











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1 Introduction
The Graph Partitioning Problem (GPP), is a well-known NP-hard [10], combinatorial optimization problem that has been addressed with a large number of different techniques [4]. One of the reasons why the GPP is probably so popular is because it arises in several practical cases [6]. For instance, it has been used for the mesh partitioning in simulators that apply the finite element and/or the finite volume paradigms, in the implementation of parallel software, and in the design of circuit layouts, among others.
Solving the GPP means finding a partition of the vertexes of a given graph that fulfill a balance constraint among the sizes of the different subsets and at the same time minimizes the number of cut edges, i.e. the number of edges that run between vertexes of different subsets. Note that, in the related literature, the terms subset, parts and classes are used to refer to each one of the groups of vertexes established by the partition. Thus, any of these concepts are used indifferently in this paper.
In many of the applications of the GPP quite large graphs arise [14]. Given the complexity class of the GPP, exact solvers, such as some based on quadratic programming formulations [11], are nowadays not applicable to practical graphs. As a result, several heuristics and metaheuristics have been proposed with the aim of obtaining high-quality approximate solutions for such large cases. Initially, several constructive and improvement heuristics were devised [15]. While they are fast, the quality of the obtained partitions is not so large. Subsequently, trajectory-based metaheuristics were adapted to deal with the GPP [3], reaching much higher quality solutions at the cost of an increase in the required computational budget. Finally, nowadays hybrid population-based metaheuristics lead the attainment of high-quality solutions. In fact, most of the best-known solutions that have been attained for the instances that are maintained in the graph partitioning archive [13], have been obtained with population-based approaches. Particularly, memetic algorithms that combine an Evolutionary Algorithm (EA) with local search or with trajectory-based metaheuristics seem to be the most promising approaches [8].
There are several problems that are closely related to the GPP. One of them is the Frequency Assignment Problem (FAP). In the FAP, a set of partitions must also be identified. However, the objective is related to minimizing the number of edges that appear between vertexes that belong to the same class, instead of vertexes that belong to different classes [1]. In any case, some of the ideas that are used in the optimization of the FAP can be applied to the GPP. In a recent research [25] a novel memetic algorithm could provide an important advance in the solving of the FAP. In fact, several new best-known solutions could be attained for some well-known benchmarks. The most important novelty of the solver was the application of a mechanism to explicitly control the diversity of the population. Particularly, the main aim is to lose the diversity in a controlled way that depends on the stopping criterion set by the user. In this way, shorter stopping criteria induce a faster convergence.
The hypothesis behind the development of this research is that the kinds of mechanisms that provide benefits in the FAP might also help in the development of optimizers for the GPP. We based our hypothesis on two aspects. First, on the similarities that exist between the current optimizers for the FAP and GPP. Second, in the fact that state-of-the-art population-based approaches reach convergence of the population in relatively few generations. For instance, in [8], only 200 generations are evolved because after such number of generations all the individuals of the population are located in a similar region and no further improvements are obtained with larger executions. Since the appearance of premature convergence in typical EAs seems to be a key for the success of the schemes that control the diversity in an explicit way, applying variants of this proposal seems truly promising. Note that another particular feature of the method developed in [25], is that it applies a computationally expensive local search with a large neighborhood and ad-hoc crossover operators. As a result, the memetic algorithm developed in this paper also considers a hill climber with a large neighborhood [22] and a newly designed crossover operator adapted to the GPP.
Experimental validation has been performed with a set of test cases of the well-known graph partitioning archive. Particularly, 15 graphs with up to
The rest of the paper is organized as follows. The mathematical formulation of the GPP is presented in Section 2. Related work is discussed in Section 3. Our novel proposals are detailed in Section 4. Section 5, is devoted to our experimental validation. Finally, our conclusions and future work are presented in Section 6.
