











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Es clara la importancia que tienen las redes inalámbricas de sensores (RIS) en campos tan diversos como el monitoreo ambiental, la ciencia y tecnología, seguridad, cuidado de la salud, etcétera, así como el potencial que tienen como una herramienta analítica. Parte primordial del éxito de las RIS es su versatilidad de usos, inherente a su naturaleza, ya que son capaces de implementarse en gran variedad de entornos. Su adaptación y uso de RIS en zonas urbanas se ha estudiado anteriormente con diferentes fines y gracias a nuevas tecnologías inalámbricas han logrado expandir su campo de aplicaciones y usos como bien lo detallan Rashid y Rehmani (2016). Lograr comprender el funcionamiento de las RIS ha llevado a investigadores a desarrollar simuladores de código abierto con diferentes capacidades, como se observa en las comparaciones realizadas por Saidallah et al. (2017) en donde los criterios más relevantes en los que se centran son el modelado energético, protocolos de comunicación soportados, movilidad de nodos y escalabilidad; dejando de lado en su mayoría, aspectos importantes como el entorno donde se realizan las simulaciones. Pocos son los trabajos que se centran en describir el desarrollo de un entorno 3D para la simulación de RIS y que sea representativo del lugar específico de despliegue con características similares del entorno urbano real, como se aborda en este trabajo.
Torreón, ubicado al noreste de México, es una ciudad que en conjunto con ciudades vecinas y municipios de dos estados conforman la Comarca Lagunera. Esta región es ampliamente industrializada y cada vez hay mayor concentración vehicular. Como en cualquier región altamente poblada, la calidad del aire se puede ver mermada y afectar la calidad de vida y salud de las personas. Según la Dirección General del Medio Ambiente de Coahuila y el Instituto de Políticas para el Transporte y Desarrollo (Rocha, 2015), en la zona metropolitana de la laguna hay alrededor de 260 vehículos en circulación por cada mil habitantes, donde 98 % de emisiones contaminantes provienen de automóviles. Los efectos a la salud relacionados con la contaminación atmosférica urbana están bien documentados, entre los más comunes se encuentra un aumento en el riesgo de padecer enfermedades respiratorias agudas como neumonía, así como enfermedades crónicas como el cáncer de pulmón y accidentes cardiovasculares.
En este lugar los grupos más vulnerables son los niños, ancianos y familias de bajos recursos con acceso limitado a la asistencia médica. El tema es de vital importancia, pues se estima que nueve de cada diez personas respiran aire con altos niveles de contaminantes y cerca de 7 millones de personas mueren cada año por la exposición a las partículas finas contenidas en el aire contaminado a nivel mundial (OMS, 2018). Para hacer frente a esta problemática, Torreón cuenta con un total de 9 equipos manuales y una estación automática para medir la calidad del aire en partículas suspendidas totales y partículas menores a 10 micras, además de formar parte, desde el año 2010, en un programa denominado Pro Aire Laguna y un sistema de Información Ambiental de la Administración Municipal 2014-2016 para mejorar la calidad de aire (Vargas, 2015). No obstante, para estos esfuerzos de monitoreo y control de calidad de aire en la ciudad, se requieren herramientas que permitan comunicar en tiempo real a la población sobre cuál es la calidad de aire en diversos puntos de interés y es aquí donde la versatilidad de la tecnología de RIS destaca como una alternativa altamente confiable y adaptable a entornos urbanos.
Conociendo lo anterior, se debe tener en cuenta que hay una gran cantidad de problemas que pueden surgir al usar redes de sensores inalámbricas, como problemáticas provenientes de su naturaleza inalámbrica como medio de transmisión, donde factores como la conectividad y cobertura son dos de los problemas fundamentales en las RIS como lo exponen Zhu et al. (2012). Asimismo, factores provenientes del entorno como obstáculos físicos, material de los objetos, temperatura ambiental, ruido y la topografía misma del lugar de despliegue que pueden afectar y tener impacto en el desempeño de una red inalámbrica, sin olvidar las características propias de los nodos sensores con infinidad de configuraciones técnicas y parámetros preestablecidos que dictan su comportamiento.
Por estas razones es necesario realizar estudios previos rigurosos y mediante simulaciones se permita evaluar el desempeño de la red que se está diseñando y se busca desplegar. Es aquí donde se centran los esfuerzos de este trabajo, el cual expone el desarrollo de un entorno 3D para la simulación de redes inalámbricas en la región. Además de presentar comparativas entre simulaciones y datos recolectados con RIS desplegadas, con el fin de observar la efectividad y aproximaciones de la cama de simulación 3D con datos reales.
En la actualidad, las herramientas de simulación se han convertido en una necesidad para múltiples análisis especiales dentro del campo de las RIS y con el desarrollo de esta plataforma de simulación 3D se busca respaldar y potenciar futuros esfuerzos en el diseño de redes inalámbricas en la región, lo cual permitirá atacar en primera instancia el problema del monitoreo y evaluación de contaminantes en el aire. Además es indispensable que la herramienta de simulación cuente con capacidades dentro del margen de tecnologías actuales, donde se busca una conectividad total entre dispositivos dentro y fuera de las RIS, aumentando velocidades y reduciendo considerablemente el tiempo de latencia, donde sin duda, la nueva generación de redes celulares 5G juega un papel importante en la interconectividad entre equipos gracias al advenimiento del Internet de las cosas. Parte del equipo y mobiliario urbano de las grandes ciudades quedará permanentemente conectado entre sí, facilitando la tarea de transmisión y consumo de información de cualquier tipo.
