










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería mecánica, tecnología y desarrollo
versión impresa ISSN 1665-7381
Ingenier. mecáni. tecnolog. desarroll vol.5 no.1 México sep. 2014
Artículos
Diseño y control de un sistema interactivo para la rehabilitación de tobillo: TobiBot
Cesar Humberto Guzmán Valdivia1,*, José Luis Carrera Escobedo1, Andrés Blanco Ortega2 Marco Antonio Oliver Salazar2, Fabio Abel Gómez Becerra2
1 Universidad Politécnica de Zacatecas (UPZ). Coordinación de Ingeniería Mecatrónica. Plan de Pardillo s/n, Parque Industrial Fresnillo, CP 99059. Fresnillo, Zacatecas, México. * Autor de correspondencia: cesar.gzm@hotmail.com (C. Guzmán).
2 Centro Nacional de Investigación y Desarrollo Tecnológico (Cenidet). Departamento de Mecatrónica. Interior Internado Palmira s/n, C. P. 62490. Cuernavaca, Morelos, México.
Fecha de recepción: 24-03-2014
Fecha de aceptación: 15-05-2014
Resumen
Los seres humanos siempre están expuestos a sufrir lesiones en el tobillo que pueden causar un daño muscular permanente. No obstante, con una rehabilitación adecuada, el tobillo se cura rápidamente sin convertirse en un problema crónico. La rehabilitación en un sentido general tiene el objetivo de restablecer el movimiento perdido debido a un incidente traumático a través de terapia física. En este artículo se presenta el diseño y control de un sistema interactivo (TobiBot) de 1 gdl para pacientes que requieran de una rehabilitación de tobillo. Se presenta un análisis biomecánico de los movimientos básicos del tobillo de dorsiflexión/plantarflexión usando cinemática para determinar el diseño mecatrónico del rehabilitador. Se presenta una interfaz gráfica de usuario para facilitar la interacción hombre-máquina, también esta interfaz cuenta con un modo videojuego para la rehabilitación del tobillo. Se propone un esquema de control PID para gobernar los movimientos suaves y precisos de rehabilitación pasiva y un controlador de impedancia para movimientos de rehabilitación activa. Se presentan pruebas de funcionamiento del prototipo con pacientes sanos utilizando los esquemas de control propuestos para mostrar la respuesta suave y controlada de los movimientos de rehabilitación. Los resultados experimentales obtenidos demuestran el gran potencial de TobiBot para asistir en la rehabilitación de tobillo.
Palabras clave: Rehabilitación de tobillo, diseño mecatrónico, control, interfaz gráfica de usuario, videojuego.
Abstract
Humans are always at risk of ankle injuries that may cause permanent muscle damage. However, with proper rehabilitation, ankle heals quickly without becoming a chronic problem. Rehabilitation in a general sense aims to restore the lost motion due to a traumatic incident through physical therapy. In this paper, the design and control of an interactive system (TobiBot) of 1 DOF for patients who require ankle rehabilitation is presented. Abiomechanical analysis of the basic movements of ankle dorsiflexion/ plantarflexion using kinematics to determine the mechatronic design of the rehabilitation is presented. A graphical user interface is presented to facilitate human-machine interaction; also this interface includes a videogame mode for ankle rehabilitation. A PID control scheme is proposed for the smooth and accurate control movements of passive rehabilitation and an impedance controller for active rehabilitation movements. Prototype function tests with healthy subjects using the control schemes proposed to display smooth and controlled response rehabilitation movements are presented. The experimental results demonstrate the great potential of TobiBot to assist in the ankle rehabilitation.
Keywords: Ankle rehabilitation, mechatronic design, control, graphic user interface, videogame.
Introducción
Los seres humanos ocasionalmente pueden sufrir incidentes traumáticos que pueden causar daño muscular permanente. La articulación del tobillo es una de las estructuras de mayor soporte de peso del cuerpo humano. Como resultado de su función y configuración, el tobillo es la articulación más comúnmente lesionada. El esguince de tobillo resulta del desplazamiento hacia afuera del pie, rompiendo los ligamentos del tobillo. Puede ocurrir con frecuencia en actividades diarias laborales, deportivas y recreativas. El esguince de tobillo puede ser clasificado en 3 grados: el grado I es un estiramiento de los ligamentos, el grado II incluye algunas roturas parciales en uno o más ligamentos, y el grado III incluye la rotura completa de uno o más ligamentos [1]. El dolor de un esguince de tobillo es intenso y con frecuencia impide al individuo trabajar o practicar algún deporte durante un largo periodo de tiempo. No obstante, con una rehabilitación adecuada, el tobillo se cura rápidamente sin convertirse en un problema crónico.
La rehabilitación, en un sentido general, es el proceso en el cual a través de fisioterapia es posible recuperar las habilidades físicas perdidas debido a un incidente traumático. Existen cuatro niveles de recuperación dependiendo del nivel de actividad que el paciente requiera: pasiva, asistida, activa y resistiva [2], ver Figura 1. En la recuperación pasiva el paciente no interviene en lo absoluto en la ejecución del movimiento, por lo general el terapeuta realiza todo el esfuerzo. Una modalidad intermedia es la asistida donde se combina el esfuerzo del paciente y del terapeuta. La recuperación activa es cuando la persona realiza todo el esfuerzo por sí misma y en la resistiva se utilizan sistemas mecánicos donde se presenta una fuerza opuesta al movimiento del paciente.