2 Graph Partitioning Problem: Mathematical Definition
This section provides a formal definition of the GPP [2]:
— Let
— In the following
— Let
— The feasible search space for the problem is the set of partitions
— Finally the function to minimize in the GPP is:
The experimental validation of this paper takes into account the instances present in the Chris Walshaw’s Graph Partitioning Archive [13]. In these instances, all the weights are equal to 1, so the objective is to minimize the number of conflicting edges. Moreover, the archive reports results for distinct values of
3 Related Work
This section is devoted to reviewing some of the works that are closely related to our approaches. First, among the large set of EAs that have been used to tackle the GPP, some of the ones that have obtained the most promising results, as well as the ones that share several features with our proposal are discussed. In addition, since our proposal is based on controlling the diversity explicitly, the most popular techniques that have been devised with the aim of alleviating the effects of premature convergence are summarized. Some of these techniques are used to validate our proposal.
3.1 EAs for the GPP
A large amount of population-based metaheuristics has been designed to deal with the GPP [4]. Among them, EAs are probably the most popular approaches. Since the initial proposals [5], it was clear that incorporating a procedure to intensify in the regions located by the EA was quite important. In most of the initial algorithms, the heuristic proposed by Kernighan and Li was taken into account [15].
This heuristic is an inexpensive process that attains competitive partitions. More complex ways of intensifying have been defined with the increase of the computational power. In some cases, EAs are integrated with trajectory-based strategies [8], whereas in other ones, hill-climbers with larger neighborhoods are applied [22]. These kinds of approaches imply the use of additional computational resources, but they have allowed improving further the best-known solutions in several large graphs. Thus, in our proposal, the relatively complex neighborhood defined in [22], is taken into account.
The design of proper crossover operators has also implied large research efforts. In the initial approaches, general operators such as the uniform and/or the n-point crossover were applied [17]. However, it was soon clear that these operators were quite disruptive. Particularly, they had a tendency to create quite unbalanced partitions, meaning that after the balancing mechanisms, the offspring might share just a few features with their parents [4]. An attempt to avoid this issue was devised in [6]. In this case, the vertexes that share the same class in both parents maintain their class in the offspring.
Then, the remaining vertexes are set by using a greedy constructive heuristic that ensures a proper balance. One fact that is not taken into account in the previous operator is that the specific class identifier of a vertex is not really important. The important features are related to the set of vertexes that share the same class. Taking this into account, more complex crossover operators that are based on inheriting these kinds of features have been devised [9, 8]. The principle behind these schemes is to transmit large sets of vertexes that share the same class between parents and offspring. In [8], a greedy approach based on maximizing intersections is used. More complex non-greedy proposals were previously suggested in [9]. However, in this last case, it was applied to the graph coloring problem and not to the GPP. Since these kinds of operators have reported really promising results, our proposal also takes this principle into account. Particularly, some of the ideas suggested in [9], inspired the development of our novel crossover operator.
However, our operator also induces the creation of relatively balanced partitions in the offspring, which is an important feature in the GPP but not in the graph coloring problem.
Finally, an important issue that has not been studied in depth is the management of diversity. However, some of the analyses show that the proper control of diversity might be an issue for the proper performance. In [8], the number of generations was limited to 200. Authors argue that after this number of generations, all the individuals are located in the same region and that further improvements are not expected with larger executions. Additionally, in many cases, some actions to delay the convergence are included. For instance, in [5] offspring substitute the most similar parent, whereas resorting to restarting mechanisms when convergence is detected is another typical approach [19].
3.2 Control of Diversity in EAs
Since our approach incorporates a novel way of controlling the diversity, this subsection discusses some of the most popular strategies that have been designed with the aim of avoiding premature convergence. Particularly, the techniques that have been used in the experimental validation of our proposal are described. Readers are referred to [28] for additional techniques and for more complete descriptions. Note that, a large number of techniques to deal with premature convergence have been devised [20].
