realizado el enmascaramiento de nubes y sombras en una imagen, que esta contenga la menor cantidad de artefactos. Tradicionalmente esta selección se hace de manera manual, ingresando al sitio de descarga (por ejemplo, EarthExplorer), desplegando, evaluando, seleccionando y descargando las imágenes, lo cual llega a implicar semanas de consulta y procesamiento. Esto representa una dificultad para realizar pruebas o estudios sobre áreas muy grandes o lapsos de tiempo extensos. Sin embargo, Google Earth Engine permite obtener mejores resultados gracias a tres ventajas (Gorelick et al., 2017): 1) acorta enormemente el tiempo de procesamiento debido a su enorme capacidad de cómputo, 2) pone a disposición de cualquier usuario el acervo disponible de imágenes Landsat y muchas otras fuentes como imágenes MODIS (24/02/2000 al presente), Sentinel 1 (03/10/2014 al presente), 2 (23/06/2015 al presente), 3 (18/10/2016 al presente) y 5 (04/07/2018 al presente) y modelos de elevación (Shuttle Radar Topography Mission (SRTM), 11/02/2000 al 22/02/2000), y 3) permite hacer consultas sobre los metadatos de las imágenes. Por ello, la aparición de esta herramienta ha permitido obtener evaluaciones que, de otra manera, resultarían imposibles de hacer como evaluar la deforestación a nivel global entre 2000 y 2017 (Hansen et al., 2013) o caracterizar el cambio de uso de suelo mundial en los últimos treinta y cuatro años (Song et al., 2018).
México es un país sin una plataforma satelital de observación propia, por lo cual depende enteramente de los esfuerzos de otros países u organizaciones que cuenten con dichas plataformas y acervos de imágenes (DOF, 2015; López Salas, 2010; SE, PROMÉXICO, SCT y AEM, 2018). En este contexto surge la necesidad de conocer cuál es la disponibilidad de imágenes Landsat para estudiar el territorio mexicano y la ventana temporal con la que se puede contar con información confiable. Esto es particularmente importante en el contexto del cambio global donde los estudios de mediano y largo plazo permiten identificar, entender y proyectar diferentes tendencias de cambio sobre grandes superficies terrestres.