El tobillo es una articulación de 3 gdl con movimientos similares a los de una unión esférica [3]. El tobillo puede realizar tres tipos de movimientos: 1) dorsiflexión/plantarflexión, 2) inversión/eversión y 3) abducción/aducción. La recuperación de un esguince de tobillo se logra principalmente rehabilitando la articulación mediante el movimiento de dorsiflexión/plantarflexión, que significa mover el pie de arriba hacia abajo, ver Figura 2. El intervalo de valor máximo para este movimiento es de -45° a 25°. Este ejercicio de rehabilitación es el más utilizado por el personal médico para reincorporar a una persona a sus actividades de la vida cotidiana.

Recientemente, se ha despertado el interés en varias universidades, centros de investigación y empresas alrededor del mundo por desarrollar máquinas y dispositivos que ayuden a rehabilitar y a fortalecer la parte afectada (por ejemplo: tobillo, rodilla, cadera, etc.), absorber el esfuerzo físico y repetitivo de la terapia, y ofrecer una mayor diversidad de terapias personalizadas con movimientos precisos y seguros. Por ejemplo, un tipo de máquinas utilizadas en las clínicas y hospitales para la rehabilitación pasiva de lesiones en el tobillo son las de movimiento pasivo continuo (MPC), que sirven como auxiliar a los pacientes para realizar movimientos repetitivos, ver Figura 3.

Los rehabilitadores para tobillo que se encuentran en proceso de desarrollo se pueden clasificar en robots paralelos y mecanismos. Los robots paralelos que se han propuesto se basan en la configuración mecánica de cadena cerrada en donde el efector final se une a la base por al menos dos cadenas cinemáticas independientes. Girone et al. [5] proponen un dispositivo para rehabilitación de tobillo llamado "The rutgers ankle". Este dispositivo de 6 grados de libertad (gdl) es controlado con actuadores neumáticos y cuenta con una interfaz para interactuar virtualmente mediante videojuegos con el paciente. Yoon y Ryu [6] proponen un robot paralelo reconfigurable para desempeñar distintos movimientos de rehabilitación. El mecanismo paralelo de 4 gdl es controlado con 4 actuadores neumáticos.
Liu et al. [7] proponen un robot paralelo de 3 gdl controlado con 3 actuadores eléctricos, ver Figura 4a. Presentan un prototipo físico y resultados de simulaciones numéricas. Tsoi y Xie [8] proponen un robot paralelo de 3 gdl que usa 4 actuadores para mejorar su controlabilidad y eliminar las singularidades. Los autores solamente presentan una propuesta en CAD del rehabilitador. Un esquema de control por impedancia fue implementado para permitir el control de la fuerza y movimiento para evitar lesionar al paciente. Saglia et al. [9] proponen un robot paralelo de 2 gdl para rehabilitar el tobillo, ver Figura 4b. El robot es controlado utilizando un controlador PD y es actuado redundantemente para evitar singularidades.4

Los dispositivos para rehabilitación basados en mecanismos que se han propuesto se basan en los movimientos básicos del tobillo. Homma y Usuba [10] proponen un rehabilitador para movimientos pasivos de tobillo de 1 gdl, ver Figura 5a. Este sistema es ajustable para aumentar el área de contacto entre la base del rehabilitador y el pie del paciente. Lin et al. [11] proponen un sistema de entrenamiento para tobillo de 1 gdl. Un esquema de control difuso fue implementado para controlar la posición y fuerza del rehabilitador. Los tipos de entrenamientos programados fueron pasivos y activos. Roy et al. [12] proponen un dispositivo para rehabilitación de tobillo llamado "Anklebot". Este dispositivo de 3 gdl es un rehabilitador portable controlado con actuadores neumáticos. Jamwal et al. [13] proponen un dispostivo de 3 gdl actuado neumáticamente para rehabilitar el tobillo, ver Figura 5b. Blanco et al. [14] proponen un prototipo virtual de una máquina de rehabilitación de tobillo de 3 gdl. Este dispositivo puede realizar movimientos combinados al tobillo como lo son círculos trazados imaginariamente por el dedo gordo del pie.