The methods are usually classified in base of the component of the EA that they modify in the following groups [28]: selection-based, population-based, crossover/mutation-based, fitness-based, and replacement-based. Additionally, depending on the number of altered components, they are referred to as uniprocess-driven or multiprocess-driven. Although the development of multiprocess-driven schemes might result in higher-quality solutions, currently most of the efforts have been placed on the design of uniprocess-driven strategies. Controlling several related stochastic components simultaneously is much more complex, so probably for this reason multiprocess-driven schemes are not so popular. As a result, our proposal is a uniprocess-driven strategy. Among the different strategies, the replacement-based methods have reported quite promising results with several optimization problems [26, 23]. Since our novel proposal belongs to this category, three additional replacement-based schemes are taken into account in this paper:
— The Restricted Tournament Selection [12], (RTS) is a popular steady-state scheme in which after each new individual (
— In the Hybrid Genetic Search with Adaptive Diversity Control [29] (HGSADC), individuals are sorted by their contribution to diversity and by their original cost. Then, the rankings of the individuals are used to calculate a score using two parameters (
— The clearing strategy (CLR) [21] is an extension of fitness sharing and it alters both the fitness assignment procedure and the replacement selection phase. In the clearing procedure, individuals are grouped into niches — defined via the parameter
Note that, in addition to these techniques, a generational scheme with elitism [7], (GEN_ELIT) is also incorporated in our experimental validation. This replacement phase does not incorporate any special mechanism to delay convergence. However, since it is one of the mostly applied strategies, it was taken into account. In GEN_ELIT the new population contains the offspring and the best solution of the previous generation.
4 Proposal
Our proposal (MAHMBCDP) is an EA that incorporates a local search strategy. The general algorithm is a quite standard Memetic Algorithm (see Algorithm 1). The only modification to the general approach is the incorporation of a balancing strategy to fulfill the GPP constraints. In order to fully define our proposal, the genetic operators, balancing operator, local search and replacement strategy must be described. The next subsections details each of these components.

4.1 Crossover Operator
As usual, the crossover operator takes two individuals and generates two new ones with some similar features to the parents. Many of the crossover operators that are used for the GPP are inspired in those developed for the graph coloring problem. Our proposal considers a newly designed crossover operator, the Hungarian Based Crossover (HBX) — see Algorithm 2 — that is inspired by the one devised in [9]. Particularly, it is based on the principle of maximizing the number of nodes that share the same class both in the parents and offspring.

The HBX operator works as follows. Let
The permutation
4.1.1 Main Properties of HBX
Previously to giving the specific crossover procedure, it is important to discuss some of the properties that share the offspring. Let
For each
The reason behind the use of
Taking these properties into account, it can be stated that operators that share these properties are not very destructive operators. This because property 2) focuses on inheriting together large subsets of vertexes that were assigned to the same subset in both parents. Finally, the principle behind the third property, is to avoid an excessive imbalance in the sizes of the newly generated subsets. However, note that some imbalance usually appears, so a method to properly balance the subsets is required.
4.1.2 Construction
This section is devoted to present the specific algorithm used to build two offspring that fulfill the aforementioned properties. Let

In order to generate the second offspring, the order in which rows and columns are considered is exchanged, i.e. the even iterations take into account the columns, whereas the odd iterations take into account the rows. Note that regardless of the order considered, both individuals share the same properties described above.
In Fig. 1 the evolution of HBX for a specific individual is shown. In this case,
In the last image, the union of the sets with the same color represents an element in the new partition,
Another important fact of the novel operator is that no information belonging to the GPP definition was used in the design. Thus, this crossover operator might be used in any optimization problem in which sharing the same value in different variables is an important feature.
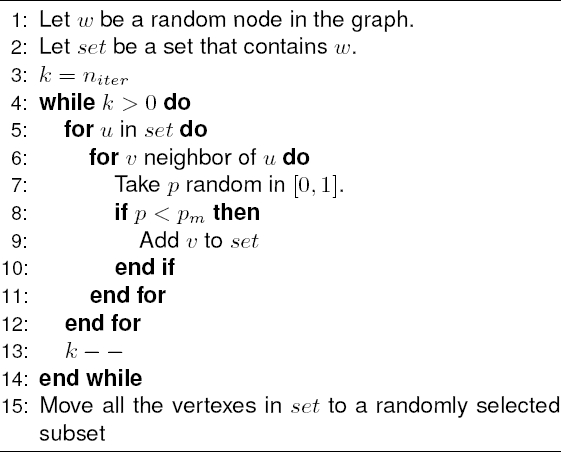
4.2 Mutation Operator
In the GPP it is desirable to keep connected components together in one subset of the partition. The reason is that connected components encapsulates common edges, meaning that lower cut edges might be induced. Taking this property into account, the principle of the mutation operator is to move parts of connected components from one subset to another one. In order to select this subcomponent, the same approach than the one presented in [25] is applied. Then, the selected vertexes are moved to a set
4.3 Balancing Operator
The balancing routine consists of two phases and it is very important because of the problem’s balancing restriction. This restriction might not be valid after the application of the crossover and/or mutation operator so it has to be restored. The procedure that is in charge of this process is given in Algorithm 4.
