











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
La enfermedad por coronavirus 2019 (COVID-19) causada por el virus del síndrome respiratorio agudo severo Tipo-2 (SARS-CoV-2), fue declarada pandemia mundial el 11 de marzo de 2020 por la Organización Mundial de la salud (Adhanom, 2020). Sin embargo, los primeros indicios de dicha enfermedad se presentaron en diciembre de 2019 en la ciudad de Wuhan, provincia de Hubei, República Popular China. Durante los meses de enero y febrero de 2020, el brote infeccioso se propagó rápidamente a otros países asiáticos y a otros continentes (Wu & McGoogan, 2020; Khan et al., 2020; Guo et al., 2020).
En México, el primer caso de COVID-19 se presentó el 27 de febrero de 2020 en la Ciudad de México, y para el 30 de abril del mismo año, el número de contagios alcanzó la cifra de 19,224 casos confirmados y de 1,859 (9.67 %) decesos (Academia Nacional de Medicina, 2020; Instituto Mexicano del Seguro Social, 2020; Secretaria de Salud de México, 2020; Suárez et al., 2020).
Debido al incremento exponencial de contagios en toda la república mexicana, el 14 de marzo de 2020, el secretario de educación pública a través de un comunicado oficial, adelantó y amplió el periodo vacacional de semana santa, es decir de 2 semanas a un mes (del 23 de marzo hasta el 17 de abril), como una medida preventiva para frenar el número de contagios en el país (Secretaria de Gobernación de México, 2020). A partir del 23 de marzo de 2020 hasta la fecha, todos los recintos educativos del país desde preescolar hasta universitarios se encuentran cerrados. Sin embargo, la impartición de clases en modalidad remota sigue vigente.
Esta pandemia ha modificado la forma tradicional de impartir clases a nivel mundial, al grado que los centros educativos, sus plantillas docentes y estudiantes han sido obligados a cambiar su modo conservador de dictar y recibir clases, respectivamente. Este cambio se ha logrado en muchos casos con la ayuda de las tecnologías de la información y Comunicación (TIC) existentes hoy en día. Además, las TIC han generado aspectos positivos entre los estudiantes respecto a la toma de clases; como incremento en el interés y motivación, mayor cooperación y han promovido un rol más activo entre ellos, debido a que han creado un espacio digital común, y facilitado la comunicación entre los mismos.
Sin embargo, muchas TIC se han enfocado únicamente en solucionar problemas de comunicación, desarrollando aplicaciones de videoconferencias, salones virtuales, sistemas de videollamadas, entre otros; beneficiando directamente a los cursos teóricos. Pero poco se ha desarrollado para ayudar a los cursos teóricos-prácticos, o disciplinas técnicas y científicas, en dónde un alto porcentaje (casi 60 %) del contenido didáctico y actividades están enfocadas a tareas prácticas y de medición.
Una tecnología auxiliar para reducir esta dificultad es un laboratorio remoto (Dormido, 2002). Esta tecnología no es de reciente creación, ya que durante las últimas décadas varias instituciones de educación superior han hecho diferentes esfuerzos para que esta tecnología se consolide en la enseñanza educativa. La Unión Europea ha financiado numerosos proyectos para impulsar el desarrollo de esta tecnología e investigar su impacto en la educación. Por ejemplo, el proyecto CYBERLAB, el cual generó un proveedor de servicios para la integración de laboratorios en red (CYBERLAB, 2005). El proyecto PEARL se enfocó en el desarrollo de infraestructura para el acceso remoto a los equipos de un laboratorio e investigó su impacto pedagógico para validar su desarrollo (Cooper et al., 2002; Cooper, 2005). El proyecto MARVEL desarrolló un entorno mixto que combina laboratorios remotos y virtuales (Müller & Ferreira, 2005). En el área de control automático se tienen los proyectos de Aburdene et al. (1991), en donde se planteó un esquema básico de acceso remoto a los equipos de un laboratorio y la posibilidad de compartirlos con otras universidades. El trabajo de Aktan et al. (1996), se enfocó en la enseñanza de control automático a través de Internet, y desde su realización, se hicieron varias implementaciones reales. Dentro de estas realizaciones, destacaron los laboratorios de sistemas dinámicos del Instituto Tecnológico de Stevens (Nickerson et al., 2007) y el de control de la Universidad de Siena (Casini et al., 2003; 2004). Estos laboratorios permitieron realizar experimentos sobre maquetas en donde se controló la temperatura, nivel de líquidos y algunos servomotores.
La literatura reporta varios trabajos referentes a soluciones tecnológicas para el diseño de aplicaciones de software y la gestión de laboratorios remotos como el de Esche (2006); Candelas & Sánchez (2010); Bernstein, & Ashrafioun (2004) y Dormido (2002), entre otros. En la página Web del Comité Español de Automática (CEA-IFAC) se tienen varios laboratorios virtuales y remotos relacionados con el área de ingeniería de sistemas, robótica, visión por computadora, y automatización o control automático. En el documento de Zamora (2012) se presenta una semblanza de los laboratorios remotos, su actualidad y tendencias futuras.
En el departamento de ingeniería de control y robótica de la división de ingeniería eléctrica de la Universidad Nacional Autónoma de México (UNAM) se tiene un proyecto de laboratorio remoto enfocado a la realización de prácticas de control y automatización. Estas prácticas están divididas en dos aspectos; el primero se enfoca en realizar la actividad en forma virtual a través del uso de simulaciones con software especializado y el segundo es a través del uso de estaciones de trabajo en donde previamente se monta el sistema o circuito a utilizar (División de ingeniería Eléctrica, 2015).
La empresa Tektronix cuenta con una aplicación llamada e*Scope Web-based Remote Control que permite el control remoto de un osciloscopio Tektronix perteneciente a la familia TDS3000 vía internet (Tektronix Inc, 2006). Esta aplicación presenta dos versiones; la básica y la avanzada. La básica se aloja en el osciloscopio y permite enviar comandos textuales de control y de consulta al osciloscopio. La versión avanzada se instala en una computadora personal y presenta una interfaz gráfica de usuario que permite establecer una operación remota del osciloscopio. Esta aplicación es útil para un acercamiento inicial con el control y adquisición de datos de forma remota.
En este documento se presenta el diseño y desarrollo de un subsistema de control, adquisición y almacenamiento de datos llamado SCAADOS, que tiene como tarea principal controlar y operar un osciloscopio Tektronix, modelo TDS3054B de forma remota utilizando el protocolo de comunicación de internet TPC/IP. Este subsistema presenta una arquitectura cliente-servidor y está integrado por un software de control, y adquisición de datos para un osciloscopio vía Internet llamado SCAOSIT. El software está basado en el principio de máquinas de estados finitos de Mealy e implementado en la plataforma y entorno de desarrollo de programación visual gráfico Labview 2020.