Muchos de los sistemas terapéuticos mencionados anteriormente fueron desarrollados únicamente para inducir movimientos de rehabilitación al tobillo. Por otra parte, pocos estudios tienen el objetivo de hacer divertida la rehabilitación mediante el uso de videojuegos, especialmente cuando se rehabilitan niños. La meta principal del sistema propuesto en este estudio - TobiBot - es la de proponer un dispositivo para rehabilitación de tobillo de 1 gdl en forma de patineta que cuente con una interfaz gráfica de usuario para interactuar con el paciente mediante videojuegos online gratuitos. El motivo por el cual TobiBot nada más cuenta con 1 gdl es debido a que tiene un enfoque más particular en la rehabilitación del esguince de tobillo y por consiguiente únicamente es necesario este movimiento. El sistema presentado en este artículo tiene la ventaja de ser mecánicamente y cinemáticamente más simple en comparación con otros dispositivos de varios gdl, mientras que al mismo tiempo, es completamente capaz de desempeñar los ejercicios requeridos por el personal médico para la rehabilitación de tobillo. Adicionalmente, los requerimientos de seguridad y versatilidad se satisfacen con el empleo de un sistema mecatrónico que combina una gran capacidad de fuerza con un excelente control de la posición.
Por otro lado, en términos de rehabilitadores de tobillo con videojuegos, el "rutgers ankle" es el sistema más cercano al TobiBot. Sin embargo, este sistema tiene pocos videojuegos debido a que fueron programados especialmente para el rehabilitador. La desventaja de contar con pocos videojuegos es que el paciente en pocas semanas se aburre y pierde el interés de la terapia. Lo que distingue al TobiBot de este sistema es que puede inducir movimientos de rehabilitación para tobillo y además funcionar con cualquier videojuego online gratuito. La rehabilitación interactiva de un esguince de tobillo usando el TobiBot se logra con videojuegos que sean de 1 solo movimiento. Esto significa que el usuario tiene que desplazar un objeto hacia arriba o hacia abajo utilizando como control el pie. Por ejemplo, si el usuario desea desplazar una nave espacial hacia arriba es necesario mover el pie hacia arriba. También existen videojuegos de equilibrio, destreza, repeticiones, etc. En cada caso el terapeuta decide cuales ejercicios son más adecuados para cada paciente.
Descripción del Sistema
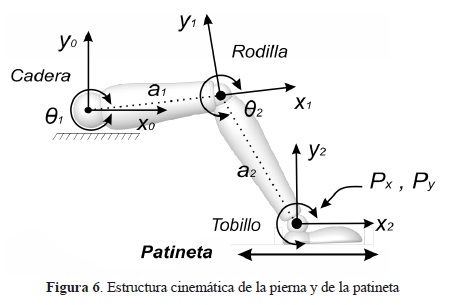
El TobiBot es un sistema mecatrónico de 1 gdl que consta de cuatro partes importantes: el diseño mecánico, la tarjeta de control, la interfaz y el controlador. Este prototipo es una sinergia de varias ramas de la ingeniería, por lo que se tienen que explicar cada una de sus partes a detalle para comprender la integración y el funcionamiento del sistema. El diseño mecánico de todo sistema para rehabilitación parte principalmente de la biomecánica de cada articulación. El diseño mecánico del rehabilitador está basado en el movimiento de dorsiflexión/plantarflexión de tobillo. Supóngase que el paciente se encuentra sentado en una silla y sube su pie en una patineta. La patineta por su configuración únicamente puede realizar movimientos hacia adelante y hacia atrás cuando se coloca el pie sobre la plataforma y se induce movimiento con la pierna. Este movimiento provoca que se genere un movimiento de dorsiflexión/plantarflexión en el tobillo. La cinemática en un sistema tiene como objetivo describir de manera analítica el movimiento espacial de un mecanismo mediante las relaciones entre la posición y la orientación del extremo final del mecanismo con los valores que toman sus coordenadas articulares. En la Figura 6 se muestra la representación geométrica de la pierna y de la patineta.
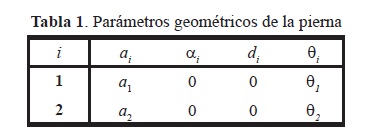
En la Tabla 1 se presentan los parámetros según la convención de Denavit-Hartenberg [15] (DH), donde: i representa el número de la articulación, ai representa la distancia a lo largo del eje xi, αi. se refiere al ángulo entre los ejes zi y zi+1, di representa la distancia entre los ejes zi y por último θi representa el ángulo con respecto al eje xi y xi+1.
El modelo geométrico directo (MGD) permite calcular la posición y orientación del tobillo en función de sus ángulos articulares. Para encontrarlo es necesario calcular la matriz de transformación homogénea i-1Ti de cada articulación usando (1).

Donde: Si = Sinθi, Ci = Cosθi y Sij = Sin(θi+θj)
Para obtener el MGD del movimiento del tobillo es necesario multiplicar las siguientes matrices 0P2= 0T1 0T2. La matriz de transformación que representa la posición y orientación del tobillo está dada por (2).