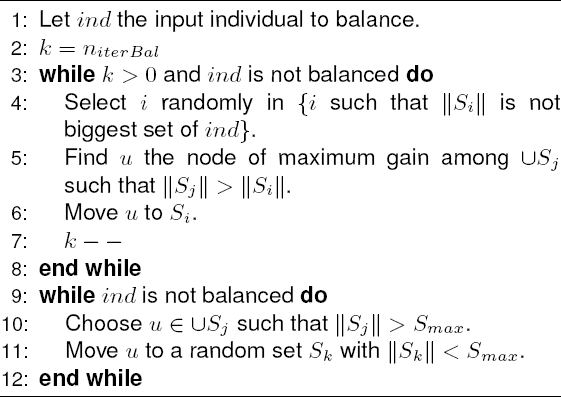
In the first phase, nodes are moved from larger to smaller sets by taking into account the implications of the move on the edge cut. This process is repeated
The second phase, which ensures the attainment of a properly balanced solution, moves randomly selected nodes from sets that do not fulfill the given restriction to subsets where there is space available.
4.4 Local Search
In order to create individuals with better fitness, a local search algorithm was added. This routine is performed after the balancing procedure and it consists of two phases.
In the first phase, the strategy that is called the “perfectly balanced local search by negative cycle detection” in [22] is carried out. The principle behind this algorithm is to find a cycle of negative gain and move the nodes around it. In this way the balance is kept and the fitness is diminished.
The second phase is a stochastic hill climbing. For this routine two individuals are neighbor if their only difference is a swap in an edge. It means, if
4.5 Survivor Selection
Our memetic algorithm applies a novel replacement phase which is called the Best-Non-Penalized (BNP) survivor selection strategy (see Algorithm 5). One of the principles of the BNP strategy is to avoid the selection of too close individuals. Specifically, the approach tries to avoid the selection of pairs of individuals that are closer than a

In each execution of the survivor operator
Note that the principles of BNP are similar to the ones that guided the design of the Replacement with Multi-objective based Dynamic Diversity Control strategy(RMDDC) [25]. The main difference is that in RMDDC the same importance is given to quality and diversity, so a multi-objective selection is used. In the case of GPP, due to the high computational cost associated with some components, not too many generations can be evolved. Thus, the incorporation of an additional bias towards high-quality solutions that is performed in the BNP strategy is mandatory to obtain high-quality solutions with the stopping criterion set in our analyses.
An important fact that should be noticed is that the survivor operator requires a distance-like function between individuals. In this case, a function based on the Hungarian Algorithm is used. Let
5 Experimental Validation
In this section, the experiments conducted with our proposal (MAHMBCDP) are described. Since our proposal is a stochastic algorithm, each execution was repeated 30 times and comparisons were carried out by applying a set of statistical tests. A similar guideline as the one applied in [24] was used. Specifically, the following tests were applied, assuming a significance level of 5%. First, a Shapiro-Wilk test was performed to check whether or not the values of the results followed a Gaussian distribution.
If so, the Levene test was used to check for the homogeneity of the variances. If samples had equal variance, an ANOVA test was done; if not, a Welch test was performed. For non-Gaussian distributions, the non-parametric Kruskal-Wallis test was used to test whether samples are drawn from the same distribution. The following section describes the set of benchmarks and experiments that have been taken into account to validate our proposal.