OBJETIVO
El objetivo de este estudio es describir y analizar el potencial del acervo disponible de imágenes Landsat para México en la plataforma Google Earth Engine. Adicionalmente, pretende fomentar el uso de esta herramienta para obtener y procesar imágenes Landsat, mediante la provisión de un script gratuito.
MATERIALES Y MÉTODOS
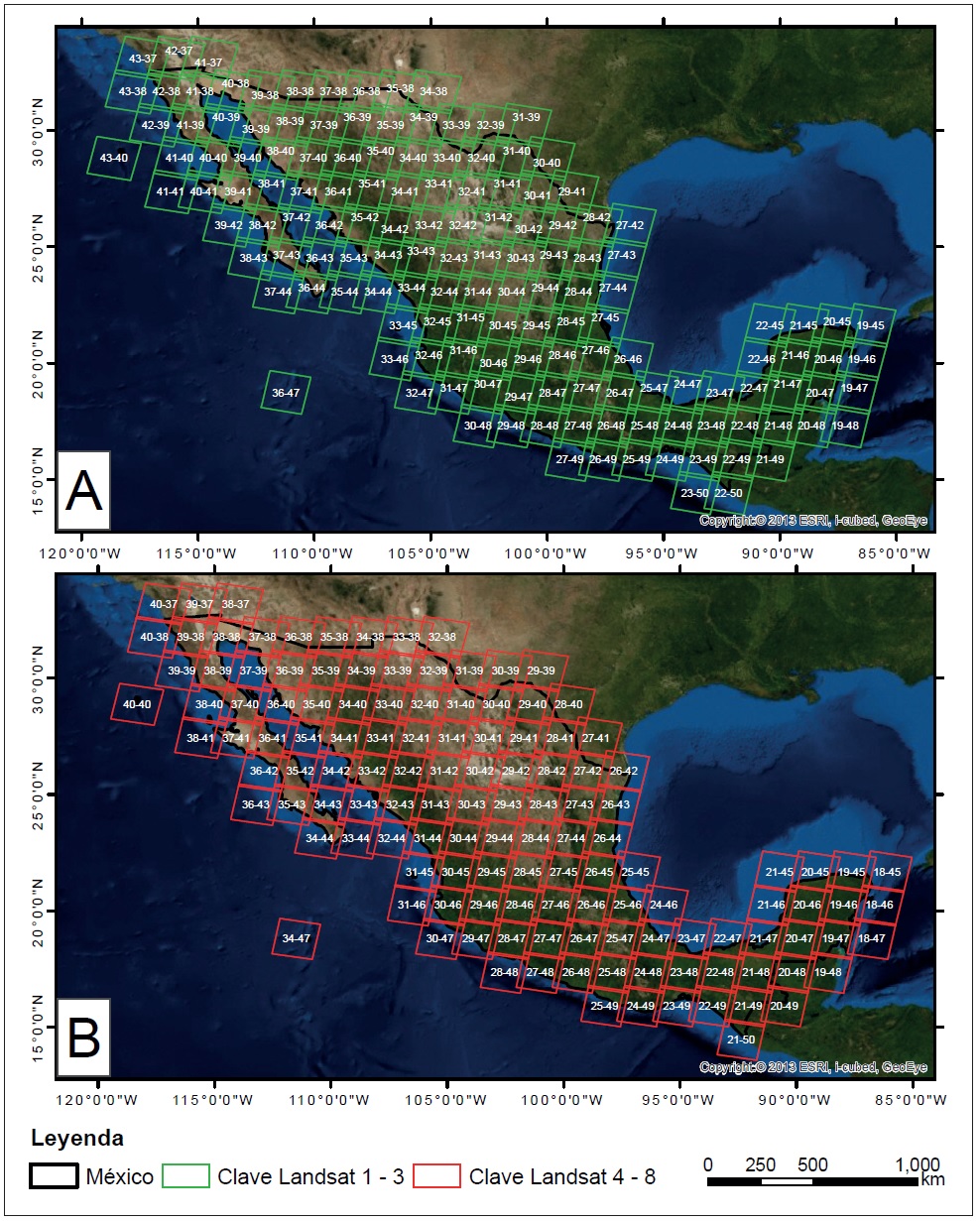
Se consultaron todas las imágenes disponibles en Google Earth Engine registradas por los sensores Landsat 1-5 Multispectral Scanner (MSS), Landsat 4-5 Thematic Mapper (TM), Landsat 7 Enhanced Thematic Mapper Plus (ETM+) y Landsat 8 Operational Land Imager (OLI) + Thermal Infrared Sensor (TIRS) que cubrieran el territorio mexicano entre 1972 y 2017. La consulta se realizó mediante un código programado en JavaScript utilizando las colecciones de mayor calidad (Tier 1) de imágenes crudas (Raw scenes) y la división política estatal oficial (INEGI, 2010). Como valores de referencia se consultaron las claves de los pases de las imágenes Landsat de los sensores consultados para desechar los pases nocturnos (Figura 1). Con el fin de caracterizar las principales diferencias entre los sensores Landsat, se hizo un cuadro comparativo de las principales características de cada sensor (Cuadro 1).
Fuente: elaboración propia con datos de USGS (2019b) y Esri (2009).
Figura 1 Claves de path / row de las imágenes Landsat que cubren México. A) Claves para Landsat 1-3. B) Claves para Landsat 4-8.
Cuadro 1 Características básicas de los sensores Landsat 1-8. Se muestra el intervalo de longitud de onda (linicial - lfinal) al que es sensible cada sensor, así como el correspondiente nombre de la banda. Las abreviaturas del nombre las bandas son las siguientes: CB = coastal blue (azul de l corta), B = blue (azul), Pan = panchromatic (pancromática), G = green (verde), R = Red (roja), NIR = near infrared (infrarrojo cercano), SWIR = short wave infrared (infrarrojo de onda corto), MIR = Mid - infrared (infrarrojo medio), TIRS = Thermal infrared (infrarrojo térmico).