Por otra parte, el modelo geométrico inverso (MGI) puede determinar los movimientos articulares para llevar el actuador final a una posición cartesiana deseada. La solución de la cinemática inversa es fundamental para el seguimiento de trayectorias. Para encontrar el MGI de la pierna se realizaron algunas manipulaciones algebraicas para obtener las soluciones (3).

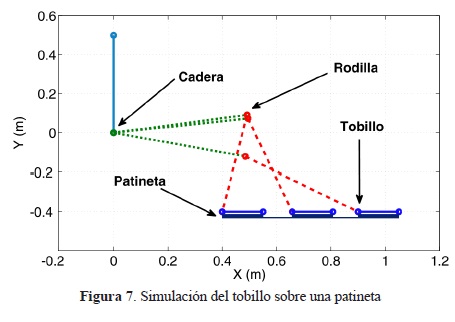
Con la obtención de las ecuaciones (2) y (3) es posible realizar una simulación en MATLAB para comprobar que el diseño mecánico a proponer puede cumplir con los movimientos de rehabilitación requeridos. En la Figura 7 se muestra el movimiento lineal del tobillo cuando se desplaza sobre una patineta. En la Figura 8 se muestran los valores articulares del tobillo alcanzados, como puede observarse los valores máximos articulares van desde -45° a 25°, lo que nos indica que es posible pasar a la etapa del modelo en CAD.

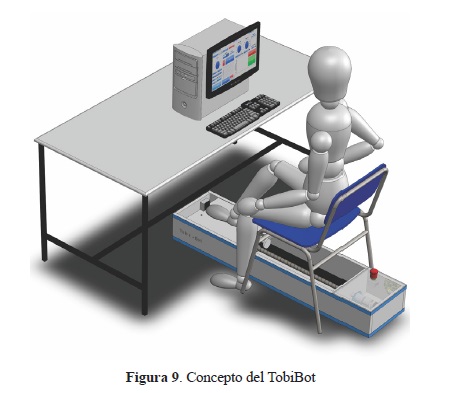
El concepto del sistema TobiBot para rehabilitación de tobillo se muestra en la Figura 9. Este sistema fue diseñado para ser utilizado en centros de rehabilitación ó en la comodidad del hogar, además cuenta con un mecanismo para ajustarse a cualquier tamaño de pie lo que garantiza el confort del paciente. También, cuenta con una interfaz gráfica de usuario (GUI, por sus siglas en inglés) para facilitar la programación de los movimientos y rutinas de rehabilitación. El modo de funcionamiento es el siguiente: el rehabilitador se encuentra localizado debajo de una silla, el paciente se sienta y coloca su pie sobre la plataforma, luego el mecanismo moviliza el pie hacia adelante y hacia atrás según la terapia de rehabilitación programada.
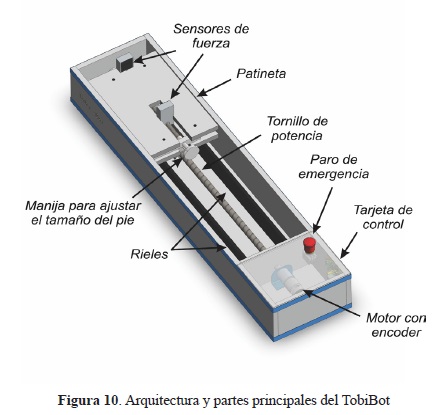
Las partes que conforman el prototipo se muestran en la Figura 10. Como puede observarse se distinguen 8 componentes esenciales para el funcionamiento del dispositivo. El tornillo de potencia sirve para convertir el movimiento rotacional del motor en movimiento lineal, los rieles guían y aseguran que el movimiento de la patineta siempre sea hacia adelante y hacia atrás. En la patineta se tienen montados los sensores de fuerza que son los encargados de monitorear la fuerza externa que ejerce el paciente, además en esta misma parte se incluye un mecanismo con una manija para ajustar el prototipo a distintos tamaños de pie. Otro punto importante es la seguridad del paciente. Las medidas de seguridad fueron implementadas a niveles de hardware y software. En la seguridad del dispositivo por hardware se tienen instalados interruptores fines de carrera al final del recorrido de la patineta y un paro de emergencia situado en la parte trasera del dispositivo para detener el dispositivo en caso de una situación de peligro. El sistema puede ser detenido totalmente por el terapeuta desconectando la fuente de alimentación por medio del botón de emergencia. Finalmente, se tiene contemplado un espacio dentro del prototipo para colocar el motor, la fuente y las tarjetas electrónicas.
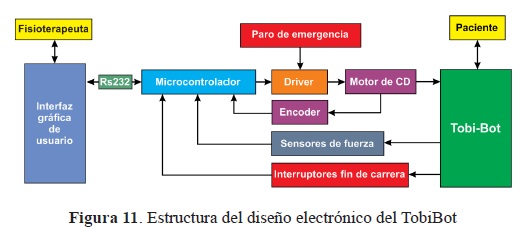
El sistema electrónico es el encargado de procesar las señales de los sensores y actuadores existentes en el dispositivo. En la Figura 11 se muestra un esquema del control interno del prototipo. El sistema de control electrónico principalmente se encuentra gobernado por un microcontrolador. Las tareas principales de este circuito son las de enviar señales de control al driver del motor, leer los pulsos del encoder, revisar los estados de los interruptores de emergencia, leer los voltajes entregados por los sensores de fuerza y finalmente enviar y recibir datos de la computadora a través del puerto serial mediante una interfaz rs232. La ventaja de utilizar un microcontrolador en vez de una tarjeta de adquisición es su fácil implementación y su bajo costo.
La interfaz gráfica de usuario es un complemento del TobiBot que facilita la programación de los movimientos y los programas de rehabilitación, ver Figura 12. Dentro de la interfaz existen 3 modos de operación: rehabilitación pasiva, rehabilitación activa y modo videojuego. En el modo de rehabilitación pasiva, la interfaz permite manipular el dispositivo para establecer la posición inicial y final del ejercicio de rehabilitación. También, tiene un generador de trayectorias planificadas para hacer movimientos precisos y suaves. En el modo de rehabilitación activa, el terapeuta establece la impedancia del mecanismo que estará opuesta a la fuerza del paciente. En este modo, la interfaz cuenta las repeticiones que realizó el paciente, así como el tiempo que ha estado rehabilitándose. Estos datos le ayudan al terapeuta a evaluar el progreso del paciente. El modo videojuego es una variante de la rehabilitación activa, debido a que el paciente tiene que aplicar fuerza para mover la patineta. La interfaz fue programada en el ambiente de Labview. El paro de emergencia por software que tiene a la mano el usuario se encuentra ubicado dentro de la interfaz. Este paro por software permite al usuario detener momentáneamente el ejercicio de rehabilitación o terminar la terapia en cualquier momento. En la interfaz existen 4 botones de paro resaltados con color rojo. Adicionalmente, el color verde denota inicio y las perillas y botones azules denotan configuración de algún parámetro.