El artículo se organiza de la siguiente manera: la primera sección corresponde al desarrollo de la cama de simulación 3D, donde se muestran las herramientas de software utilizadas. La sección dos muestra un prototipo de nodos sensores, sus componentes y estructura. Posteriormente, la sección tres presenta dos casos de simulación y finalmente la discusión y análisis de los resultados comparativos entre simulaciones y datos recolectados con los prototipos de nodos sensores, así como la presentación de las conclusiones del trabajo.
Cama de simulación 3D
El modelado de ciudades virtuales 3D se han empleado para diferentes aplicaciones como en el diseño de ciudades inteligentes, planeación de infraestructura, prevención de desastres, educación, telecomunicaciones, turismo, navegación y detección de cambios como lo mencionan Sigla y Padia (2020). Generar los modelos virtuales 3D de ciudades es demandante en procesamiento y existen diversas herramientas de uso comercial que permiten la visualización de estos modelos como ARCGIS y ERDAS.
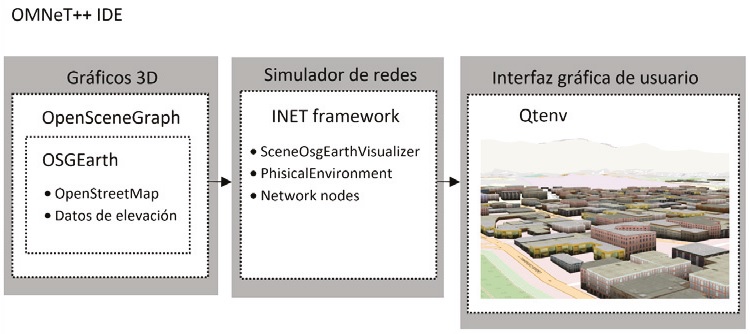
En nuestro acercamiento al desarrollo de un entorno virtual 3D para la simulación de redes se utilizan herramientas de software de uso libre y con bajo requerimiento de procesamiento como: Openstretmap, OpenSceneGraph y osgEarth. OMNeT++ e INET framework, los cuales permiten el uso de las herramientas mencionadas para integrar el mapa 2D y el entorno virtual 3D a las simulaciones de redes (Mészáros et al., 2019). Por otro lado, los datos de elevación se obtuvieron a partir de la Shuttle Radar Topography Mission (SRTM) de la NASA. La ciudad virtual 3D para simulación de redes se realizó con base en la estructura que se muestra en la Figura 1.
Para este trabajo se empleó OMNeT++, el cual se ejecutó en una maquina con Windows 10/64, 8 GB de RAM, dual-core i7 2GHz y con una tarjeta gráfica NVIDIA GeForce GT 750M.
En el artículo se hace referencia como cama de simulación 3D al producto obtenido del uso de las herramientas de software mencionadas para la representación virtual 3D y simulación de redes inalámbricas, que representa una sección de 1 km2 de la ciudad de Torreón, Coahuila, México. Esta sección describe los aspectos principales de la cama de simulación 3D, las herramientas usadas y parte de su desarrollo.
OMNeT++
A pesar de que OMNeT++ ha ganado popularidad como un simulador de redes dentro de la comunidad científica e industrial, en realidad OMNeT++ en sí mismo no es un simulador, más bien es una herramienta que provee un entorno de desarrollo, librerías y componentes, con los cuales permite principalmente construir y desarrollar simuladores de redes. Todo bajo un carácter modular y extensible.
Una gran cantidad de modelos y motores de simulación se han escrito sobre OMNeT++ por investigadores en áreas tan diversas como el tráfico de paquetes, protocolos de internet, redes inalámbricas, redes de área local, redes per-to-per, redes ad-hoc, redes de sensores inalámbricas, redes vehiculares, redes ópticas, cloud computing, y más (Mészáros et al., 2019). Bajo este paradigma modular con el que OMNeT++ se rige, se desarrolló la cama de simulación 3D, que provee la infraestructura para el desarrollo del proyecto, haciendo uso de diferentes componentes que se mencionan más adelante.
INET Framework
Uno de los modelos dentro del ecosistema de OMNeT++ ampliamente utilizado es INET Framework, que es una librería de código abierto que provee a los investigadores de protocolos, agentes y otros modelos diseñados para la experimentación con simulación de redes de comunicación. Mészáros et al. (2019), mencionan que INET Framework es uno de los más longevos y con la más grande colección de modelos de simulación para OMNeT++. Algunas características principales de INET es que permite la implementación de las capas del modelo OSI (capa física, enlace de datos, red, transporte, aplicación), protocolos de red IPv4/IPv6, protocolos de capa de transporte (TPC, UDP, SCTP), protocolos de enrutamiento, interfaces alámbricas e inalámbricas (Ethernet, PPP, IEEE 802.11, IEEE 802.15.4, etcétera), soporte para movilidad de nodos y soporte para el modelado y visualización del ambiente físico 2D/3D.
OpenStreetMap
Tener un contexto del mundo real en las simulaciones es algo siempre deseable, y más si lo que se busca es representar una determinada área urbana. OpenStreetMap ofrece datos geográficos de todo el mundo en forma gratuita y se puede definir como un proyecto colaborativo para creación de mapas que pueden ser editables en cualquier momento por la comunidad. INET Framework permite mostrar datos de osm en las simulaciones usando el IDE de OMNeT++ basado en eclipse bajo el entorno gráfico Qtenv. El área del mapa en cuestión se consume desde internet directamente de openstreetmap.org durante las simulaciones, especificando el origen de las coordenadas geográficas mediante el uso del módulo de INET OsgGeographicCoordinateSystem y los parámetros sceneLongitude y sceneLatitud. Además, si durante las simulaciones no se cuenta con conexión a internet, se carga de forma local una sección del mapa de la ciudad de Torreón.