| λ inicial (μm) |
λ final (μm) |
Banda | Landsat | ||||||||
| 1 MSS | 2 MSS | 3 MSS | 4 MSS | 4 TM | 5MS | 5 TM | 7 ETM+ | 8 OLI + TIRS | |||
| 0.43 | 0.45 | CB | 1 | ||||||||
| 0.45 | 0.51 | B | 2 | ||||||||
| 0.45 | 0.52 | B | 1 | 1 | 1 | ||||||
| 0.50 | 0.68 | Pan | 8 | ||||||||
| 0.5 | 0.6 | G | 4 | 4 | 4 | 4 | 4 | ||||
| 0.52 | 0.6 | G | 2 | 2 | 2 | ||||||
| 0.52 | 0.9 | Pan | 8 | ||||||||
| 0.53 | 0.59 | G | 3 | ||||||||
| 0.6 | 0.7 | G | 5 | 5 | 5 | 5 | 5 | ||||
| 0.63 | 0.69 | R | 3 | 3 | 3 | ||||||
| 0.64 | 0.67 | R | 4 | ||||||||
| 0.7 | 0.8 | R | 6 | 6 | 6 | 6 | 6 | ||||
| 0.76 | 0.9 | NIR | 4 | 4 | 4 | ||||||
| 0.85 | 0.88 | NIR | 5 | ||||||||
| 0.8 | 1.1 | NIR | 7 | 7 | 7 | 7 | 7 | ||||
| 1.36 | 1.38 | Cirrus | 9 | ||||||||
| 1.57 | 1.65 | SWIR1 | 6 | ||||||||
| 1.55 | 1.75 | NIR2 | 5 | 5 | 5 | ||||||
| 2.08 | 2.35 | MIR | 7 | 7 | 7 | ||||||
| 2.11 | 2.29 | SWIR2 | 7 | ||||||||
| 10.6 | 11.19 | TIRS1 | 10 | ||||||||
| 10.4 | 12.5 | Thermal | 6 | 6 | 6 | ||||||
| 10.4 | 12.6 | Thermal | 8 | ||||||||
| 11.5 | 12.51 | TIRS2 | 11 | ||||||||
| Resolución visible (m) | 60 | 60 | 60 | 60 | 30 | 60 | 30 | 30 | 30 | ||
| Resolución térmica (m) | 120 | 120 | 60 | 100 | |||||||
| Resolución Pan (m) | 15 | 15 | |||||||||
| Periodo inicial de actividad | 1972 | 1975 | 1978 | 1982 | 1993 | 1999 | 2013 | ||||
| Periodo final de actividad | 1978 | 1983 | 1983 | 1993 | 2011 | Presente | Presente | ||||
Fuente: elaboración propia con información de Chander, Markham y Helder (2009) y Young et al. (2017).
Para cada imagen se extrajeron los siguientes datos: sensor, porcentaje de cobertura de nubes sobre la superficie terrestre, fecha de adquisición y clave del pase (path / row), de acuerdo con el World Reference System 1 y 2 (USGS, 2019b). El sensor ETM+ (Landsat 7) presentó una falla en el corrector de línea de escaneo (Scan Line Corrector; SLC) en el año 2003, lo cual provocó la presencia de franjas con ausencia de datos en dichas imágenes, las cuales pueden afectar aproximadamente entre un 7 % (centro de la imagen) y 38 % (cerca de los bordes) de la superficie de interés (Trigg, Curran y McDonald, 2006). Por ello se distinguió entre las imágenes con dicho componente funcionando (SLC-on) y no (SLC-off). A partir de la información obtenida de la consulta se calculó la frecuencia de imágenes disponibles por el año de captura y tipo de sensor, así como sus características de porcentaje de nubosidad sobre la superficie terrestre y la clave de la imagen (path / row). El procesamiento de los datos de las imágenes se realizó en R 3.5.1 (R Core Team, 2018).
Por último, se generó un script de código abierto para obtener un mosaico de las fechas que el usuario desee consultar del país. En dicho script se incluye la explicación en español para cada variable y función. Algunas de las variables que se pueden indicar en dicha rutina son el área de interés, el valor máximo deseado de cobertura de nubes sobre superficie terrestre por imagen, la fecha inicial y final de la consulta, función para construir el mosaico promedio (mínimo, máximo, media, mediana, moda y media de determinado intervalo de percentiles de la distribución) y sensores a utilizar para crear el mosaico (Landsat 4 TM, 5 TM, 7 ETM+ o 8 OLI). Dicha rutina se programó para trabajar con la colección mayor calidad de reflectancia de la superficie terrestre (Tier 1 surface reflectance), la cual es la colección de mayor precisión espacial y nivel de procesamiento. Cabe mencionar que en Google Earth Engine también se pueden consultar los acervos de imágenes Landsat de imágenes crudas (Raw scenes) y reflectancia en la superficie de la atmosfera (Top-of-atmosphere reflectance) y de imágenes con menor precisión espacial (Tier 2) o cuasi tiempo real (Real-Time). Para poder utilizar el script solo se requiere de un registro en https://earthengine.google.com/ y, una vez que la cuenta de Google sea aprobada, se sugiere consultar la ayuda de la plataforma. La rutina programada para hacer la consulta de las imágenes y construir un mosaico anual de la reflectancia de la superficie se puede consultar en Anexo 1. Además, se hizo un pequeño tutorial sobre cómo utilizar la rutina para crear el mosaico (Anexo 2).