SCAADOS corresponde a la primera etapa de desarrollo de un laboratorio remoto, el cual estará conformado por un conjunto de subsistemas que permitirán la utilización remota de los equipos e instrumentos de propósito básico (osciloscopios, multímetros, etcétera), utilizados en cursos de instrumentación electrónica, y de propósito específico (medidor de interferencia electromagnéticas, analizador de redes, medidor de campo, etcétera), utilizados en ensayos de compatibilidad electromagnética, con los que cuenta el taller cámara semianecoica de la Facultad de Ciencias de la UNAM.
Este trabajo está divido en cuatro partes: La primera presenta la arquitectura en la que se basa el funcionamiento del subsistema SCAADOS. La segunda muestra el principio de funcionamiento del software SCAOSIT y una descripción de las partes que lo componen, la tercera presenta los resultados de las pruebas técnicas a las que fue sometido el subsistema para determinar su funcionamiento adecuado, y una comparación técnica entre SCAADOS y la aplicación e*Scope de Tektronix. Finalmente, la cuarta presenta una comparación entre las figuras de mérito de los sistemas SCAADOS y SCADA.
Desarrollo
Arquitectura del subsistema SCAADOS
El diseño de SCAADOS presenta una arquitectura cliente-servidor. En donde los clientes realizan un conjunto de peticiones especificas al servidor, y este las gestiona brindando recursos lógicos y físicos al cliente. Esta arquitectura de comunicación se logra a través de una red local, LAN (Local Area Networks), o una red amplia, WAN (Wide Area Network). En SCAADOS; los clientes son los estudiantes o investigadores que a través de una computadora y con el software SCAOSIT generan las peticiones al servidor. Es decir, los clientes pueden controlar y operar un osciloscopio Tektronix de forma remota a través del software. Este software se encarga de enviar las solicitudes al servidor y de recibir su respuesta, por lo tanto, también administra la lógica de la aplicación y validación de forma local.
En contra parte, el servidor que es el osciloscopio, recibe, gestiona, ejecuta las peticiones, y regresa información relacionada a dichas peticiones. En este documento se usará la palabra osciloscopio o servidor para referirse al mismo equipo. La Figura 1 muestra el diagrama de la arquitectura cliente-servidor utilizado por el subsistema SCAADOS.

Para establecer la comunicación cliente-servidor con el subsistema SCAADOS; el cliente debe tener instalado el software SCAOSIT en un equipo de cómputo, y contar con una dirección IP asignada al osciloscopio (servidor).
Cuando el servidor DHCP/BOOTP recibe la petición del osciloscopio, en donde se solicita una configuración de red, el DHCP responde al instrumento asignándole una dirección IP dinámica, mascara de subred, puerta de enlace y nombre de dominio (Domain Name System, DNS) por un periodo definido.
La dirección IP es el identificador único de red para el osciloscopio, que permite que los clientes puedan conectarse a él usando el protocolo TCP/IP. Pero si la dirección es dinámica se pueden presentar problemas de comunicación debido a su aleatoriedad. Estos problemas se solucionan asignando una dirección estática; la cual permite que la IP sea una dirección reservada para la tarea de comunicación osciloscopio-PC. De esta manera, la comunicación servidor-cliente se facilita. No obstante, este tipo de direcciones pueden representar un costo económico mayor.
Con una IP estática, cada cliente puede acceder al osciloscopio bajo una configuración de rol de contactos (perfiles de usuarios), la cual se encarga de controlar el acceso y especificar las tareas de lectura y escritura de forma independiente. En el rol se incluyen los atributos, y jerarquías de cada cliente para compartir el instrumento.
Sin embargo, el sistema SCAADOS presenta un problema de comunicación mayor, el cual hace referencia a las limitaciones del osciloscopio, es decir, el instrumento no presenta una comunicación de servidor multicliente. Por lo tanto, se deben analizar diferentes alternativas que permitan utilizar al osciloscopio como multicliente. No se profundiza en el análisis de este problema porque está fuera del alcance de este artículo.
Características del servidor
El osciloscopio cuenta con cuatro canales de adquisición. Cada canal tiene una impedancia de entrada de 1 Mohms, una capacitancia de 13 pFarads y un voltaje de entrada máximo de 150 Vrms, con una sensibilidad vertical (/div) que va desde 1 mV hasta 10 V. En la parte de comunicación; cuenta con un puerto Ethernet, el cual se utiliza para implementar el subsistema de SCAADOS. La Tabla 1 presenta las características eléctricas y de comunicación del servidor.
Tabla 1 Características del osciloscopio Tektronix modelo TDS3054B
| Descripción | Especificación |
|---|---|
| Número de canales | 4 |
| Ancho de banda | 600 MHz |
| Tasa máxima de muestreo por canal | 5 GS/s |
| Cantidad de puntos adquiridos en modo normal | 10 000 |
| Sensibilidad vertical (/div) | 1 mV a 10 V |
| Adquisición por disparo (Trigger) rápido | Hasta 3600 señales por segundo |
| Software de control remoto | E*Scope Web-based remote Control |
| Puertos de Comunicación | Un RS-232, un GPIB, un VGA, y un Ethernet |
Software SCAOSIT
El software SCAOSIT está basado en el principio de máquinas de estados finitos de Mealy (MEFM), que permite determinar el comportamiento del sistema, con base al estado que presenta y las entradas instantáneas que recibe en un momento específico. Con este principio se define un conjunto de estados que guarda el sistema en cada instante como conexión TCP/IP, configurar medición, adquirir datos, entre otros, que sirven de intermediarios en la relación de entradas y salidas al sistema, como cambio de escala de voltaje, periodo, interrupción de comunicación del sistema, cambios en la señal a medir y mensajes del estado que guarda el subsistema. Esto permite que el historial de parámetros de entradas determine un estado para la máquina, de forma que la salida dependa únicamente del estado y las entradas recibidas en un momento determinado.
La transición de un estado a otro se genera en respuesta a eventos de entradas externas como cambio de escala de voltaje o periodo, e internos como errores en la comunicación cliente-servidor; a su vez, estas transiciones pueden generar otros eventos de salida. En la Figura 2 se presenta el diagrama de máquinas de estados de Mealy en la que está basado el software SCAOSIT.