La construcción del dispositivo fue basado en los diseños propuestos anteriormente, ver Figura 13. A continuación se detallan técnicamente los materiales y componentes utilizados. Las dimensiones principales del dispositivo son 1.3m de largo, 0.25m de ancho y 0.2m de alto. Las medidas de la patineta son 0.4m de largo, 0.20m de ancho y 0.05m de alto. Para el armado de la estructura se utilizó MDF de 16mm y tornillos de 1/2 pulgada. Los rieles fueron elaborados de ángulo de acero de 1 pulgada. El tornillo de potencia fue de 7/8 de pulgada de diámetro. Los baleros utilizados fueron de 8x20x5mm. El motor instalado es un EMG49 de 24v completamente equipado con encoders de 980 pulsos por revolución y una caja de reducción de 49:1. El torque de salida es de 1.5 Nm. Los sensores de fuerza son de Interlink Electronics y decrementan su resistencia cuando hay una fuerza aplicada sobre el área activa de 38x38mm. Estos sensores soportan hasta 10kg de fuerza. El microcontrolador utilizado fue un 16F877 de Microchip. Para la etapa de potencia se utilizaron MOSFET IRF540N e IRF9540N.

Estrategia de Control
Al inicio de una terapia de rehabilitación se realizan movimientos pasivos sencillos y de manera suave para evitar lesionar al paciente. Para llevar a cabo esta tarea es necesario implementar un controlador con seguimiento de trayectorias planificadas en el TobiBot. Para diseñar el controlador es necesario identificar el modelo dinámico del sistema, tal como se muestra en la Figura 14, x denota la posición de la patineta, m es la masa concentrada de la patineta y x es el torque proporcionado por el motor.

El modelo matemático de 1 gdl puede ser obtenido al aplicar la segunda ley de Newton o el formulismo de Euler-Lagrange y está dado por:

Donde: c es considerado el amortiguamiento viscoso
Para controlar la posición lineal de la patineta con el objetivo de obtener un movimiento de dorsiflexión/plantarflexión se considera la relación entre el movimiento angular del motor con el desplazamiento lineal, la cual es obtenida en (5).

Se propone el siguiente controlador para el seguimiento de la posición deseada x*, tipo Proporcional Integral Derivativo-PID con prealimentación de la aceleración de la trayectoria deseada.

Si e=(x-x*), derivando (6) se puede conocer la dinámica del error en lazo cerrado:

Los parámetros kd, kp y ki son seleccionados de manera que el polinomio característico de (8) sea Hurwitz (raíces en el semiplano complejo izquierdo), para garantizar que la dinámica del error sea globalmente asintóticamente estable.

La trayectoria de posición deseada suave para el movimiento de dorsiflexión/plantarflexión está dada por el siguiente polinomio de Bézier:

Donde: la posición inicial es x*(f) y la posición final es x*(tf), de manera que la patineta del rehabilitador inicie desde la posición inicial y vaya a la final.