RESULTADOS Y DISCUSIÓN
Acervo disponible de imágenes Landsat sobre el territorio mexicano
El volumen total de imágenes disponibles para México de 1972 a 2017 fue de 89 649 imágenes, equivalente a un aproximado de 28.41 TB (calculado utilizando los siguientes tamaños por imagen y sensor: L1-5 MSS, 25 MB; L4 -5 TM, 175 MB; L7 ETM+, 275 MB; L8 OLI, 990MB). Al analizar las imágenes por sensor se observó que los dos sensores que tuvieron el registro más extenso fueron Landsat 5 TM con 38 897 imágenes (43.39 % del total), seguido de Landsat 7 ETM+ SLC-off con 31 254 imágenes (34.86 % del total) y Landast 8 OLI con 12 796 imágenes (14.27 % del total). Por el contrario, los sensores con el menor número de imágenes fueron Landsat 4 MSS, con tan solo 5 imágenes disponibles, seguido de Landsat 3 con 6 imágenes y Landsat 5 MSS con 11 imágenes. Este bajo número probablemente se deba a una o varias de las siguientes causas: falta de cumplimiento de los estándares de precisión geoespacial para formar parte de la colección Tier 1 (USGS, 2019a); ausencia de una cobertura mundial por parte de las antenas receptoras (sobre todo en los periodos más antiguos); omisión de un protocolo correcto de almacenamiento y de provisión de las imágenes a la USGS (Wulder et al., 2016). Por ello, a pesar de que todos los satélites Landsat registraron imágenes de todo el globo, su disponibilidad actual por región puede ser muy dispar (Wulder et al., 2016). Cabe destacar que la disponibilidad de imágenes de los sensores Landsat 1-3 encontrada fue extremadamente baja, únicamente entre 6 y 51 imágenes disponibles por sensor en todo el periodo analizado. A partir de la aparición del Landsat 4 se puede observar una disponibilidad de imágenes mayor. Todos los sensores a partir de Landsat 4, exceptuando los MSS (por ejemplo, Landsat 4 TM, 5 TM, 7 ETM+ y 8 OLI.), presentaron por lo menos 960 imágenes en el periodo de la consulta (Cuadro 2).
Cuadro 2 Número de imágenes por sensor de México en el periodo 1972-2017.
| Sensor | Número de imágenes |
| 1 | 51 |
| 2 | 47 |
| 3 | 6 |
| 4 MSS | 5 |
| 4 TM | 960 |
| 5 MSS | 11 |
| 5 TM | 38 897 |
| 7 ETM+ SLC-off | 31 254 |
| 7 ETM+ SLC-on | 5622 |
| 8 OLI | 12 796 |
Fuente: elaboración propia.
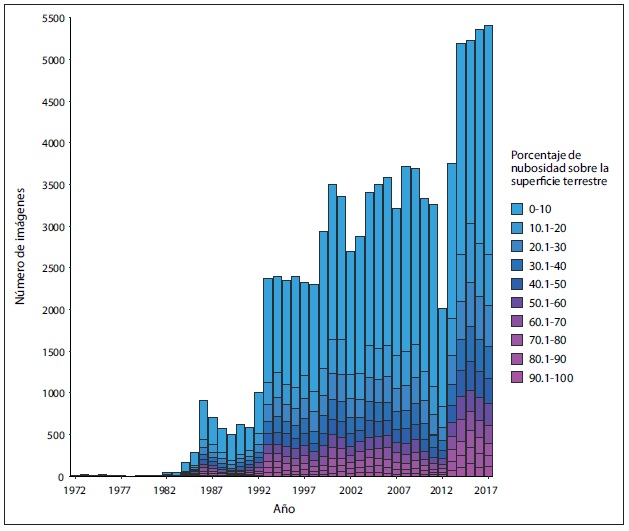
Al analizar el número de imágenes disponibles por año se observó una tendencia de aumento en el número de imágenes disponibles para el país con el tiempo. Generalmente, el aumento dramático en el número de imágenes disponibles correspondió con el inicio de actividades de algún satélite Landsat, como fue el caso de los años 1984 (Landsat 5), 1999 (Landsat 7) y 2013 (Landsat 8, Figura 2). Por el contrario, la disminución del número de imágenes disponibles coincidió con el cese de operaciones de algún satélite, como fue el caso del año 2012 (Landsat 5). Un caso particular fue el año 1993, cuando el Landsat 4 cesó operaciones y el Landsat 6 no pudo ser puesto en órbita; a pesar de ello se observó un aumento en la disponibilidad de imágenes, debido, probablemente, a la aparición de la regulación de las imágenes Landsat, en el cual la USGS centralizó el almacenamiento del archivo Landsat (Wulder et al., 2008).