Para desarrollar el software SCAOSIT se utilizó el lenguaje de programación gráfico LabView porque presenta una programación orientada a diagramas de bloques y tiene la capacidad de ejecutar procedimientos en paralelo, manejar aplicaciones en tiempo real, y trabajar con equipo de cómputo como servidor Web (National Instruments, 2020). Además, se utilizaron los controladores del osciloscopio desarrollados por Tektronix/National Instruments, los cuales ayudan a configurar, controlar, recuperar datos y gestionar la comunicación con los instrumentos a través de diferentes protocolos de comunicación como TCP/IP, GPIB, serie, entre otros. Los controladores están desarrollados en la API de arquitectura de software de instrumentos virtuales NI-VISA de LabView, la cual presenta varias ventajas en la gestión de comunicación con los instrumentos, como independencia de interfaz, portabilidad de la plataforma, y facilidad de uso.
Interfaces del software SCAOSIT
El software está formado por tres interfaces gráficas de usuario (graphical user interface, GUI), una de comunicación y dos de control y adquisición de datos llamadas “communication”, “just one channel” y “all channel”, respectivamente.
Interfaz “communication”
La interfaz “communication” se encarga de establecer la comunicación cliente-servidor a través de una conexión de Internet, usando el protocolo TCP/IP. Esta interfaz está dividida en cuatro bloques. En el primer bloque llamado “VISA Resource Name” se introduce la dirección TCP/IP asignada al servidor y tiene un botón tipo led denominado “connect” para indicar el estado de la comunicación. Este botón cambia de color de acuerdo con el estado de la comunicación; es de color verde, si hay comunicación, y de color rojo si no hay. El segundo bloque llamado “Device” permite habilitar o deshabilitar el servidor a necesidad del usuario. El tercer bloque es una ventana de mensajes denominada “Connection status”, en donde se presentan códigos y mensajes relacionados al estado de la comunicación cliente-servidor. Finalmente, el cuarto bloque es una ventana de mensajes llamada “Process status”, en donde se muestran códigos y mensajes relacionados con la gestión de las transiciones entre los estados del software. La Figura 3 muestra la interfaz “communication”.

Figura 3 Interfaz “communication”, a) VISA Resource Name, b) device, c) connection status y d) process status
En la Figura 4 se presenta el proceso de comunicación que realiza el sistema SCAADOS. Este proceso está dividido en dos partes; la primera está representada por el proceso que realiza el servidor DHCP al asignar una dirección IP dinámica al osciloscopio, y la segunda corresponde al proceso de comunicación servidor-cliente que realiza el software SCAOSIT a través de la interfaz “communication”.

La interfaz “communication” está conformada principalmente por el controlador VISA denominado “TeKTDS3k Initialize”, el cual es el núcleo en el proceso de comunicación. Este controlador ejecuta cinco tareas específicas que se repiten de forma continua para establecer un canal de comunicación y transmisión de datos entre el Osciloscopio y PC (cliente-servidor) de forma fluida, y utilizando el protocolo TCP/IP. Estas tareas son abrir una sesión a un recurso VISA, configurar la comunicación en el recurso dato (velocidad de transferencia, carácter de terminación, etcétera), realizar escrituras y lecturas al instrumento, cerrar la sesión al recurso y manejar cualquier error que pueda haber ocurrido.
El proceso de comunicación comienza cuando se introduce la IP en la celda VISA Resource name de la interfaz “communication”. El software toma esta IP y la asigna al control VISA Resource que forma parte del controlador. El control Resource especifica el tipo de interfaz y la dirección del instrumento, y el tipo de sesión VISA para comunicarse con el osciloscopio. La sesión VISA es el identificador lógico único para comunicarse con el instrumento. La sintaxis que presenta el control VISA es TCPIP::dirección host::INSTR. Esta operación se realiza cada vez que se desea comunicar con el osciloscopio utilizando la función viOpen(), la cual abre un canal de comunicación que corresponde a la denominada sesión. Esta se mantiene por el control de nombre del recurso VISA.
Todo el código de programación correspondiente al proceso de comunicación está dentro un bucle “while”, el cual permite que se repita de forma automática hasta establecer la comunicación. Dentro de este bucle se introduce un retardo de 50 ms para evitar que el procesador de la computadora se sature, y pueda atender otras tareas, si así se requiere.
Interfaces “just one channel” y “all channels”
Las interfaces “just one channel” y “all channels” se encargan de las tareas de control, operación y adquisición de datos del osciloscopio de forma remota. Estas interfaces permiten operar al osciloscopio, enviando comandos de configuración como escala de voltaje, periodo, selección y habilitación del canal o canales de medición, entre otras. La Figura 5 muestra las interfaces de control y adquisición del software SCAOSIT.
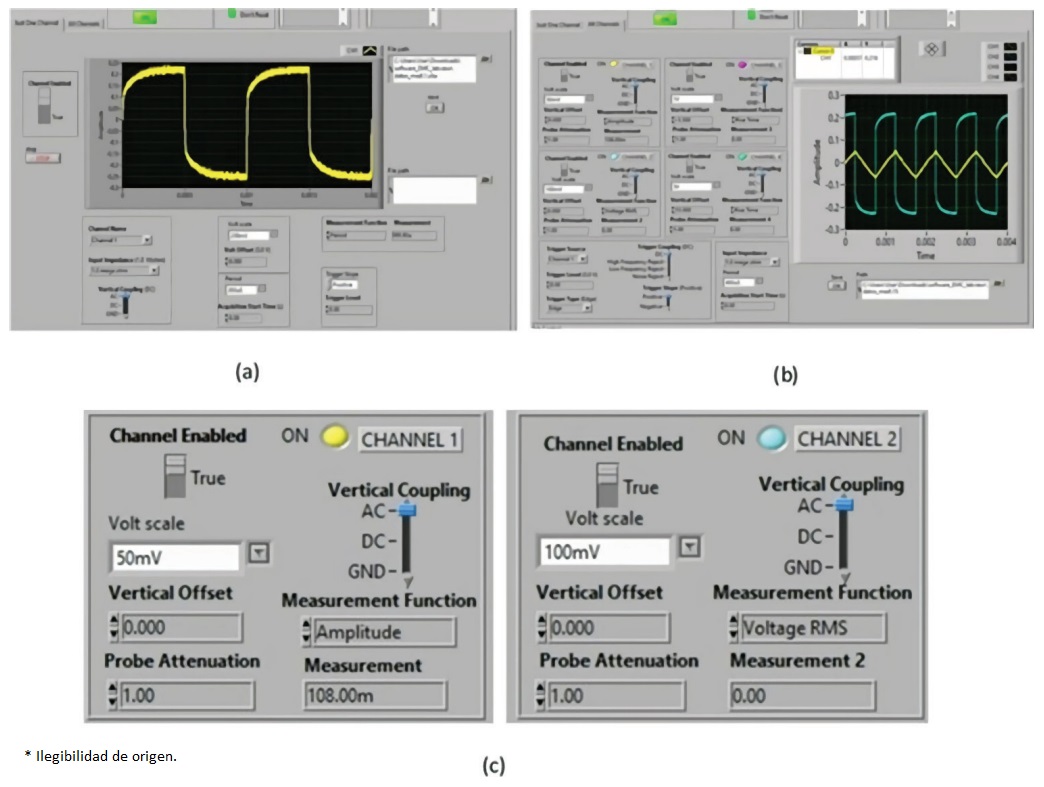
Figura 5 Interfaces del software SCAOSIT, a) “just one channel”, b) “all channels” y c) controles de los canales 1 y 2 de la interfaz “all channels”
La Figura 5a presenta la interfaz “just one channel” que está formada por botones de control como “Channel Enable”, “Channel Name”, “Vertical coupling”, etcétera. Estos botones se encargan de habilitar o deshabilitar un canal seleccionado y de establecer el acoplamiento vertical para el proceso de medición, respectivamente. También cuenta con botones de selección de escala de voltaje y de periodo. El botón de escala de voltaje cuenta con 12 valores de escalas preestablecidos (1 mV, 2 mV, 5 mV, …), y el de periodo con 20 valores (2 ns, 4 ns, 10 ns, 20 ns, …), que corresponden a los mismos valores que presenta el osciloscopio de forma física en su panel de control. Además, cuenta con los botones relacionados a la función de disparo (trigger), como selección de canal, nivel de disparo, y selección de pendiente positiva o negativa.