En la Figura 2 se muestra el mapa consumido de OpenStreetMap para la cama de simulación 3D. El punto marcado en la Figura 2a corresponde al origen de la escena durante las simulaciones, con latitud 25.542150 y longitud -103.433803, mientras que la región que forman los puntos en la Figura 2b corresponde al área disponible cuando no hay conexión a internet.

OpenSceneGraph
Se usó el motor gráfico de código abierto OpenSceneGraph para la generación de modelados 3D en la escena durante las simulaciones. OSG se utiliza ampliamente en campos como la realidad virtual, realidad aumentada, educación, videojuegos y visualizaciones de índole científico. OpenSceneGraph está escrito en C++ estándar y usa el API OpenGL (Open Graphics Library) para la generación y renderizado 3D, permitiendo generar escenas tridimensionales complejas a partir de geometrías simples, como puntos, líneas y triángulos.
osgEarth
Para desplegar el mapa y entorno virtual 3D en la interfaz gráfica de usuario Qtenv durante las simulaciones se usa el motor de mapeado 3D y SDK geoespacial osgEarth, el cual hace uso de librerías de OpenSceneGraph para generar las escenas 3D. Se requiere un archivo .earth y un archivo XML donde se especifica cómo los datos de origen se incorporan dentro del mapa y especifica cómo establecer los datos consumidos generalmente desde internet. Las ubicaciones en el mapa se identifican con coordenadas geográficas como longitud y latitud. OsgEarth permite visualizar datos de elevación, entidades vectoriales y cantidades masivas de imágenes dentro del mapeado. La forma como osgEarth organiza los datos es mediante un paradigma Mapa/capa, el mapa comprende una colección de capas, que renderiza una sobre otra, desde la capa inferior hasta la superior, logrando formar una escena final (Pelican Mapping, 2021). Como primera capa en el archivo .earth se establecen los datos provenientes de OpenStreetMap, de forma local o por internet como se observó anteriormente en la Figura 2, lo que permite tener a disposición para las simulaciones un entorno 2D donde fácilmente se obtenga cualquier calle, ubicación y distancia muy aproximadas a la realidad. La siguiente capa corresponde a la generación de los modelos 3D de los edificios, esto se logra con el uso de un archivo .shp, que es un formato vectorial de almacenamiento digital utilizado para guardar la ubicación de los elementos geográficos y los atributos que estén asociados a ellos, atributos que osgEarth interpreta para generar las formas 3D. OpenStreetMap cuenta con un editor que permite delimitar áreas con ayuda de fotografías satelitales, donde se generan las formas y atributos con las que contará el archivo .shp. Atributos como posición geográfica, forma, tipo de edificio, cantidad de pisos y altura se establecen. El archivo .shp se extrae del archivo .osm con herramientas web como BBBike.org o Mygeodata.cloud. En la Figura 3 se muestra una sección del mapa en OpenSceneGraph y las formas de los edificios establecidas con el editor web.

Figura 3 Formas editables en osm para creación de archivo .shp y generación de modelos 3D de edificios
El archivo .shp comprende un área de 1 km2 que representa el área urbana dentro de los puntos geográficos que se especifican en la Figura 4a, mientras que los contornos de las edificaciones que se usaron para generar los modelos 3D se muestran en la Figura 4b.

Datos de elevación SRTM
El representar de forma realista un entorno virtual urbano con el objetivo de desplegar y simular RIS conlleva a tomar en cuenta el mapeado de la superficie de la tierra, la diferencia de alturas de elevación de un punto a otro pueden suscitar errores en el diseño de redes y en la colocación de los nodos, sobre todo si se busca implementar redes a gran escala. Tomar en cuenta este tipo de factores nos permite tener un panorama más amplio y apegado a la realidad al momento de simular y en la toma de decisiones de diseño.
Shuttle Radar Topography Mission (SRTM) fue un esfuerzo internacional liderado por la NASA y la agencia nacional geoespacial de EUA (NGA), con participación de las agencias espaciales de Alemania e Italia. El propósito de SRTM era generar un modelo digital de elevación (MDE) de la Tierra a nivel casi global, utilizando interferometría (NASA JPL, 2013). El SRTM voló a bordo del transbordador espacial Endeavor durante los 11 días que duró la misión STS-99, en febrero del 2000. Los modelos de elevación están en arreglos rectangulares, cada sección cubre 1° en latitud y 1° en longitud, nombrados de acuerdo con sus esquinas sudoestes, en total cerca de 80 % de la superficie terrestre fue cubierta. Hasta antes del 2014, la resolución de los datos sin procesar disponible fuera de USA era de 3 seg de arco. En 2015 se liberó la NASA SRTM Version 3.0 Global 1-arcsecond dataset (SRTMGL1), haciendo disponible la versión de 1 segundo de arco a escala global (Misra et al., 2018). Su raíz de error cuadrático medio (RECM) varía en rangos desde 5.9 m en áreas urbanas hasta 10.4 m en áreas boscosas (Santillan et al., 2016). En la Figura 5 se muestra el dataset SRMT1N25W104V3 y sus atributos, sección que cubre la ciudad de Torreón y parte de la región lagunera, la cual se emplea en la cama de simulación 3D.

Los datos se extraen desde earthexplorer.usgs.gov en formato .tif, el cual almacena imágenes de mapa de bits y se cargan en el archivo .earth como una capa más.
Agregando objetos físicos para la simulación
El mapa generado por osgEarth no afecta las simulaciones, solo da el contexto de un mundo real. Para que los nodos de una red interactúen con su ambiente se deben agregar objetos físicos, INET Framework se encarga de esta tarea. Con el módulo PhysicalEnvironment configurado, se representan bloques en forma de edificios u otra forma geométrica, las cuales pueden influir en las transmisiones de radio y provocar la pérdida de paquetes en las comunicaciones.