En términos generales, el archivo de imágenes tuvo un grado de nubosidad bajo-intermedio, ya que más de la mitad de las imágenes presentaron menos de 50 % de condiciones de nubosidad sobre la superficie terrestre (Figura 3). Esto puede tener diferentes grados de afectación dependiendo de la naturaleza del estudio. Por ejemplo, para estudios enfocados en cuantificar tipos de coberturas y su dinámica en periodos anuales o mayores, este grado de nubosidad permite obtener mosaicos anuales homogéneos (Griffiths, van der Linden, Kuemmerle y Hostert, 2013). Sin embargo, para otro tipo de estudios, como los enfocados a cuantificar cambios estacionales como la fenología, este porcentaje de nubosidad en las imágenes puede representar un serio problema, ya que requieren de mediciones muy frecuentes (Reed, Schwartz y Xiao, 2009). En este caso se necesita una evaluación manual de las condiciones de nubosidad sobre el área de estudio. A pesar de ello, existen estudios de esta naturaleza que han utilizado imágenes de otros sensores para complementar la información de las imágenes Landast (por ejemplo, Baumann et al., 2017; Campos-Taberner et al., 2016; Pagani et al., 2019) o inclusive otro tipo de sensores remotos (por ejemplo, radar; De Bernardis, Vicente-Guijalba, Martinez-Marin y Lopez-Sanchez, 2016). Finalmente, cabe resaltar que sin importar la naturaleza del estudio, en los últimos años resulta más factible obtener ya sea un mosaico homogeneo para cualquier región del país o una serie de tiempo con mayor número de mediciones, debido a la mayor disponibilidad de número de imágenes por año.
Fuente: elaboración propia.
Figura 3 Frecuencia de imágenes por año y condiciones de nubosidad sobre la superficie terrestre.
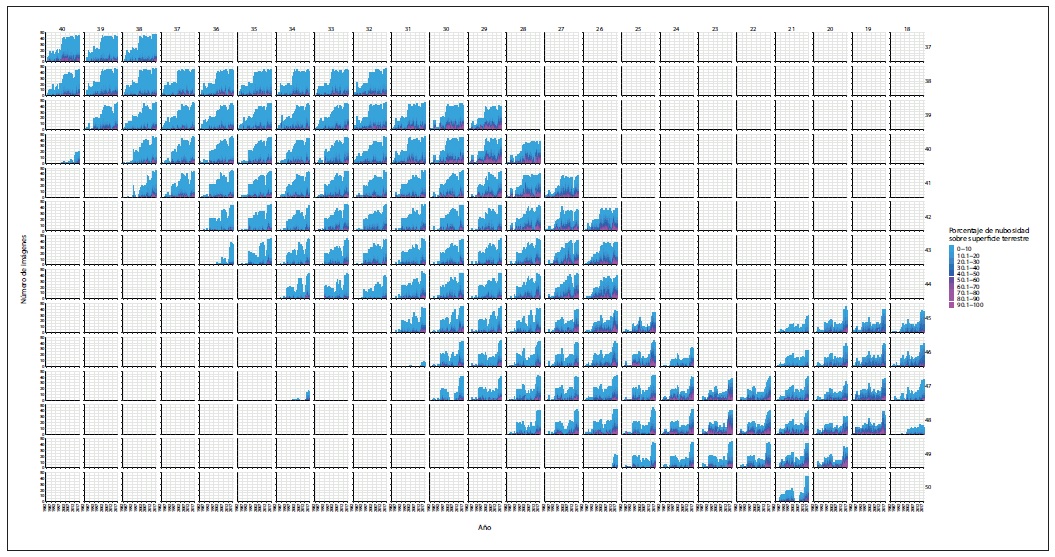
Al analizar las condiciones de nubosidad de las imágenes por combinación de path / row se observó un patrón en el cual las imágenes de latitudes más septentrionales presentaron condiciones muy bajas de nubosidad, mientras que las de latitudes más meridionales presentaron condiciones de nubosidad mucho mayores (Figura 4). Esto correspondió a las condiciones de precipitación que predominan en el país, ya que el norte es mucho más árido que el sur. La presencia de nubes en las imágenes se concentró en la época de lluvias en el país (mayo-octubre). Esto es un factor importante a considerar para estudios enfocados en la vegetación, ya que se recomienda utilizar las imágenes del periodo de crecimiento para cuantificar algunas de sus características (Hansen et al., 2013). Sin embargo, esta temporada corresponde también a la de mayor nubosidad. Es por ello que para los estudios interesados en la vegetación es importante considerar una disyuntiva entre enfocarse en obtener imágenes de la temporada de crecimiento y las condiciones de nubosidad que pueden presentar las imágenes.
Fuente: elaboración propia.
Figura 4 Frecuencia de imágenes por año en los path (borde superior) y row (borde derecho) que cubren México en el periodo 1972-2017 (Landsat 4-8).