Los parámetros de la función x*(t) son γ1=252 , γ2=1050, γ3=1800 , γ3=1575, γ4=700, γ5=126.
El sistema de control interactivo es una rehabilitación activa en donde el paciente hace todo el trabajo. Para este tipo de ejercicios es necesaria la implementación de un controlador que sea retroalimentado por sensores de fuerza. El control por impedancia tiene el objetivo de controlar la posición y fuerza ajustando una impedancia mecánica en el efector final para fuerzas externas generadas mediante el contacto. El control de impedancias puede ser dividido en pasivo y activo [16]. En el modo pasivo, la impedancia mecánica del efector final es alcanzada utilizando elementos mecánicos, tales como resortes y amortiguadores. En el modo activo, se utiliza un actuador retroalimentado basado en mediciones de posición y velocidad. El control de impedancia es la técnica de control más aceptada en rehabilitación para muchas aplicaciones. Para satisfacer los requerimientos de una rehabilitación activa, el fisioterapeuta selecciona una impedancia deseable en la cual el dispositivo ejerce una fuerza controlada en el tobillo del paciente. El controlador de impedancia es:

Donde: Md, Bd y Kd son constantes, representando la inercia deseada, el amortiguamiento y la dureza del sistema, respectivamente. x y xd representan la posición actual y deseada del efector final, y Fe representa la fuerza externa generalizada sobre el efector final.
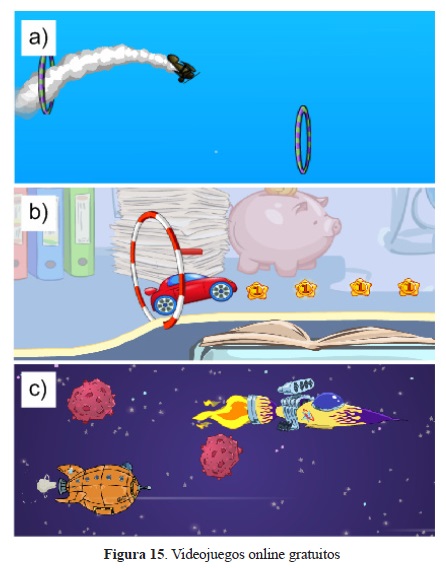
El modo videojuego del TobiBot es también rehabilitación activa. La Figura 15 muestra 3 videojuegos online gratuitos que pueden ser jugados únicamente con 2 movimientos del teclado. El sistema de control para este tipo de aplicaciones se realizó en Labview simulando la pulsación de las teclas arriba y abajo del teclado. Cada vez que se presionan los sensores de fuerza en el TobiBot se hace una emulación dentro de Labview como si el usuario estuviera presionando una tecla físicamente. De esta forma, se puede tener acceso a una gran cantidad de videojuegos en internet. El requisito principal es que sean movimientos simples de arriba y abajo. Por otra parte, el terapeuta es el responsable de la resistencia que aplica el controlador de impedancia para que el paciente se rehabilite.
Resultados experimentales
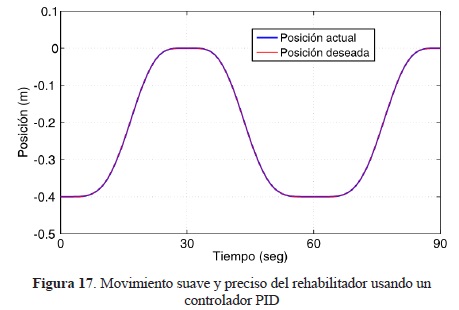
Las pruebas que a continuación se presentan son realizadas con una persona sana. En esta investigación primero el alcance se centra en obtener un prototipo funcional que sea capaz de alcanzar los rangos articulares del tobillo. Los resultados con personas sanas son recomendables para tramitar la certificación del dispositivo antes de ser probado con pacientes que requieren de una rehabilitación de tobillo. A continuación se presentan los resultados experimentales del TobiBot cuando se encuentra en modo de ejercicios pasivos. En la Figura 16, se muestra el prototipo induciendo un movimiento hacia adelante y hacia atrás por medio de la patineta para rehabilitar el tobillo. En esta prueba se seleccionó un paciente sano con una altura de 150cm y peso de 45kg. Los parámetros introducidos en el controlador son: Kp = 500, Kd = 25 y Ki = 250. EL peso de la patineta es de 12kg. La primera prueba consiste en que el rehabilitador desplace la patineta a través de una trayectoria planificada. En la Figura 17 se muestra la respuesta para el movimiento real y deseado del rehabilitador, utilizando el controlador PID (6). Se observa cómo se obtiene un desplazamiento suave de -40 a 0, utilizando (9). La Figura 18 muestra la acción de control del controlador. La Figura 19 muestra el error del controlador, se observa cómo se obtiene un error máximo de 0.4 mm. En esta prueba se le sugirió al paciente que utilizará la interfaz del TobiBot para que programara el movimiento de rehabilitación pasiva. Los resultados obtenidos indican un buen desempeño del controlador propuesto.