De igual forma presenta controles de selección y ventanas de visualización para desplegar la magnitud de un parámetro eléctrico de una señal medida por el osciloscopio como es el valor pico (Vp), valor cuadrático medio (Vrms), valor promedio (Vavg), etcétera. Asimismo, cuenta con una gráfica en donde se traza en tiempo real la forma de onda de la señal medida. En esta interfaz solo se puede utilizar un canal de medición del osciloscopio a la vez, pero permite seleccionar cualquiera de los cuatro canales disponibles del osciloscopio en tiempos diferentes.
La interfaz “all channels” presenta los mismos controles de selección y de visualización que presenta la interfaz “just one channel” pero multiplicados por cuatro, debido a que esta interfaz tiene la capacidad de utilizar los cuatro canales de medición del osciloscopio y adquirir cuatro señales diferentes al mismo tiempo con parámetros y escalas de medición independientes. La Figura 5b presenta la imagen de la interfaz durante la medición de dos señales distintas con diferentes parámetros de medición. Para este proceso se utilizaron los canales 1 y 2. Con el canal 1 se midió una señal triangular, y con el canal 2 se midió una señal cuadrada. En la Figura 5c se presentan los controles correspondientes a los canales de medición 1 y 2 de la interfaz. En esta figura se observa que el canal 1 utilizó una escala de medición de 50 mV, y midió el parámetro denominado “Amplitude”, el cual presenta un valor de 108.00 mV. El canal 2 utilizó una escala de medición de 100 mV y midió el parámetro denominado “Voltage RMS” con un valor de 0 V. Este valor se debe al hecho de que el sistema se actualizó en el momento de la captura de la imagen, lo cual demuestra que el software trabaja en tiempo real.
En ambos canales se seleccionó el acoplamiento “AC” por tratarse de señales alternas o variantes en el tiempo. Los canales 3 y 4 de la interfaz presentan la misma independencia de operación, adquisición y medición.
Los botones de uso común solo se presentan una sola vez, como es el botón de selección de periodo. Este está controlado por el canal asignado a la función de disparo del osciloscopio (trigger), en este caso, canal 1. Por tal motivo, ambas señales de la Figura 5b presentan la misma escala de periodo. Esto es una limitante propia del osciloscopio. El software solo controla el hardware del instrumento. La interfaz “all channels” presenta una sola gráfica, en donde se trazan las señales adquiridas por cada canal con un color diferente y su respectiva leyenda de identificación de canal. Para más detalles del proceso de medición de dichas señales ver la sección de prueba de control y operación de este documento.
Almacenamiento de datos adquiridos
Las interfaces de operación tienen la opción de almacenar los datos correspondientes a las señales medidas. Las interfaces presentan campos para introducir una ruta de almacenamiento definida por el usuario y un botón etiquetado como “save”.
Cuando se da clic en el botón “save”, el software crea un archivo tipo texto (.txt) en la ruta definida por el usuario, y a su vez, envía la colección de datos a una hoja de cálculo de Excel (.xlsv), la cual se despliega sistemáticamente, pero no se guarda automáticamente. La Figura 6 presenta los cuadros de acceso de ruta y los botones para generar los archivos de datos de cada una de las interfaces.

Figura 6 Campos para introducir una ruta de dirección (File path) y botón “Save” para almacenar archivos a través de las interfaces, a) “just one channel”, b) “all channels”
El formato de los archivos de texto y de la hoja de Excel es el siguiente; por cada canal utilizado del osciloscopio, se generan dos columnas de datos. Una que corresponde al periodo y otra a la magnitud. Cada columna contiene 10,000 datos.
Para la interfaz “just one channel”, los archivos están conformados por dos columnas únicamente porque solo se permite utilizar un canal del osciloscopio a la vez. Para el caso de la interfaz “All channels”, los archivos están formados por ocho columnas porque se pueden utilizar los cuatros canales a la vez; dos columnas por cada canal. La Figura 7 presenta los formatos de los archivos Excel generados por las interfaces “just one channel” y “all channels”.

Cuando se generan los archivos de datos, también se genera un archivo con formato de mapa de bits (Windows bitmap, .BMP) de la señal adquirida y se almacena en la misma dirección definida por el usuario. La Figura 8a presenta la imagen de la señal adquirida por la interfaz “just one channel” en formato .BMP que es una representación de la señal medida con el canal 1 del osciloscopio, que corresponde a la imagen de la Figura 8b.

Resultados y discusión
Para comprobar el funcionamiento adecuado del subsistema SCAADOS se utilizó una laptop en donde se instaló el software SCAOSIT y se conectó a Internet vía WIFI. El osciloscopio Tektronix se conectó a Ethernet a través de un cable 10BaseT recto con conector RJ-45. Como señal de prueba, se utilizó la señal que proporciona el propio osciloscopio para pruebas de compensación de sondas. Esta señal corresponde a un pulso cuadrado con un valor pico-pico de 5 volts y una frecuencia de 1KHz. También se utilizaron dos sondas marca Tektronix, con un factor de atenuación de 10. Por lo tanto, el valor pico-pico máximo reportado será de 500 mV. Una sonda se conectó al canal 1 y la otra al canal 2 ó 4 del osciloscopio, según sea el caso.