Un total de 146 claves de path / row para Landsat 1-3 cubrieron la extensión total del país. Al analizar el número de imágenes por clave de path / row para las claves de Landsat 1-3, se observó que el mayor número de imágenes registradas entre 1972 y 1981 fue de entre 1 y 6 imágenes al año, con un promedio de menos de una imagen por año para todos los path / row. Esto quiere decir que para la mayor parte del país existe una ausencia absoluta de imágenes Landsat 1-3, por lo cual resulta imposible obtener información en esos años. Para las pocas imágenes disponibles en dicho periodo se debe hacer una consulta manual para ver si pueden ser utilizadas o no. Sin embargo, debido a estas características se consideró que la posibilidad de utilizar imágenes en el periodo de Landsat 1-3 para el estudio del país resulta muy baja antes de 1981.
Por otro lado, para Landsat 4-8 un total de 134 claves de path / row cubrieron la totalidad del territorio mexicano, lo cual representa 12 claves de imágenes menos que las claves de imágenes de Landsat 1-3. A partir de 1982, año en el cual es puesto en órbita el Landsat 4 y posteriormente el Landsat 5 en 1984, se observó una tendencia dramática del aumento en la disponibilidad de imágenes por año (véase Figura 4). Durante la primera década de funcionamiento de Landsat 4 y 5 (1982 -1992), se observó un máximo de 27 imágenes por path / row y un promedio anual de 7.49 imágenes por clave de imagen en 1992, mientras que la disponibilidad de imágenes fue menor a 3 imágenes por año y un promedio de 0.29 (en 1982). A partir de 1993, esta cifra aumentó a un promedio de 17.71 imágenes por año, hasta llegar a 40.32 imágenes al año por path / row en el año 2017. El mínimo de imágenes por año y clave de imagen en el periodo 1982-2017 fue de cero en todos los años, a excepción de 2013-2017, cuando esta cifra tomó valores entre 1 y 7. Esto se debió a que hubo dos claves de imágenes que presentaron una ausencia de registros en los primeros años de en años posteriores a 1982: los path / row 40-40 a partir de 1999 y 31-46 a partir de 2001. Por otro lado, el máximo número de imágenes disponibles al año por path / row fue de 46 imágenes, presente en el periodo 2014-2017.
A pesar de que el número de imágenes por path / row al año con el que se cuenta en la actualidad es alto (aproximadamente 40 imágenes), el número de observaciones útiles para un área determinada suele ser mucho menor debido a cuatro razones: 1) al utilizar únicamente las imágenes que presenten un porcentaje bajo de nubosidad de las imágenes determinado se eliminan del análisis un número considerable de imágenes; 2) casi la mitad de estas imágenes contienen áreas sin información provocadas por la falla del SLC en Landsat 7 (SLC-off); 3) a pesar que una imagen tenga un bajo porcentaje de nubosidad, algunas áreas se encuentran gran parte del año cubiertas por nubes (como es el caso de bosques húmedos), y 4) las máscaras de nubes y sombras no funcionan a la perfección (Foga et al., 2017), por lo cual, a veces, es necesario eliminar otra porción de las observaciones para disminuir las aportaciones de artefactos como nubes y sombras para crear mosaicos homogéneos (Robinson et al., 2017). A pesar de que el algoritmo CFMASK es actualmente el más adecuado para la detección de nubes y sombras de nubes, puede presentar errores dependiendo del tipo de cobertura y grado de nubosidad (Foga et al., 2017). Para el caso de la identificación de nubes se han reportado errores de omisión de 0.09-13.41 % y comisión de 5.9-28.99 % (precisión de 64.09-94.07 %), mientras que para las sombras de nubes, los errores de omisión pueden presentar valores de 4.86-35.99 % y comisión, 0.95-5.02 % (precisión 93.96-98.19 %; Foga et al., 2017). A pesar de estos errores, contar con un acervo de mayor volumen y calidad permitirá obtener mejores productos a partir de las imágenes Landsat. Por ello, el lanzamiento del Landsat 9 representa un paso más en esta dirección.
Google Earth Engine
En la plataforma, tanto la consulta de todos los metadatos como la creación de un mosaico anual se obtuvo en menos de 10 segundos. Esto ejemplifica el enorme potencial de esta herramienta. La enorme capacidad de procesamiento de datos se debe esencialmente a dos factores: 1) los datos se encuentran disponibles en la nube de Google y el usuario únicamente accede a ellos y después puede descargar el producto deseado y 2) la capacidad de paralelizar diferentes procesos entre los servidores de Google. Tal velocidad de procesamiento permite probar diferentes parámetros para la construcción de mosaicos.