Our approach involves the setting of some parameters. The population size was set to 50, the crossover probability
Our validation involves the application of several replacement strategies in addition to the BNP strategy used in MAHMBCDP. Depending on the replacement phase, additional parameters might be required. In order to set them, some initial experiments were developed by considering some values that have reported promising results [23] in other problems, as well as some modifications of these values. The ones that obtained the best performance are the following. In the RTS,
Finally, in the BNP strategy,
5.1 Benchmark
In order to evaluate the performance of our proposal, test cases from the graph partitioning archive (TGPA) of Chris Walshaw [13], were used. This is a site that has been maintained since 2000 and includes results from most of the important partitioning software packages. The whole set is composed of 34 graphs.
The smallest graph has
In this work, the first 15 graphs in TGPA were selected. The reason is that we identified that our algorithm was not able to evolve a reasonable number of generations (more than
Table 1 Features of the graphs selected for the experimental validation
| Graph |
|
|
Graph |
|
|
| add20 | 2395 | 7462 | data | 2851 | 15093 |
| 3elt | 4720 | 13722 | uk | 4824 | 6837 |
| add32 | 4960 | 9462 | bcsstk33 | 8738 | 291583 |
| whitaker3 | 9800 | 28989 | crack | 10240 | 30380 |
| wing_nodal | 10937 | 75488 | fe_4elt2 | 11143 | 32818 |
| vibrobox | 12328 | 165250 | bcsstk29 | 13992 | 302748 |
| 4elt | 15606 | 45878 | fe_sphere | 16386 | 49152 |
| cti | 16840 | 48232 |
5.2 Analysis of Diversity
One of the most important features of our approach is that it considers the diversity explicitly. Our proposal depends on a parameter,
Particularly, five different equidistributed values were used with two instances and two different values of
Table 2 Comparison among different schemes for the 3elt graph
| 3elt | ||||||
|---|---|---|---|---|---|---|
|
|
|
|||||
| Scheme | Best | Mean | Worst | Best | Mean | Worst |
| MAHMBCDP | 201 | 201 | 201 | 1535 | 1537.1 | 1539 |
| RTS | 201 | 210 | 463 | 1538 | 1551.4 | 1569 |
| HGSADC | 201 | 262.2 | 463 | 1536 | 1546.8 | 1558 |
| CLR | 291 | 389.3 | 517 | 1601 | 1692 | 1796 |
| GEN_ELIT | 237 | 402.4 | 532 | 1545 | 1555.6 | 1569 |
Table 3 Comparison among different schemes for the uk graph
| uk | ||||||
|---|---|---|---|---|---|---|
|
|
|
|||||
| Scheme | Best | Mean | Worst | Best | Mean | Worst |
| MAHMBCDP | 41 | 45.8 | 73 | 420 | 425.2 | 430 |
| RTS | 153 | 198.73 | 249 | 444 | 460 | 489 |
| HGSADC | 119 | 187.13 | 249 | 450 | 488.1 | 532 |
| CLR | 195 | 253.2 | 329 | 585 | 625.7 | 686 |
| GEN_ELIT | 194 | 247.5 | 322 | 466 | 507.1 | 489 |
Table 4 Summary of the results obtained with different
| 0.0 | 0.2 | 0.4 | 0.6 | 0.8 | 1.0 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Instance | Mean | Best | Mean | Best | Mean | Best | Mean | Best | Mean | Best | Mean | Best |
| uk, |
193.83 | 135 | 132.9 | 44 | 73.33 | 41 | 45.8 | 41 | 43.46 | 41 | 43.467 | 42 |
| uk, |
539.2 | 492 | 445.83 | 429 | 427.2 | 421 | 425.26 | 420 | 425.767 | 418 | 425.97 | 421 |
| 3elt, |
375.9 | 270 | 201 | 201 | 201 | 201 | 201 | 201 | 201 | 201 | 201 | 201 |
| 3elt, |
1558.23 | 1544 | 1538.56 | 1534 | 1537.4 | 1535 | 1537.13 | 1535 | 1537.63 | 1535 | 1538.1 | 1536 |
For validating the BNP survivor selection integrated in MAHMBCDP, some additional popular schemes were also tested. Specifically, results were obtained with the following methods: RTS, HGSADC, CLR and GEN_ELIT. Table 2 summarizes the results obtained with the 3elt graph. Specifically, the best, mean and worst values are reported for
In order to properly understand the reasons behind the superiority of the BNP technique it is important to analyze the evolution of the diversity and fitness (cut edge). Fig. 2 shows the evolution of the diversity whereas Fig. 3 shows the evolution of the fitness for the aforementioned cases. The diversity was measured as the mean distance among all the individuals in the population.