Prueba de comunicación cliente-servidor
La primera prueba técnica que se aplicó al subsistema SCAADOS fue la de establecer comunicación cliente-servidor. Para ello, el osciloscopio se conectó a una red de Ethernet antes de ser encendido, para obtener una dirección IP, asignada por el servidor DHCP/BOOTP de forma automática durante el proceso de inicialización. Cuando este proceso concluye, el osciloscopio despliega en su pantalla un mensaje con la dirección asignada. Esa dirección se introdujo al campo VISA Resource en la interfaz “communication” del software SCAOSIT y se dio clic en la tecla ENTER. A partir de ese momento, el software tomó el control para establecer comunicación cliente-servidor. En caso de que el osciloscopio no obtenga de forma automática la dirección, esta se puede obtener a través del botón denominado Utilidades, situado en el panel frontal del instrumento. La Figura 9 presenta el mensaje que despliega el osciloscopio y el campo de acceso para la dirección IP en la interfaz.

Figura 9 Dirección IP asignada por el servidor DHCP, a) mensaje mostrado en la pantalla del osciloscopio, b) campo de acceso para la dirección IP en la interfaz “communication”
Cuando la comunicación cliente-servidor se estableció, el botón “connect” cambió de color rojo a color verde, y en los mensajes de estado “Connection” y “Process” se presentaron los iconos de verificación positiva en color verde. En caso contrario, el botón “connect” cambió a color rojo, y se presentaron los iconos de verificación negativa en color rojo con un mensaje de texto con el código y problema detectado. La Figura 10 presenta los cuadros de mensajes de comunicación exitosa que genera el software SCAOSIT.

Figura 10 Mensajes de comunicación cliente-servidor exitosa del software SCAOSIT, a) de conexión y b) de proceso
Una vez que la comunicación fue establecida; el software envió un conjunto de parámetros de configuración inicial al osciloscopio de forma automática. Estos parámetros fueron escala de voltaje de 5 volts, periodo de 200 microsegundos y habilitación del canal 1. En cuestión de segundos el osciloscopio recibió los parámetros y los desplegó en su pantalla. A un costado del parámetro escala de voltaje que recibió el osciloscopio se presentó el símbolo de una señal sinusoidal como confirmación de que está operando en forma remota. En respuesta, el osciloscopio envió información al software relacionada a la comunicación y comenzó a enviar datos de la señal medida. La cual se trazó en la gráfica de la interfaz “Just one channel”. En la Figura 11 se muestran las imágenes de la señal de prueba capturada por el osciloscopio y por SCAADOS.

Si los parámetros iniciales que envía el software corresponden con la señal medida, esta se traza en el osciloscopio y en la interfaz del software automáticamente. En caso contrario, se muestra un mensaje de error de proceso, en donde se indica que los parámetros de medición no corresponden con los parámetros de la señal.
Prueba de control y operación
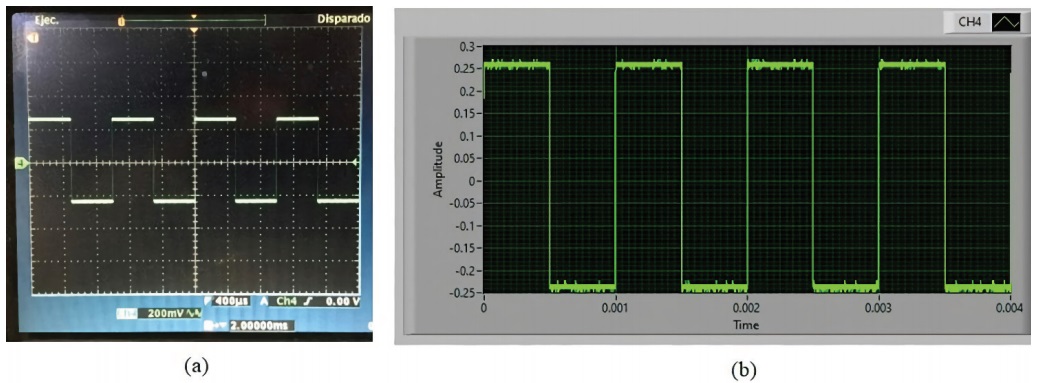
La segunda prueba técnica que se aplicó al subsistema SCAADOS correspondió a medir un pulso cuadrado de forma remota utilizando los canales 1 y 4 del osciloscopio. En dónde también se probó la parte de control y operación del subsistema. Para conseguir tal objetivo, a través del software se enviaron al osciloscopio diferentes parámetros de configuración como escalas de voltaje, de periodo, etcétera. El osciloscopio recibió y ejecutó dichos parámetros adecuadamente. La Figura 11 muestra la señal cuadrada adquirida por el osciloscopio y por el subsistema SCAADOS, a través del canal 1. Esta señal presenta un valor pico-pico de 480 mV y una frecuencia de 1 KHz.
En la Figura 12 se muestra la misma señal medida que en el caso anterior, pero utilizando el canal 4 del osciloscopio. La señal adquirida con el canal 1 muestra una diferencia en el tiempo de subida respecto a la señal medida con el canal 4. Esto se debe a que el canal 1 presenta una degradación en su electrónica interna. Sin embargo, los valores de pico-pico y de frecuencia obtenidos con el osciloscopio y con SCAADOS corresponden a los valores esperados. Estos resultados vislumbran un correcto funcionamiento del subsistema en la parte de comunicación, control y operación del osciloscopio.
Prueba de comprobación de las lecturas realizadas con SCAADOS
La tercera prueba correspondió a comprobar las lecturas realizadas con el subsistema. Esta comprobación se basó en una comparación numérica entre los datos medidos por el osciloscopio y por SCAADOS. En ambos casos se utilizó el canal 1.
En la Tabla 2 se presenta la comparación entre las lecturas realizadas con el osciloscopio y con el subsistema. Para realizar esta prueba se utilizó la herramienta cursor del osciloscopio y del software. Esta herramienta permite obtener una lectura relativa de la amplitud o del periodo de una señal. Se utilizó un cursor vertical u horizontal como referencia, colocándolo sobre el eje “x” ó “y” en su valor de cero, según sea el caso, y el otro cursor se desplazó a lo largo del eje “x” o “y” para obtener el periodo o amplitud, respectivamente.