En la plataforma se puede acceder a la información con distintos grados de procesamiento, por lo cual se puede optar por trabajar desde imágenes poco procesadas o productos terminados. Esto le da a Google Earth Engine una amplia gama de aplicaciones, ya que puede ser utilizada tanto para el desarrollo de algoritmos o productos, como para la consulta de datos o para realizar algunas operaciones espaciales. Entre los acervos que se pueden consultar en dicha plataforma se encuentran las siguientes colecciones de imágenes Landsat o productos provenientes de estas: valores crudos (Raw scenes), valores de reflectancia en la superficie de la atmósfera (Top-of-atmosphere reflectance) o reflectancia de la superficie (Surface reflectance), algunos índices espectrales (por ejemplo, NDVI, NDWI, EVI, NDSI, NBRT, BAI, entre otros) o índices integrados en determinados intervalos de tiempo (por ejemplo, 8 días, 32 días, anual). Adicionalmente, de las primeras tres colecciones se pueden consultar tres tipos de colecciones dependiendo de su precisión espacial y fecha de adquisición (i.e., Real-Time, Tier 2, Tier 1). Por su parte, algunos de los productos terminados disponibles en la plataforma incluyen la pérdida de cobertura arbórea 2000-2018 (continuamente actualizado), evaluaciones de la productividad primaria, identificación de cuerpos de agua, determinación de cobertura de manglares, caracterización de determinados datos climáticos, entre otros (para consultar la lista completa se puede visitar el sitio https://earthengine.google.com/datasets/). Por último, si el usuario desea implementar algún índice espectral no disponible en la plataforma, su puesta en marcha resulta casi instantánea, ya que únicamente se tiene que definir una nueva función con la fórmula del índice y aplicarla al conjunto de imágenes deseado.
Otra gran ventaja de la plataforma radica en que los códigos se guardan en la sesión de cada usuario y se pueden realizar otro tipo de procesamientos como filtrado, algebra de mapas, cálculo de métricas de textura, métodos basados en objetos, cálculo de mapas de costo, reproyecciones, cálculo de estadísticas de imágenes, clasificaciones, entre otras. En la propia página de Google Earth Engine se pueden consultar tutoriales y ejemplos.
Una de las principales limitantes para el uso de esta plataforma radica en que, a pesar de ser una plataforma hecha para facilitar el acceso a datos georreferenciados de diversas áreas (climática, reflectancia, radar, topografía, entre otras), requiere de un conocimiento básico de programación y de la sintaxis del lenguaje a utilizar (JavaScript o Python). Cabe mencionar que la plataforma basada en JavaScript resulta más amigable para el usuario, ya que su uso únicamente requiere de un navegador y conexión a internet, presenta una interfaz gráfica y la mayoría de los documentos de la ayuda están diseñados para el uso de la plataforma con JavaScript. Por el contrario, para utilizar la plataforma basada en Python se requiere de la instalación de varios componentes en la computadora y la ayuda para este lenguaje disponible directamente desde Google Earth Engine no es tan vasta como la que se encuentra para JavaScript. Independientemente de la plataforma que se elija, las imágenes procesadas se pueden exportar únicamente en formato GeoTiff o TFRecord. El primer formato es uno bastante común con el que seguramente la mayoría de los usuarios estarán familiarizados. Por el contrario, el formato TFRecord consta de un formato de tensores (Tensor Flow Record) que facilita el trabajo con series de tiempo o arreglos de bandas, debido a que constan de arreglos multidimensionales (por ejemplo, una serie de tiempo de un índice de vegetación correspondería a un tensor de tres dimensiones), pero puede resultar un formato confuso para quién no esté familiarizado con el manejo de tensores. Por último, la plataforma cuenta con un modelo de programación cliente-servidor, por lo cual es recomendable leer sobre la diferencia entre la sintaxis particular de cada uno de estos lados (por ejemplo, cliente o servidor), así como tomar los tutoriales de la plataforma. Para conocer más a detalle el potencial completo y funcionamiento de Google Earth Engine se puede consultar Gorelick et al. (2017).
Otra de las limitaciones del uso de Google Earth Engine radica en que la cantidad de datos que se pueden subir y descargar de la nube dependen del espacio que cada usuario tenga disponible en su cuenta (aunque siempre se puede pagar por mayor capacidad de almacenamiento). A pesar de ello, algunas de las limitaciones más serias implican: 1) dependiendo de la carga de trabajos que tenga el servidor de Google Earth Engine, un mismo proceso puede tomar tiempos muy distintos, inclusive a veces dar errores debido al tiempo demorado; 2) como lo menciona en sus términos de servicio, Google Earth Engine puede dejar de dar el servicio en cualquier momento sin ninguna indemnización para los usuarios, y su permanencia en el futuro no es asegurable, ya que no forma parte de alguna institución gubernamental, y 3) las actualizaciones de la plataforma pueden provocar que rutinas previamente creadas no funcionen correctamente.