El módulo PhysicalEnvironment es responsable de colocar los objetos físicos en la escena del mapa, con la ayuda de coordenadas geográficas predefinidas en un archivo XML (INET Framework, 2020). Mientras que el modelo DielectricObstacleLoss determina la pérdida de potencia de transmisión, tomando en cuenta las propiedades dieléctricas y reflexión del material especificado, además de considerar la forma, la posición y la orientación del objeto físico (INET module, 2020).
Características de la plataforma de simulación y comparativa con otros simuladores
En la Figura 6 se muestran las principales características del área de simulación disponible. Los objetos físicos agregados para la simulación se muestran en la Figura 6a, los cuales cubren la misma área que los modelos 3D de las edificaciones generadas por OsgEarth, observadas en la Figura 4.

Figura 6 Características de la cama de simulación 3D, a) objetos físicos, b) datos de elevación SRTM, c) despliegue de nodos
En la Figura 6b se muestran los datos de elevación de SRMT que cubren un área de 111.12 km x 111.32 km. El despliegue de nodos de las redes inalámbricas, así como las transmisiones de paquetes en el medio físico y animaciones generadas por INET Framework se observan en la Figura 6c.
Redes 5G
Otra característica principal de la plataforma es la capacidad de simular redes 5G, gracias a Simu5G, basado en el Framework de OMNeT++ y siendo la evolución del popular simulador de redes SimuLTE. La idea detrás del desarrollo de Simu5G es permitir que los investigadores simulen y comparen sus soluciones y servicios con tecnologías 5G en un Framework fácil de usar y beneficiándose del concepto de modularidad de OMNeT++, además de la posibilidad de integrarse con otros módulos de INET Framework (Simu5G , 2021). Simu5G requiere OMNeT++ 5.6.2 e INET Framework 4.4.4, anunciando su lanzamiento en abril del 2021 (Simu5G team, 2021). La librería y módulos de Simu5G, la arquitectura de redes 5G y cómo Simu5G los modela, además de su integración con OMNeT++ se presenta por Nardini et al. (2020). Los mismos autores concluyen que Simu5G es una de las dos únicas librerías existentes que permiten comunicaciones complejas end-to-end a nivel de aplicación, bajo escenarios heterogéneos (junto 5G-LENA), pero es el único que permite implementaciones ENDC, FDD y comunicaciones D2D, MEC y CV2X.
Accesibilidad
Un aspecto importante a tomar en cuenta es qué tan accesible es un simulador. OMNeT++ es uno de los más completos al ser de código abierto, trabaja en Windows y Linux, este cuenta con soporte continuo y está bien documentado, además de contar con una excelente facilidad de depuración (Debugeo) y tiener una interfaz de usuario grafica a diferencia del último aspecto en simuladores como: NS−2, NS−3, ATEMU, Avrora, Castalia, SES, SENSE y TOSSIM (Saidallah et al., 2017).
Escalabilidad
Debido a las áreas extensas que se deben cubrir en un ambiente urbano es importante la cantidad de nodos que se pueden simular, OMNeT++ es capaz de soportar simulaciones de redes inalámbricas de gran escala, entre 400 hasta 2000 nodos como concluyen Khan et al. (2012), cantidad similar a simuladores como: Castalia, GloMoSim, TOSSIM, SENSE y mayor que ATEMU, Emstar, J-Sim y NS−2.
Desempeño
En términos de desempeño, OMNeT++ cuenta con un aceptable tiempo de proceso computacional, realizando procesos más rápidos que simuladores como NS−2, TOSSIM y J-Sim, pero con peor desempeño que NS−3, como concluyen Khan et al. (2014), en lo relacionado con el uso de CPU, OMNeT++ es el que mejor se comporta junto con J-Sim y en cuanto a memoria utilizada es de los que peor se comporta, solo superando a NS−2.
Ciudades 2D/3D
En la literatura disponible se pueden encontrar simuladores con representaciones de ciudades con enfoques muy específicos como simulación de tráfico y redes vehiculares Ad−Hoc (VANET) como Veins y Siafu. CupCarbon, plataforma presentada por Bonceur et al. (2018), esta se enfoca en simulaciones de RIS dedicada a ciudades inteligentes y el IoT que toma en cuenta propagaciones de radio e interferencias generadas por nodos desplegados en una ciudad digital 3D. IU-SCS (Adil et al., 2017). Es un simulador de ciudades inteligentes 3D, el cual permite evaluar costos, tiempos, recursos y cobertura de sensores en una ciudad digital 3D. La principal ventaja de la cama de simulación 3D que presentamos es que OMNeT++ es un simulador bien conocido, documentado y que permite la integración con otros simuladores con enfoques muy diversos.
Nodos sensores
Una Red Inalámbrica de sensores (RIS) está compuesta por cierta cantidad de nodos distribuídos espacialmente sobre un área determinada, equipados con dispositivos sensores para el monitoreo y medición de condiciones físicas y contaminantes en el ambiente en diferentes locaciones. La base principal de una RIS son los nodos e incorpora cuatro elementos básicos: la unidad sensora, unidad de procesamiento, la comunicación y la alimentación de poder (Vujović & Maksimović, 2014). Tanto en las simulaciones como en las pruebas realizadas que se discuten en secciones posteriores se centran aspectos de comunicación, pero es necesario también describir brevemente aspectos básicos que conforman al nodo.
En esta sección se muestra un prototipo de nodo sensor para su despliegue en zonas urbanas, se muestran brevemente sus principales características y componentes. El uso de estos prototipos de nodos sensores tiene como fin recolectar datos durante la comunicación de nodos arrojados por una serie de pruebas en pequeñas RIS y compararlos con datos obtenidos por simulación para la evaluación de la cama de simulación 3D.