La segunda prueba que se realizó tiene que ver con la rehabilitación activa del tobillo. Para este experimento se utilizó el modo videojuego para que el paciente se divirtiera durante la terapia de rehabilitación. Como se observa en la Figura 20, el paciente está jugando un videojuego online gratuito utilizando el TobiBot. El juego consiste en hacer pasar un avión a través de unos círculos, ver Figura 15a. Para mover el avión es necesario mover la patineta de arriba hacia abajo usando el pie. En esta prueba el paciente se divirtió y además se rehabilitó con movimientos de dorsiflexión/plantarflexión en el tobillo. Como prueba final se le pidió al terapeuta que adicionara una resistencia a los movimientos de rehabilitación activa por medio del controlador de impedancia. Los parámetros propuestos fueron: Md = 10kg, Bd = 1 Nms/rad y Kd = 1 N/m. Ahora se le pidió al paciente que siguiera jugando como lo hizo en la segunda prueba. En la Figura 21 se muestra la respuesta para el movimiento real y deseado del rehabilitador, utilizando un controlador por impedancia (11). Se observa cómo se obtienen movimientos rápidos y bruscos de arriba hacia abajo que van desde un rango de 4cm a -7.5cm. Esto quiere decir que el controlador de impedancia ha restringido el movimiento del paciente debido a la oposición de una fuerza.

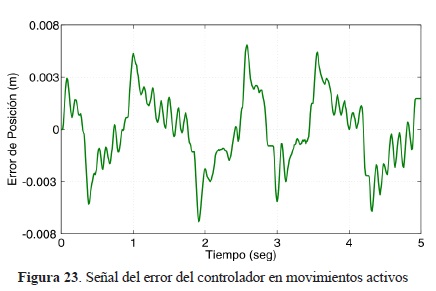
El controlador de impedancia puede ser ajustado para ayudar al paciente en movimientos de rehabilitación asistidos y resistivos. En la Figura 22 se muestra el controlador de impedancia utilizando toda la fuerza del motor (1.5 Nm), a comparación de la Figura 18, en el modo de rehabilitación activa es necesario un mayor esfuerzo de control. En la Figura 23 se muestra el error de posición, como se observa el error máximo es de 7 mm. Esto es debido a que la trayectoria de posición deseada en la rehabilitación activa no es prealimentada con la aceleración deseada como sucede en el caso de la Figura 17. En un caso práctico este error no es significativo debido a que en la rehabilitación activa la articulación del tobillo se encuentra recuperada al 90% y el paciente está consciente del movimiento. Si el paciente fuera recién operado entonces requiere de una rehabilitación pasiva en donde no puede haber errores en el movimiento suave, como lo es el ejemplo de la Figura 19. Este error no tiende a cero debido a que existen perturbaciones constantes como lo es la fricción, el peso de la pierna del paciente, el apriete de las uniones mecánicas, el amortiguamiento viscoso, entre otras. Como se observó en los resultados el controlador PID ante estas perturbaciones constantes presenta un error casi despreciable. A pesar de que existieron errores casi despreciables se obtuvo una buena respuesta en ambos tipos de rehabilitación.