It is noticeable that the only scheme that induces a gradual decrease in diversity is MAHMBCDP, i.e. the scheme that applies the BNP strategy.
The large diversity in the initial phases explains why MAHMBCDP does not attain very promising partitions initially. In this phase, it is looking for promising regions in the variable space but intensification is not promoted. At the end of the execution, the diversity is low, meaning that intensification is promoted in the most promising regions identified. This results in solutions of higher quality in the long term.
An interesting thing is that the decrease of diversity was not linear as we expected by decreasing
This is specially clear in the cases with
5.3 Validation with the Graph Partitioning Archive
In order to illustrate the effectiveness of the proposed memetic algorithm, test with the 15 first graphs of the Graph Partitioning Archive were performed. MAHMBCDP was tested with the values
Table 5 MAHMBCDP results for k = 4, 8
|
|
|
|||||||
| Instance | TGPA | Best | Mean | Worst | TGPA | Best | Mean | Worst |
| add20 | 1154 | 1151 | 1153.1 | 1155 | 1686 | 1681 | 1682.73 | 1685 |
| data | 382 | 382 | 382 | 382 | 668 | 668 | 668.07 | 669 |
| 3elt | 201 | 201 | 201 | 201 | 345 | 345 | 345 | 345 |
| uk | 41 | 41 | 47.37 | 81 | 84 | 83 | 86.6 | 94 |
| add32 | 34 | 34 | 34 | 34 | 67 | 67 | 67.33 | 68 |
| bcsstk33 | 21717 | 21717 | 21717 | 21717 | 34437 | 34437 | 34444.7 | 34454 |
| whitaker3 | 381 | 381 | 381 | 381 | 656 | 656 | 657.1 | 658 |
| crack | 366 | 366 | 366 | 366 | 679 | 679 | 679.07 | 680 |
| wing_nodal | 3575 | 3575 | 3578.2 | 3582 | 5435 | 5435 | 5436.93 | 5439 |
| fe_4elt2 | 349 | 349 | 349 | 349 | 607 | 606 | 607.6 | 609 |
| vibrobox | 18976 | 18988 | 19116.27 | 19268 | 24484 | 24479 | 24479.57 | 24481 |
| bcsstk29 | 8035 | 8069 | 8086.7 | 8106 | 13986 | 14001 | 14034.57 | 14084 |
| 4elt | 326 | 326 | 326 | 768 | 545 | 545 | 565.23 | 807 |
| fe_sphere | 768 | 768 | 768.07 | 769 | 1156 | 1156 | 1205.47 | 1383 |
| cti | 954 | 954 | 954 | 1178 | 1788 | 1788 | 1796.13 | 1848 |
Table 6 MAHMBCDP results for k = 64
|
|
||||
| Instance | TGPA | Best | Mean | Worst |
| add20 | 2949 | 2952 | 2961.23 | 2968 |
| data | 2839 | 2841 | 2852.03 | 2856 |
| 3elt | 1532 | 1535 | 1537.07 | 1539 |
| uk | 408 | 416 | 424.53 | 437 |
| add32 | 485 | 485 | 493.43 | 502 |
| bcsstk33 | 107185 | 107413 | 107632.23 | 107814 |
| whitaker3 | 2491 | 2505 | 2525.43 | 2538 |
| crack | 2535 | 2549 | 2560 | 2568 |
| wing_nodal | 15775 | 15781 | 15801.37 | 15821 |
| fe_4elt2 | 2478 | 2490 | 2503.27 | 2518 |
| vibrobox | 46571 | 46692 | 46820 | 46952 |
| bcsstk29 | 55241 | 55807 | 56203.93 | 56742 |
| 4elt | 2565 | 2572 | 2588.57 | 2606 |
| fe_sphere | 3543 | 3594 | 3634.03 | 3671 |
| cti | 5629 | 5697 | 5737.3 | 5787 |
Table 7 MAHMBCDP results for k = 16, 32
|
|
|
|||||||
| Instance | TGPA | Best | Mean | Worst | TGPA | Best | Mean | Worst |
| add20 | 2047 | 2041 | 2047.03 | 2052 | 2362 | 2360 | 2362.8 | 2367 |
| data | 1127 | 1127 | 1127.8 | 1128 | 1799 | 1799 | 1803.2 | 1813 |
| 3elt | 573 | 573 | 573 | 573 | 960 | 960 | 961.53 | 962 |
| uk | 146 | 148 | 153.63 | 161 | 254 | 253 | 259 | 264 |
| add32 | 118 | 118 | 118 | 122 | 213 | 213 | 213.77 | 218 |
| bcsstk33 | 54680 | 54687 | 54721.27 | 54800 | 77414 | 77508 | 77616.93 | 77824 |
| whitaker3 | 1088 | 1089 | 1090.47 | 1094 | 1668 | 1672 | 1684.8 | 1697 |