Respecto a la electrónica, el nodo prototipo cuenta con cuatro elementos básicos: una tarjeta controladora, una antena externa, un sensor de CO2 y el suministro de energía. Se emplea un microcontrolador CC1350 de Texas Instruments, bajo su ecosistema LaunchPad que soporta comunicaciones Sub-1GHz + BLE. Se optó por incorporar una antena omnidireccional externa tipo "whipe" de la marca Pulse Electronics con características mostradas en la Tabla 1, datos que INET Framework permite establecer en simulación. El nodo además cuenta con un sensor de CO2 electroquímico MG811 y los nodos se alimentan de toma corrientes de 120 v con adaptadores de voltaje c.c. a 5v - 2A.
Tabla 1 Especificaciones Antena Pulse Electronics W5017
| Frecuencias | 868 - 928 MHz |
| Impedancia nominal | 50 Ω |
| Ganancia | 2 dBi |
| Radiación de antena | Isotrópica |
| Longitud | 179 mm |
A nivel estructural, el nodo está diseñado para desplegarse en ambientes urbanos donde las inclemencias del tiempo, así como impactos posibles al nodo son factores que se toman en cuenta y que pueden afectar su funcionalidad y durabilidad (Robles, 2020). En la Figura 7a se muestra una vista explosionada de la estructura externa e interna del nodo, se compone de diversas piezas de dos materiales, acrilonitrilo estireno acrilato (ASA) y aluminio anodizado. En la Figura 7b se muestra un corte de sección donde se representa el flujo del aire y la caída del agua. La tarjeta y sensores se muestran en la Figura 7c, mientras que el nodo instalado se muestra en la Figura 7d.
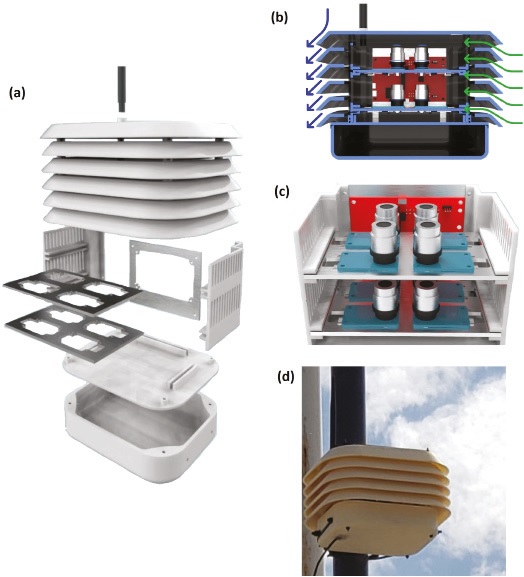
Figura 7 Estructura del nodo, a) vista explosionada, b) flujo de aire y caída de agua, c) electrónica, c) instalación
La programación de la tarjeta LaunchPad CC1350 se realizó en Energia IDE, una plataforma de código abierto para el desarrollo y programación de prototipos electrónicos fundada por Robert Wessels en 2012, con el objetivo de llevar la programación Wiring y entorno Arduino al ecosistema LaunchPad de Texas Instruments (ENERGIA IDE, 2020). Bajo el Entorno de Energia IDE se usó la librería de EasyLink Sub-1GHz para establecer las instrucciones de comunicación RF. El API EasyLink es una capa de abstracción que trabaja sobre el controlador de radiofrecuencia de las tarjetas de TI que cuentan con soporte, con intención de simplificar la creación de aplicaciones sobre los protocolos de comunicación propietarios de TI.
Parámetros RF y parámetros de simulación
En esta sección se muestran los parámetros de radiofrecuencia para la comunicación de los nodos, así como los parámetros establecidos en el simulador. Texas Instruments con el uso de la herramienta SmartRF studio permite modificar parámetros de comunicación importantes que utiliza el API EasyLink, exportando valores que especifican el protocolo utilizado, tipo de paquete y los parámetros de radiofrecuencia. Así también INET Framework cuenta con diferentes modelos de protocolos inalámbricos para su simulación.
A continuación se muestran dos casos, cada caso con configuraciones y parámetros RF diferentes. Lo que se busca con estos dos casos simples es obtener la eficiencia en la transmisión de paquetes entre nodos y el RSSI promedio a diferentes distancias para recrear y simular estas condiciones en la cama de simulación 3D.
Caso 1
El estándar IEEE 802.15.4 define la capa física y el control de acceso al medio (MAC, Media Access Control) de redes inalámbricas de área personal con tasas bajas de transmisión de datos (LR-WPAN, Low-Rate Wireless Personal Area Network). Administrado por el grupo IEEE 802.15, es un estándar ampliamente utilizado para RIS donde se requieran bajas tasas de transmisión y eficiencia en costos energéticos.
Texas Instruments tiene su plataforma para el desarrollo de aplicaciones en tarjetas CC13x0 con especificaciones del estándar IEEE 802.15.4 denominado TI 15.4-Stack. Los nodos se configuraron bajo el estándar IEEE 802.15.4 y se usó el modelo 802.15.4 de INET Framework para las simulaciones, tanto los parámetros de los nodos y los simulados se muestran en la Tabla 2.