El uso de Google Earth Engine ha ido en aumento con el paso del tiempo, a partir de su aparición en 2011 (Kumar y Mutanga, 2018). Sin embargo, todavía se puede considerar que es una herramienta poco popular en el contexto mundial, y en el caso de México, su uso ha sido muy limitado o prácticamente nulo (Kumar y Mutanga, 2018). Debido a que las imágenes Landsat representan el acervo continuo más grande de imágenes de la superficie terrestre, con una resolución espacial alta (alrededor de los 30 m) y temporal de entre 8 y 16 días por sensor, su utilidad para el estudio de la dinámica de los procesos que sufre la superficie es indudable. Al combinar el poder de cómputo de Google Earth Engine con la disponibilidad del catálogo de imágenes Landsat, se pueden realizar todo tipo de estudios. Algunos ejemplos realizados con las imágenes Landsat y Google Earth Engine incluyen: aplicaciones sobre la dinámica en zonas urbanas (Patel et al., 2015; Ravanelli et al., 2018; Trianni, Angiuli, Lisini y Gamba, 2014); dinámica de cambio de uso de suelo (Alonso, Muñoz-Carpena, Kennedy y Murcia, 2016; Huang et al., 2017; Lee, Cardille y Coe, 2018); algoritmos de enmascaramiento de nubes (Mateo-García, Gómez-Chova, Amorós-López, Muñoz-Marí y Camps-Valls, 2018); identificación de tipos de vegetación y uso del suelo (Dong et al., 2016; Johansen, Phinn y Taylor, 2015; Lee, Wich, Widayati y Koh, 2016; Tsai et al., 2018; Xiong et al., 2017); monitoreo de sedimentos superficiales (Markert et al., 2018); estimación de la productividad primaria y rendimiento de cultivos (He et al., 2018), y monitoreo de la fenología de la vegetación (Robinson et al., 2017), entre otros.
México a futuro
El número tan bajo de imágenes Landsat disponibles antes de 1993 para el país se debió sobre todo a razones administrativas, de compartición de datos, disponibilidad de antenas, capacidades de almacenaje y de digitalización del material (Wulder et al., 2016). Esta circunstancia demuestra la importancia que tiene para un país contar con infraestructura que permita una soberanía informática en términos de creación, recepción y almacenamiento de información satelital. Contrario al caso de México, países que contaban con dicha infraestructura en el pasado reciente, poseen un mayor número de imágenes disponibles para su territorio y con más años de antigüedad (por ejemplo, EE. UU., Canadá, Australia, Japón; Wulder et al., 2016). En este contexto, la reactivación y recepción de imágenes (Landsat y otras) en la antena ERIS-Chetumal representa un primer esfuerzo en esta dirección. Además, esfuerzos de este tipo abren la posibilidad de utilizar imágenes para un monitoreo lo más cercano al tiempo real.
Actualmente, México depende totalmente de otros países y otras agencias espaciales para proveerse de información satelital (DOF, 2015, y cuenta únicamente con satélites de comunicaciones, por lo cual el desarrollo de algún tipo de satélite destinado a la observación de la superficie terrestre se ve como un evento lejano. Sin embargo, el desarrollo de estas tecnologías, como lo han hecho otros países, como India, Nigeria, Argentina o Brasil, es una actividad que ha comenzado a impulsarse en años recientes (SE et al., 2018). De esta manera, se espera que el desarrollo de las tecnologías espaciales y la infraestructura necesaria, además de la formación de capacidades humanas, permitirán el uso de tecnologías satelitales para el monitoreo de la superficie de México.
CONCLUSIONES Y RECOMENDACIONES
Este estudio reveló la disponibilidad real de imágenes Landsat para el estudio del territorio nacional entre 1972 y 2017. A pesar de que en teoría existe una disponibilidad de imágenes en este periodo para México, la realidad es que el acervo es prácticamente nulo para la década de 1970, y a partir de la década de 1980 la disponibilidad de imágenes presenta varios aumentos importantes hasta llegar al 2017, año donde se observó el mayor número de imágenes por año. De manera general, este estudio pretende guiar a los futuros usuarios de la plataforma en algunos de los parámetros a esperados, por ejemplo, el número de imágenes esperado por path / row por año, o considerar el número de imágenes por año que cumplirán con cierta restricción de porcentaje de nubosidad. Adicionalmente, este estudio pretende fungir como un primer acercamiento a Google Earth Engine para diversos usuarios en el país y facilitar su posterior uso. Se invita a los usuarios de la plataforma a revisar qué tipo de productos se encuentran disponibles en cada una de las fuentes de datos, ya que existen muchos productos listos para utilizar en cualquier aplicación.