Discusión del procedimiento para realizar pruebas con pacientes
La Ley General de Salud en México en su artículo 262 establece: "Para los efectos de esta ley, se entiende por equipo médico: los aparatos, accesorios e instrumental para uso específico destinados a la atención médica, quirúrgica o a procedimientos de exploración, diagnóstico, tratamiento y rehabilitación de pacientes, así como aquellos para efectuar actividades de investigación biomédica". Según el artículo 83 del Reglamento de Insumos para la Salud, el dispositivo TobiBot es un dispositivo Clase I. Un dispositivo Clase I es un insumo conocido en la práctica médica y que su seguridad y eficacia están comprobadas y, generalmente, no se introducen al organismo. Para obtener una certificación de uso médico del dispositivo TobiBot es necesario presentar una solicitud con los siguientes puntos:
• Descripción del producto
• Listado de componentes o partes del producto
• Finalidad de uso
• Precauciones
• Advertencias y leyendas alusivas
Una vez obtenida la certificación es posible realizar pruebas experimentales con pacientes que requieren de una rehabilitación en el tobillo. El alcance de este artículo es mostrar la parte técnica necesaria para certificar el prototipo TobiBot y mostrar sus beneficios para el paciente. Las pruebas para validar el prototipo para su comercialización prácticamente son las mismas pero con la diferencia de rehabilitar a un paciente. 1) El prototipo debe alcanzar el máximo movimiento de plantarflexión/extensión que es el ejercicio más utilizado en un esguince de tobillo. 2) El controlador PID debe proporcionar trayectorias suaves y controladas en el tobillo. 3) El paciente no debe presentar dolor al momento de realizarle los ejercicios de rehabilitación.
Conclusiones
En este artículo se propone el diseño y control de un sistema interactivo para la rehabilitación de tobillo llamado TobiBot. Se analiza la biomecánica de tobillo para diseñar un dispositivo con el fin de inducir un movimiento básico de dorsiflexión/plantarflexión. La idea es ofrecer un dispositivo que sea capaz de proporcionar movimientos de rehabilitación pasivos y activos mediante la combinación de una interfaz interactiva y el uso de videojuegos online gratuitos. También, se presenta el diseño mecatrónico de un sistema de 1 gdl con la ventaja de ser simple y funcional para la rehabilitación de esguince de tobillo. En este sistema se implemento un controlador PID y uno por impedancia para gobernar el mecanismo. Ambos controladores mostraron un buen desempeño en el seguimiento de trayectorias planificadas. Los movimientos de rehabilitación del dispositivo se basaron en las estrategias de control propuestas. Los resultados experimentales obtenidos validan el funcionamiento del TobiBot. Además, se planteó el procedimiento para validar clínicamente el dispositivo TobiBot. Finalmente, como trabajo futuro se tiene contemplada la certificación del dispositivo para realizar pruebas con pacientes que requieren de una rehabilitación de tobillo debido a un esguince.
Referencias
[1] Ivins, D. (2006). Acute Ankle Sprain: An Update. American Family Physician, 74(10), 1714-1720. [ Links ]
[2] Prentice, W. (2001). Técnicas de rehabilitación en la medicina deportiva, tercera ed., Paidotribo, España. [ Links ]
[3] Chaitow, L. , Walker, J. (2007). Aplicación clínica de las técnicas neuromusculares. Extremidades inferiores, segunda ed, Paidotribo, España. [ Links ]
[4] http://www.surgi-careinc.com/products/ankle-cpm-machine, Consultado el 28/02/2014.
[5] Girone, M., Burdea, G, Bouzit, M. (1999). The Rutgers Ankle Orthopedic Rehabilitation Interface. Proceedings of the ASME Haptics Symposium, Vol. 67, 305-312. [ Links ]
[6] Yoon, J., Ryu, J. (2005). A Novel Reconfigurable Ankle/Foot Rehabilitation Robot. International Conference on Robotics and Automation - IEEE, 2290-2295. [ Links ]
[7] Liu, G, Gao, J., Yue, H., Zhang, X., Lu, G. (2006). Design and Kinematics Simulation of Parallel Robots for Ankle Rehabilitation. Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation, 1109-1113. [ Links ]
[8] Tsoi, Y. H., Xie, S. Q. (2008). Design and Control of a Parallel Robot for Ankle Rehabilitation. 15th International conference on Mechatronics and Machine Vision in Practice, 515-520. [ Links ]
[9] Saglia, J. A., Tsagarakis, N. G, Dail, J. S., Caldwell, D. G. (2009). A High Performance 2-dof Over-Actuated Parallel Mechanism for Ankle Rehabilitation. IEEE International Conference on Robotics and Automation, 2180-2186. [ Links ]
[10] Homma, K., Usuba, M. (2007). Development of Ankle Dorsiflexion/Plantarflexion Exercise Device with Passive Mechanical Joint. Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, 292-297. [ Links ]
[11] Lin, C. K., Ju, M. S., Chen, S. M., Pan, B. W. (2008). A Specialized Robot for Ankle Rehabilitation and Evaluation. Journal of Medical and Biological Engineering, 28(2), 79-86. [ Links ]
[12] Roy, A., Krebs, H. I., Williams, D. J., Bever, C. T., Forrester, L. W., Macko, R. M., Hogan, N. (2009). Robot-Aided Neurorehabilitation: A Novel Robot for Ankle Rehabilitation. IEEE Transactions on robotics, 25(3), 569-582. [ Links ]
[13] Jamwal, P. K., Xie, S., Aw, K. C. (2010). Design Analysis of a Pneumatic Muscle Driven Wearable Parallel Robot for Anlde joint Rehabilitation. IEEE/ASME International Conference on Mechatronics and Embedded Systems and Applications (MESA), 403-408. [ Links ]
[14] Blanco-Ortega, A., Vázquez-Bautista, R. F., Vela-Valdes, G., Marmol-Márquez, E., López-López, G. (2013). Control de un prototipo virtual de una máquina de rehabilitación de tobillo. Revista Facultad Ingeniería Universidad de Antioquia, No. 67, 183-196. [ Links ]
[15] Sciavicco, L., Siciliano B. (2005). Modeling and Control of Robot Manipulators, Springer, Great Britain. [ Links ]
[16] Hogan, N. (1985). Impedance Control: An approach to manipulation. Journal of Dynamic Systems, Measurement, and Control, 6(4), 1-24. [ Links ]