Tabla 2 Modo estándar IEEE 802.15.4
| Parámetros del nodo |
Parámetros de simulación |
|
| Modo | IEEE 802.15.4 | IEEE 802.15.4 |
| Frecuencia | 915 MHz | 915 MHz |
| Potencia Tx | 12 dBm | 12 dBm |
| Ancho de banda | 98 kHz | 98 KHz |
| Data Rate | 50 kbps | 50 kbps |
| Modulación | FSK | FSK |
| Radiación antena | isotrópica | isotrópica |
| Ganancia antena | 2 db | 2 db |
| Altura Nodo | 6 m | 6 m |
| Distancia Tx/Rx | 25, 50, 100 m | 25, 50, 100 m |
| Background noise | - | -118 dbm |
| Obstáculos físicos | - | Concreto y follaje |
| Temperatura ambiental | - | 22° C |
Las pruebas y simulaciones se realizaron punto a punto a distancias de 25, 50 y 100 m entre transmisor y receptor, donde solo transmite un nodo sensor a la vez para evitar colisión de paquetes. La frecuencia a la que se trabaja es 915 MHz, que se encuentra en el segmento identificada como banda de uso libre para aplicaciones ICM en transmisión de datos de baja velocidad (IFT, 2006). El proceso de simulación se muestra en la Figura 8.
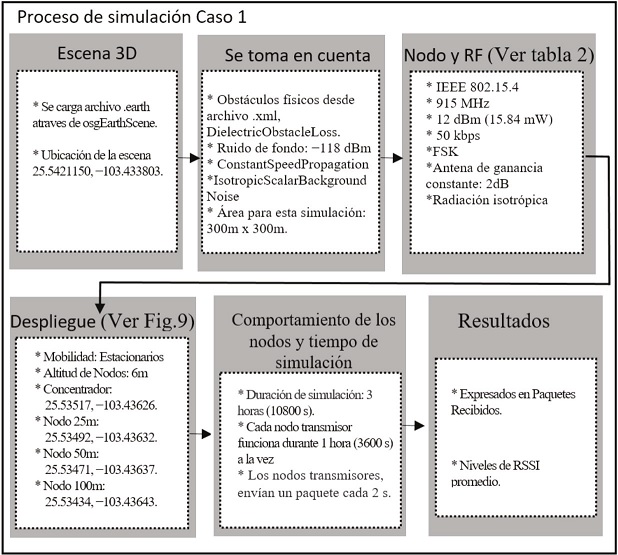
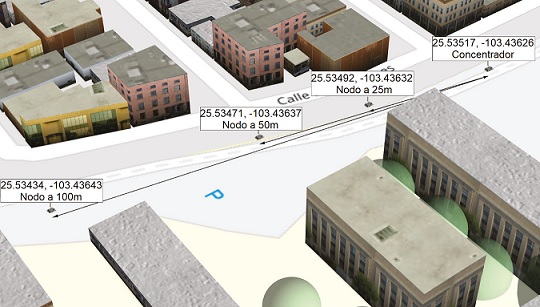
La simulación inicia al cargar la escena 3D a través de osgEarthScene con el archivo .earth descrito en secciones anteriores, se ubica en un determinado punto. Se toman en consideración factores como obstáculos físicos, atenuación de la señal de radio y el ruido de fondo en un área de 300 m x 300 m, se especifican parámetros del nodo y de radiofrecuencia y se despliegan de forma estática como se muestra de mejor forma en la Figura 9. La simulación se realiza durante 3 h, donde cada nodo transmisor funciona 1 h enviando paquetes cada 2 seg, por último los resultados se obtienen expresados en paquetes recibidos y niveles de RSSI promedio.
Caso 2
TI Legacy Long Range mode (LRM) es uno de los dos modos de largo alcance propietario de Texas Instruments, el cual utiliza una técnica de codificación para obtener ganancias de sensibilidad y difundir así los bits de información en una serie de símbolos transmitidos, con esta configuración de la capa física se prefiere disminuir la velocidad de datos para ganar sensibilidad de transmisión y recepción, este modo presenta un balance razonable entre la tasa baja de transmisión, ganancia en sensibilidad y ancho de banda. Se utiliza en aplicaciones donde no es necesario contar con tasas de transmisión altas y obtener largas distancias de trasmisión. En la Figura 10 se muestra el esquema de codificación de LRM, que consta de tres elementos: el codificador convolucional, que es una técnica para determinar errores donde la tasa está dada por el número de entradas sobre el número de salidas (para LRM, 1/2), DSSS; la técnica de ensanchamiento de banda de secuencia directa, que tiene una secuencia conocida de ensanchamiento por cada bit de información que entra en esa etapa y puede ser de 1, 2, 4, hasta 8 bits de ensanchamiento (DSSS=8), y finalmente modulador FSK, que es una modulación digital que obtiene el ancho de banda en cuanto a la frecuencia de transmisión (Hellan, 2018).

Los parámetros de los nodos y los simulados se muestran en la Tabla 3.
Tabla 3 Modo Legacy Long Range
| Parámetros del nodo |
Parámetros de simulación |
|
| Modo | Long Range Mode | - |
| Frecuencia | 915 MHz | 915 MHz |
| Potencia Tx | 12 dBm | 12 dBm |
| Ancho de banda | 39 kHz | 39 KHz |
| Data Rate | 625 bps | 625 bps |
| Modulación | FSK, DSSS=8 | FSK, DSSS=8 |
| Radiación Antena | isotrópica | isotrópica |
| Ganancia Antena | 2 db | 2 db |
| Altura Nodo | 6 m | 6 m |
| Distancia Tx/Rx | 90, 135, 200 | 90, 135, 200 |
| Background noise | - | -116 dbm |
| Objetos físicos | - | Concreto y follaje |
| Temperatura ambiental | - | 19° C |
Al ser el modo Legacy Long Range propietario de TI y no un estándar, INET no cuenta con un módulo específico para esa configuración. En la simulación a forma de aproximación se usaron los mismos parámetros RF del modo LRM, la misma modulación de espectro ensanchado por secuencia directa y el mismo tamaño del paquete transmitido. Las distancias entre Tx y Rx son de 90, 135 y 200 m. En la Figura 12 se muestra la ubicación de los nodos. El proceso de simulación se muestra en la Figura 11.