Tabla 2 Comparación entre los datos adquiridos con el osciloscopio y con el software SCAOSIT
| Osciloscopio TDS3054B | Software SCAOSIT | Error de las medidas | |||
|---|---|---|---|---|---|
| Voltaje (mV) |
Frecuencia (KHz) |
Voltaje (mV) |
Frecuencia (KHz) |
Voltaje (mV) |
Frecuencia (KHz) |
| -240 | 1 | -241 | 1.001 | 1 | 0.01 |
| -204 | 1.001 | -203 | 1.008 | -1 | -0.07 |
| -160 | 1 | -158 | 1.007 | -2 | -0.07 |
| -124 | 999.9 | -124 | 999.9 | 0 | 0 |
| -84 | 1 | -90 | 1 | 6 | 0 |
| -44 | 1 | -43 | 1 | -1 | 0 |
| 0 | 1.01 | 0 | 1.01 | 0 | 0 |
| 36 | 999.9 | 38 | 999.9 | -2 | 0 |
| 76 | 999.9 | 79 | 999.9 | -3 | 0 |
| 116 | 1.01 | 115 | 1.01 | -1 | 0 |
| 160 | 1.01 | 160 | 1.01 | 0 | 0 |
| 196 | 1 | 195 | 1 | 1 | 0 |
| 236 | 1.01 | 234 | 1.01 | 2 | 0 |
En la tabla se observan seis columnas, en donde las columnas 1 y 2 corresponden a las lecturas medidas por el osciloscopio. Las columnas 3 y 4 presentan las lecturas obtenidas por el software, y las columnas 5 y 6 atañen al error absoluto de las lecturas realizadas. Las columnas 1, 3, y 5 competen a los voltajes y las columnas 2, 4, y 6 corresponden a las frecuencias. El error absoluto de las lecturas de voltaje y de frecuencia se obtuvieron con la ecuación 1.
Donde lec osc es la lectura con el osciloscopio y lec soft corresponde a la lectura con el software. Como se observa en la Tabla 2, el error absoluto encontrado entre las lecturas medidas por el osciloscopio y por el software es relativamente pequeño. Para el voltaje, el error máximo es de 2 milivolts, y para la frecuencia es de algunas cuantas unidades de Hz. Esta diferencia se debe principalmente a un error de paralaje al usar la herramienta cursor en ambos casos. Con estos resultados se concluye que el software funciona adecuadamente en la función de medición. El parámetro de frecuencia que se reporta en la Tabla 2, se obtuvo midiendo el periodo de la señal eléctrica con el osciloscopio o software, y utilizando la ecuación 2.
Archivos de datos e imágenes
La última etapa de comprobación corresponde a la generación de los archivos tipo texto (.txt), de la hoja de cálculo (.xlsx) y de mapa de bits (BMP). Para esta comprobación se verificó la correcta generación de los archivos y de sus contenidos.
En la Figura 13 se observa que se generaron en la dirección definida por el usuario, cuatro archivos con los nombres “1´s” y “8´s”. Dos son tipo texto y dos son tipo .BMP. Los archivos con los nombres “1’s” se generaron con la interfaz “just one channel” y los archivos con los nombres “8’s” se generaron con la interfaz “all channels”. Asimismo, se verificó la generación del archivo tipo Excel llamado “1”. Cuando este archivo se genera, una hoja de cálculo se abre de forma automática desplegando todos los datos adquiridos.

Para verificar que los datos adquiridos y almacenados en los diferentes archivos eran correctos, se realizó una comparación analítica de los mismos, en donde el resultado obtenido mostró una alta correspondencia. También se realizó una comparación visual entre las gráficas generadas con los datos de los archivos respecto a la señal medida con el osciloscopio.
La Figura 14 presenta la comparación visual de las gráficas obtenidas con SCAADOS y con el osciloscopio. En las Figuras 14 a, b, c, d y e, se observan las gráficas generadas con los archivos tipo Excel, texto, interfaz “just one channel”, osciloscopio y .BMP de la señal adquirida, respectivamente. De la comparación visual y con la ayuda de la herramienta cursor del osciloscopio y de SCAOSIT se concluye que todas las señales generadas con los datos de los archivos presentan una alta correspondencia tanto con la señal medida con el osciloscopio como con las imágenes generadas con el software. Es decir, obteniendo una señal con un valor de 480 mV y con un periodo de 1000x10-6 S (1KHz), en todos los casos.
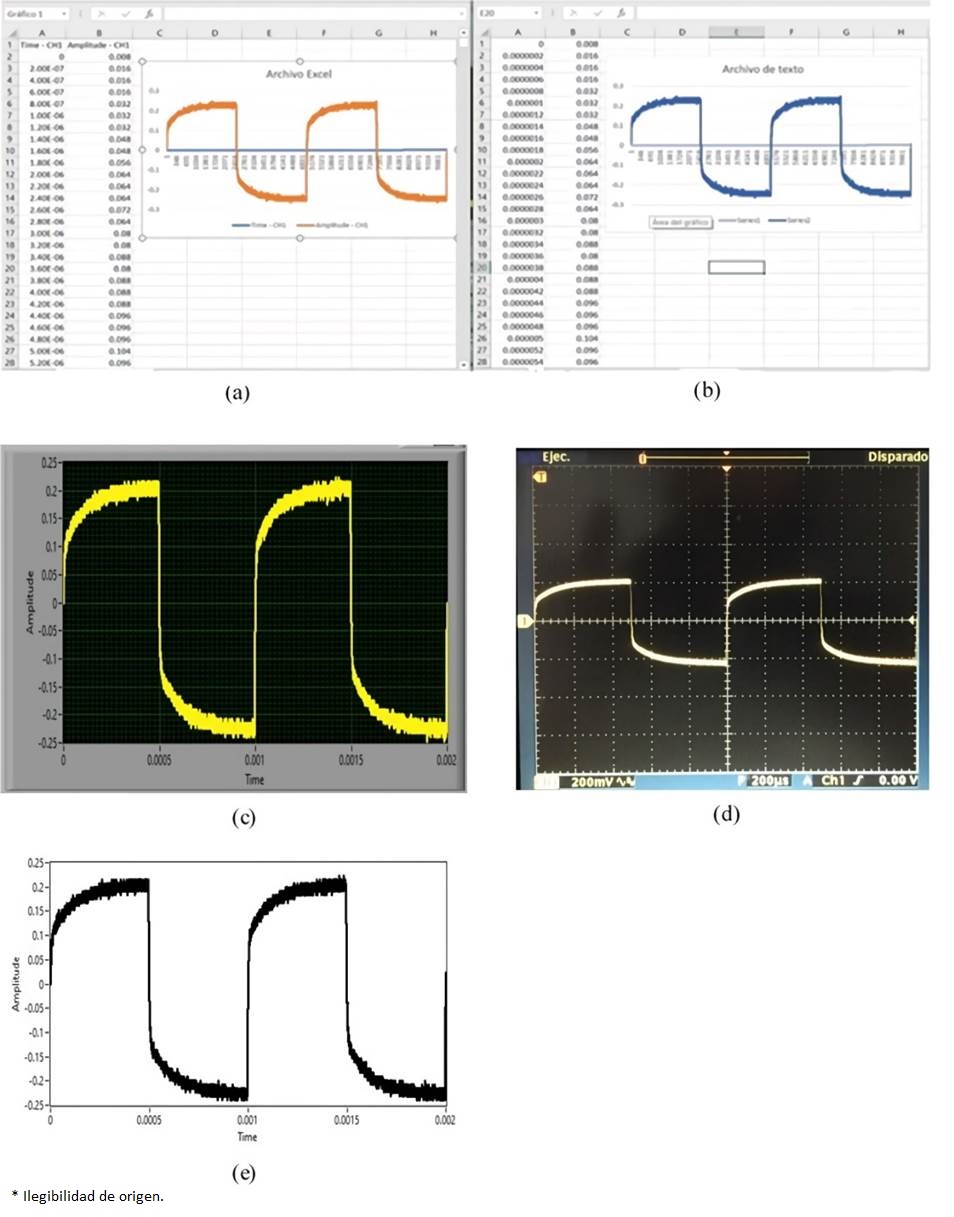
Figura 14 Comparación entre las gráficas generadas con los datos de los archivos y la señal medida con el osciloscopio, a) archivo Excel, b) archivo texto, c) gráfica capturada con la interfaz “just one channel”, d) gráfica del osciloscopio y e) imagen formato BMP
Las mismas pruebas de funcionalidad, generación y almacenamiento de datos se realizaron con la interfaz “all channels”, obteniendo un resultado satisfactorio. Para esta comprobación se utilizaron los canales 1 y 2 del osciloscopio, y dos señales diferentes; una que corresponde a la señal de calibración que genera el osciloscopio, y otra que corresponde a la señal de salida de un circuito serie RC, que fue alimentado con la señal de calibración. Este circuito está conformado por un resistor de 820 ohms y un capacitor de 100 nF, dando como resultado una señal triangular con un valor pio-pico de 1.32 V. Con el canal 1 se midió la señal triangular, y con el canal 2 se midió la señal de referencia.