| crack | 1088 | 1088 | 1089.8 | 1091 | 1679 | 1682 | 1687.7 | 1697 |
| wing_nodal | 8334 | 8333 | 8341.77 | 8377 | 11768 | 11774 | 11793.13 | 11825 |
| fe_4elt2 | 1007 | 1008 | 1008.77 | 1010 | 1614 | 1619 | 1628.67 | 1642 |
| vibrobox | 31892 | 32428 | 32744.6 | 32920 | 39477 | 39443 | 39699.7 | 39975 |
| bcsstk29 | 21958 | 22136 | 22217.73 | 22332 | 34968 | 35130 | 35283.63 | 35533 |
| 4elt | 934 | 937 | 957.13 | 1084 | 1551 | 1554 | 1566.9 | 1597 |
| fe_sphere | 1714 | 1719 | 1875.63 | 2068 | 2490 | 2500 | 2561.3 | 2659 |
| cti | 2793 | 2799 | 2846.37 | 2895 | 4046 | 4069 | 4114.2 | 4153 |
MAHMBCDP reaches the best known solution for almost every instance for
For the larger values of
As a summary, it is quite important to remark that best-known solution could be improved further in ten cases. Taking into account that these graphs have been tackled with a very large amount of proposals, this achievement is an important proof of the proper performance of the solver designed in this paper.
6 Conclusions and Future Work
The Graph Partitioning Problem (GPP) is a well-known NP-hard combinatorial optimization problem that has been addressed with numerous optimizers. Among them, hybrid metaheuristics that combine population-based approaches with trajectory-based schemes have reported the most promising results. Recently, the state-of-the-art of some related problems could be advanced significantly by taking into account the diversity of the population in an explicit way. This paper studies the applicability of these kinds of approaches in the GPP. Specifically, a memetic algorithm that incorporates a hill-climber and a relatively large neighborhood has been designed. The proposal (MAHMBCDP) incorporates a novel replacement strategy, the best-non-penalized scheme (BNP), that is based on considering both the diversity and quality in the survivor selection phase. Additionally, an important novelty is the design of a crossover operator that is based on the principle of maximizing the number of nodes that share the same class both in the parents and offspring.
The experimental validation has been performed with test cases of the Chris Walshaw’s Graph Partitioning Archive. Comparisons against other strategies that were devised with the aim of facing premature convergence show the important benefits of the BNP strategy. It is also remarkable that in ten test cases, new best-known solutions could be attained. Taking into account the large number of techniques that have been used to deal with the GPP, this is a quite important achievement. The main drawback of the proposal is that due to the incorporation of computationally expensive components, there are issues with the scalability. Both the increase on the number of edges and the increase on the number of classes of the desired partitions provoke degradation on the performance.
Several lines of future work might be explored. First, some actions to improve the scalability might be studied. Particularly, taking into account more simple neighborhood definitions but with more complex trajectory-based schemes to intensify, seems a promising approach. Second, applying adaptive ways to manage the diversity might bring additional benefits. Finally, parallelizing the proposal to reduce the time required to obtain high-quality solutions seems a plausible approach.