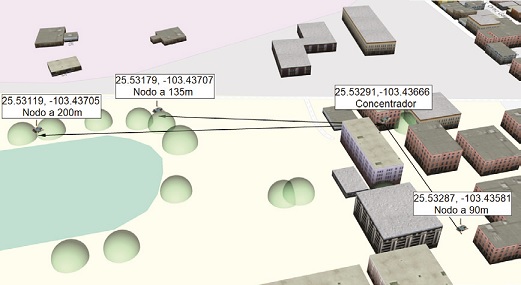
El proceso de simulación para el caso 2 es similar al que se mostró en el caso 1. Difiere en los parámetros del nodo y de radiofrecuencia, usando un codificador convolucional genérico, un ensanchamiento DSSS=8 y modulador FSK, además se toma en cuenta un área mayor de 500 m x 500 m. El despliegue de los nodos se muestra en la Figura 12.
Discusión y análisis de resultados
Los resultados obtenidos de los casos presentados se muestran a continuación. Este análisis de resultados se centra en la obtención de la eficiencia de la comunicación, que se expresa en porcentajes de paquetes recibidos para cada nodo y caso presentado, además de observar el comportamiento del nivel de RSSI promedio detectado. Para comprender un poco mejor los resultados es conveniente describir el proceso para la obtención de estos porcentajes. Los nodos de la RSI transmiten un paquete (carga útil de 2 Bytes) cada 2 s durante 1 h bajo ninguna condición, nunca transmitiendo más de un nodo al mismo tiempo, la información que envían son lecturas de CO2. Cada que se envía un paquete este se contabiliza, aumentando un contador. El concentrador se encarga de recibir el paquete y validar su estatus, si el paquete se recibe de manera satisfactoria incrementa un contador de paquetes recibidos y el nivel de RSSI detectado, esta información se almacena en una base de datos, junto con las lecturas de CO2 y el identificador del nodo transmisor. A partir de los paquetes contabilizados es como se obtienen los porcentajes de paquetes recibidos, los cuales se muestran más adelante. En las simulaciones al igual que las RIS desplegadas, los nodos transmiten paquetes cada 2 s durante 1 h al concentrador, los paquetes enviados se contabilizan y quedan registrados en un escalar de la capa de aplicación de cada nodo, el concentrador contabiliza los paquetes recibidos satisfactoriamente y se almacenan en un escalar de la capa de aplicación, a partir de estos paquetes contabilizados se obtiene el porcentaje de paquetes recibidos por el concentrador. Por otro lado, el RSSI promedio se obtiene de un vector que representa el nivel de RSSI registrado durante la simulación en la capa de aplicación del concentrador. En función a lo anterior, en la Figura 13 se muestra la eficiencia de la comunicación expresada en porcentajes de paquetes recibidos para cada nodo a diferentes distancias y el comportamiento del RSSI promedio medido para cada configuración.
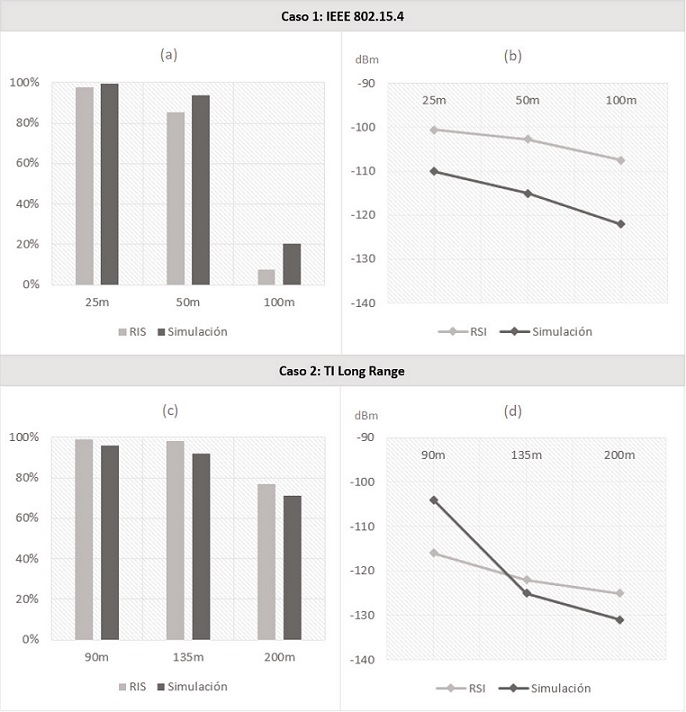
La Figura 13a y b corresponden al modo con la configuración IEEE 802.15.4. La Figura 13a muestra el porcentaje de paquetes recibidos por el nodo receptor o concentrador de un total de 1800 paquetes enviados por el nodo transmisor en las tres diferentes distancias. A 25 m la recepción de paquetes es la mejor debido a la cercanía con el concentrador, donde 97.5 % de paquetes fueron recibidos, en la simulación 99.5 % de paquetes fueron recibidos, a 50 m los paquetes recibidos disminuyen a un 86.5 % y 93.6 % en la simulación, en cuanto al nodo a 100 m de distancia se observa el peor escenario con una disminución de paquetes recibidos de 7.5 % y 20.4 %, respectivamente. Para fines prácticos y observar de mejor forma la discrepancia entre datos de la RIS y los simulados se realiza un promedio general de los porcentajes de paquetes recibidos de las tres distancias, obteniendo un 63.5 % de las RIS contra un 71.2 % obtenido en simulaciones. En otras palabras, se puede decir que los datos arrojados por los nodos y los datos de las simulaciones discrepan un 7.7 % (92.3 % de coincidencia). Siendo los 100 m donde hubo mayor diferencia entre datos obtenidos por nodos y simulados, y 25 m donde hubo menor diferencia. En cuanto al RSSI se observa que el nivel de intensidad decae a mayor distancia tanto en la RIS como en las simulaciones, un promedio de 12.1 dBm de diferencia, obteniendo niveles de intensidad peores en las simulaciones.