El objetivo de utilizar dos señales diferentes fue el de comprobar la capacidad de la interfaz para controlar de forma independiente cada canal de medición utilizado. Debido que ambas señales presentan distintos valores pico-pico, se seleccionaron diferentes escalas de voltaje con ayuda de la interfaz. Para el canal 1 se seleccionó la escala de 50 mV y para el canal 2 de 100 mV. La selección de estas escalas considera la atenuación que presentan las puntas de osciloscopio. Esta interfaz también permite seleccionar de forma independiente otros parámetros de medición como “Measurement Fuction”, “Vertical Offset” “Probe Attenuation”, “Vertical Coupling”, etcétera.
La Figura 15 presenta la comparación visual de las gráficas generadas con los archivos y con las señales medidas con el osciloscopio. Las Figuras 15a y 15b muestran las gráficas de los pulsos cuadrados y triangulares que corresponden a los datos almacenados en los archivos tipo Excel y texto, respectivamente. En las Figuras 15c y 15d se presentan las señales de los pulsos y triangulares capturadas con la interfaz “all channels” y con el osciloscopio, respectivamente. Finalmente, en la Figura 15e se expone la imagen generada con formato tipo .BMP de las señales del pulso y triangular. De la comparación visual se concluye que todas las señales generadas con los datos de cada archivo presentan una alta correspondencia, es decir, obteniendo una señal triangular con un valor de 138 mV y una señal cuadrada con un valor de 480 mV, con un periodo de 1000x10-6 S, en todos los casos.

Figura 15 Comparación entre las gráficas generadas con los archivos y la señal medida con el osciloscopio, a) archivo Excel, b) archivo texto c) gráficas generadas con la interfaz “all channels”, d) gráfica del osciloscopio y e) archivo BMP
En la Figura 15d se observan en la base de la pantalla del osciloscopio los canales activados, las escalas de voltaje de cada canal, el periodo seleccionado y el canal que controla la función de disparo (de izquierda a derecha). De esta forma se comprueba la individualidad que tiene cada canal en el proceso de medición. Además, a un costado de la escala de voltaje se presentan dos iconos con forma de onda sinusoidal, estos iconos se activan cuando el osciloscopio es controlado de forma remota. En este caso, a través del software SCAOSIT. Esta prueba de funcionalidad también se realizó con los canales 3 y 4.
Comparación entre el software SCAADOS y e*Scope Web-based Remote Control
En la Tabla 3 se presenta una comparación técnica entre el subsistema SCAADOS y la aplicación e*Scope Web-based de Tektronix. Las características que se comparan entre las dos aplicaciones son tipo de arquitectura, escalabilidad, portabilidad, entre otras.
Tabla 3 Comparación de rendimiento entre SCAADOS y e*Scope Web controle
| E*Scope | SCAADOS | |
|---|---|---|
| Tipo de arquitectura | cerrada | abierta |
| Tipo de control | remoto | remoto |
| Vía de comunicación | Ethernet/ | Ethernet |
| Protocolo de conexión | TCP/IP | TCP/IP |
| Interfaz gráfica de usuario | Si. Difiere de la carátula del osciloscopio | Si. Similitud con la carátula del osciloscopio |
| Tipo de controles y/o botones que presenta la interfaz | No intuitivo | Intuitivo |
| Actualizaciones | No | Si |
| Visualización de señal adquirida | No, por la desactualización de la aplicación | Si Visualización en tiempo real |
| Escalable | No | Si |
| Portable | No | Si |
| Aplicación Personalizada | No, propósito general | Si, propósito específico |
| Permite acceder al menú del instrumento | Si | Si |
| Mide parámetros eléctricos específicos | Si | Si |
| Almacenamiento de datos | Si, en disco de 3 1/2” (obsoleto) | Si, genera tres archivos con diferente formato (.txt, .xlsx y. BMP) |
De acuerdo con la comparación, se concluye que ambas aplicaciones presentan varias similitudes técnicas, operativas, de control y de comunicación que permiten una operación remota del osciloscopio.
Sin embargo, la aplicación e*Scope presenta varias desventajas; es un desarrollo genérico, básico y con una arquitectura de software cerrada, lo cual genera una configuración y control elemental o poco eficiente del osciloscopio. No presenta actualizaciones para esta familia de instrumentos, dando como resultado un funcionamiento errático de la plataforma y del equipo. Por ejemplo, la imagen de la señal adquirida no se observa en la interfaz de la aplicación, lo cual complica la operación del osciloscopio de forma remota. Además, presenta un diseño de interfaz totalmente diferente al panel de control del osciloscopio. Así como también, utiliza el grabador de disquetes de 3 1/2” del osciloscopio como medio de almacenamiento de datos. Este medio de almacenamiento es obsoleto y hace que pierda sentido la operación remota.