Las Figuras 13c y d corresponden al modo TI Legacy Long Range. En la Figura 13c se muestra de la misma forma el porcentaje de paquetes recibidos de un total de 1800 paquetes enviados en cada una de las tres diferentes distancias, a 90 m el concentrador recibió 99 % de los paquetes y un 96 % de paquetes fueron recibidos en simulación, a 135 m cae a 98 % y 92 %, respectivamente, y por ultimo a 200 m un 77 % y 71 % fue la distancia con peor recepción. Para esta configuración los datos arrojados por los nodos y las simulaciones discrepan un 5 % (95 % de coincidencia). Por último, en la Figura 13d se muestra como el nivel del RSSI medido disminuye en intensidad conforme la distancia es mayor, con un promedio de 7 dBm de diferencia.
Si bien, estas pruebas y simulaciones de comunicación entre nodos son simples, nos permiten observar que la eficiencia de las redes y el nivel de intensidad de energía en la señal durante la recepción de los paquetes para las dos configuraciones se comportan dentro de lo esperado al variar la distancia entre nodos, tanto los datos obtenidos por los nodos como los simulados muestran que la eficiencia de la red decae conforme se incremente la distancia, al igual que el nivel de RSSI promedio detectado, el cual es más débil conforme la distancia es mayor. Que haya un comportamiento con alta similitud entre los datos obtenidos de las RIS y los simulados, con una discrepancia de entre 5 % y 8 % nos dan certeza sobre el uso futuro de la cama de simulación 3D para el diseño de redes más complejas.
Conclusiones
Las herramientas de simulación para RIS se utilizan cada vez más para estudiar y poner a prueba cualquier tipo de aplicaciones y protocolos dentro de un campo de investigación en constante crecimiento y evolución. La cama de simulación 3D presentada durante este escrito, permite adentrarse en el uso de una gran cantidad de herramientas de simulación proporcionados por el ecosistema OMNeT++, en donde el principal aporte de este trabajo es la obtención de un entorno 3D, que funciona como una herramienta analítica de simulación para el diseño de cualquier tipo de red, alámbrica o inalámbrica, con características propias del entorno urbano de la región.
Cuando se realiza cualquier tipo de simulación, siempre existe una preocupación primordial de que los resultados puedan no reflejar un comportamiento preciso; bajo esta premisa se presentaron los dos casos antes mencionados permitiendo obtener conclusiones alentadoras en sus comparativas. La eficiencia de las redes expresada en paquetes recibidos encontró una coincidencia promedio entre datos recolectados y simulados de 92 % para el estándar IEEE 802.15.4 y un 95 % para TI Legacy Long Range, además de un comportamiento esperado para los niveles de RSSI al variar la distancia entre nodos, como se observó en la sección anterior.
Se lograron realizar simulaciones en la cama de simulación 3D enfocando esfuerzos en representar lo más fiel posible los parámetros de radiofrecuencia de los nodos, con ubicaciones exactas en tres ejes, y tomando en cuenta factores que pueden afectar el alcance de la señal y la calidad de la comunicación, como el tipo y características de las antenas utilizadas, el ruido ambiental, atenuación de la señal y objetos físicos del ambiente urbano. Si bien las pruebas fueron simples y con pocos nodos, INET Framework y la cama de simulación 3D permiten escalar en complejidad y adentrarse en aspectos más a detalle en el simulado de redes, si es requerido, dependiendo de la aplicación o caso de estudio a realizar. El modelado de consumo energético, el uso de diversos protocolos MAC y protocolos de enrutamiento, animaciones y tipos de visualización, son algunas de las capacidades con las que cuenta la cama de simulación 3D. Por otra parte, el reciente lanzamiento de Simu5G amplía el panorama de posibilidades en la simulación de tecnologías novedosas referentes al 5G, donde su principal valor práctico radica en su capacidad de integrar en simulaciones cualquier modelo y librería para OMNeT++, y haciendo extensivos el uso de modelos desde INET Framework como enrutadores y nodos. Esto permite adentrarse a simulaciones bajo diferentes contextos, donde se busque la interconectividad inteligente y permanente entre dispositivos en la ciudad. El uso del mapeado de la cama de simulación 3D con simu5G, el uso de los modelos de movilidad de INET framework e interfaces externas con aplicaciones como Phyton, permite simular nuevos servicios de tecnologías de información y comunicación, como ciudades inteligentes, vehículos autónomos, realidad aumentada e industria 4.0, facilitando en este último simulaciones sobre distribución y transporte durante procesos de fabricación.
Los resultados invitan a tener confianza en el uso de la cama de simulación 3D para futuras simulaciones, sin embargo, se deben tener en cuenta las limitantes de su estado actual. El área que toma en cuenta objetos físicos como edificaciones y vegetación durante las simulaciones está limitada a 1 km2, lo que debe considerarse si se requieren simulaciones a mayor escala. Además, los datos de elevación de la cama de simulación 3D es una representación de la topografía de la región que no tiene efectos en simulación. Estos aspectos quedan abiertos como oportunidades de mejora para trabajos futuros que busquen implementar características adicionales de lo mostrado aquí.
Este trabajo sienta la base en el desarrollo de un proyecto extensivo que no solo se beneficia de la naturaleza modular de OMNeT++ que permita generar una cama de simulación 3D más robusta en el futuro, si no también y lo más importante, que aporte valor y certidumbre a los esfuerzos de generar sistemas con base en redes inalámbricas de sensores que permitan de forma eficaz y viable el monitoreo ambiental en la ciudad de Torreón y la Comarca Lagunera.