En contra parte, SCAADOS presenta una arquitectura abierta, de propósito específico y actualizado, que permite obtener un rendimiento eficiente tanto del software como del instrumento. Además, presenta un diseño de interfaces con alta similitud al tablero de control del osciloscopio, lo que lo hace más amigable e intuitivo al usuario. Asimismo, genera tres tipos de archivos con diferente formato (.txt, .xlsx y. BMP) en la localidad del cliente. Esto permite que los archivos puedan ser utilizados en otras aplicaciones.
Otras características importantes que presenta SCAADOS son la escalabilidad y portabilidad. Es escalable porque puede interactuar con otros equipos de medición que formen parte de una cadena de instrumentación electrónica. También es portable porque puede trabajar con cualquier marca y modelo de osciloscopio que se tengan en un laboratorio. Evidentemente, realizando las adecuaciones pertinentes al subsistema, es decir, en el caso de portabilidad se deben desarrollar las interfaces que interactúen con los nuevos instrumentos de medición, y en el caso de la escalabilidad se deben de agregar los controladores, cambiar umbrales de medición, etcétera, que corresponden a aspectos propios de cada marca y modelo. Esta parte puede ser subsanada con el desarrollo de una base de datos que contenga los controladores y parámetros eléctricos de medición correspondientes a una gama de marcas y modelos de osciloscopios.
Comparación técnica entre los sistemas SCAADOS y SCADA
El sistema SCAADOS está basado en el concepto de laboratorio remoto, por lo tanto, es un sistema diferente e independiente al sistema SCADA (Supervisor control And Data Acquisition). Esto se debe a los principios y objetivos de funcionalidad. Es decir, el sistema SCAADOS está enfocado a auxiliar, y facilitar la investigación, docencia, formación y capacitación de recursos humanos de forma remota, sin perder la rigidez y precisión que estas áreas exigen. Además, es un sistema flexible desde el punto de vista tecnológico y estructural porque no está limitado a cumplir normas, ni estructuras jerárquicas industriales. Tampoco está limitado a utilizar tecnología específica para estudiar, solucionar, y resolver un fenómeno de interés.
Por otro lado, un sistema SCADA presenta un objetivo específico que es la automatización de los procesos de manufactura en la industria actual (Shaw, 2006, Rodríguez 2007, Pérez, 2015). Este objetivo hace que este tipo de sistema sea rígido en el uso de la tecnología y planteamiento de su estructura funcional, ya que debe cumplir con normas o estatutos de producción, etcétera, que el área industrial específica requiere. Es decir, presenta una estructura cerrada que depende exclusivamente del área de aplicación.
Sin embargo, ambos sistemas SCAADOS y SCADA presentan varias similitudes, las cuales están enfocadas al uso de la tecnología TIC como protocolos de comunicación, lenguajes de programación, uso de interfaces hombre-máquina etcétera, al grado que un sistema puede ser confundido con el otro. Pero en realidad, son sistemas totalmente diferentes.
En la Tabla 4 se presenta una comparación de características técnicas entre los sistemas SCAADOS y SCADA. De dicha comparación se desprenden las siguientes conclusiones; el sistema propuesto cumple con los objetivos de un laboratorio remoto, que son: ayudar a la investigación, docencia, y capacitación de recursos humanos de forma remota, a través de las tareas de medición, adquisición y graficación de señales eléctricas en tiempo real. A su vez, presenta una arquitectura abierta y no está limitada por un área específica de aplicación, ni por normas industriales como el sistema SCADA.
Tabla 4 Comparación técnica entre el sistema SCAADOS y un sistema SCADA
| SCAADOS | SCADA | |
|---|---|---|
| Objetivos principales del sistema | Facilitar la investigación, docencia y formación de recursos humanos | Automatizar procesos industriales |
| Tareas para desarrollar | Medir, analizar, controlar, operar, tomas de decisiones, capacitar, adquisición de datos de diferentes fenómenos de estudio | Supervisar, gestionar, controlar, operar, y toma de decisiones de un sistema específico de producción |
| Tipo de arquitectura | Abierta, es escalable, actualizable, etc. | Semiabierta, es escalable, actualizable, etc., pero está limitada por el proceso industrial a automatizar |
| Entorno de aplicación | Investigación, docencia, capacitación e industrial | Industrial |
| Estructura de control | Flexible | Rígido (definido por la filosofía de la empresa y los estándares de esta) |
| Requiere de un supervisor | No | Si |
| Requiere de equipo especializado (PC industrial, PLC, etc.) | No (puede utilizar la tecnología disponible) | Si |
| Requiere de una interfaz hombre-máquina (HMI) | Si | Si |
| Requiere de una computadora central o MTU (Master Terminal Unit) | No | Si |
| Software especializado que cumple funciones específicas | No (es adaptable) | Si |
| Utiliza modelos de integración tecnológica de uso industrial | No | Si |
| Configuración, y ejecución de acciones de control para la evolución del proceso | Si | Si |
| Adquisición, y almacenamiento de datos en tiempo real | Si | Si |
| Representación gráfica | Si | Si |
| Sistemas de alarmas | Si | Si |
| Uso de protocolos de comunicación (TCP/IP, WIFI, etc.) | Si | Si |
También se demuestra que ambos sistemas presentan similitudes en cuanto al uso de la tecnología, es decir, pueden utilizar el protocolo de comunicación (TCP/IP), e interfaces hombre-máquina (HIM, Human Machine Interface) para operar un proceso particular de forma remota. Además, ambos sistemas permiten la configuración de tareas, parámetros de medición y adquisición de datos en tiempo real, y presentan diferentes medios de almacenamiento para los datos recopilados, entre otros.
Conclusiones
Un laboratorio remoto puede ayudar a mejorar la enseñanza tradicional porque permite al estudiante interactuar de forma real y remota con los instrumentos de medición a través de una interfaz gráfica, en donde los aspectos reales de operación, límites, y medidas de seguridad del instrumento deben de ser considerados.
El subsistema SCAADOS cumple con los objetivos y requerimientos necesarios para sentar las bases de desarrollo de un laboratorio remoto con mayor capacidad de medición, debido a que presenta un funcionamiento adecuado, es intuitivo en su manejo y presenta una lógica de programación fácil de implementar. Además es escalable, portable y de fácil rediseño.
El desarrollo de este subsistema remoto propuesto presenta varias actividades a seguir ampliando, como los procesos de escalabilidad y de portabilidad ya comentados. También se puede agregar un sistema de control de energización remoto que ayude a mantener apagado o encendido al instrumento durante periodos de inactividad o de actividad, respectivamente. Asimismo, se puede agregar al subsistema un brazo robótico para que de forma remota se realicen las conexiones eléctricas que se requieran.

