











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
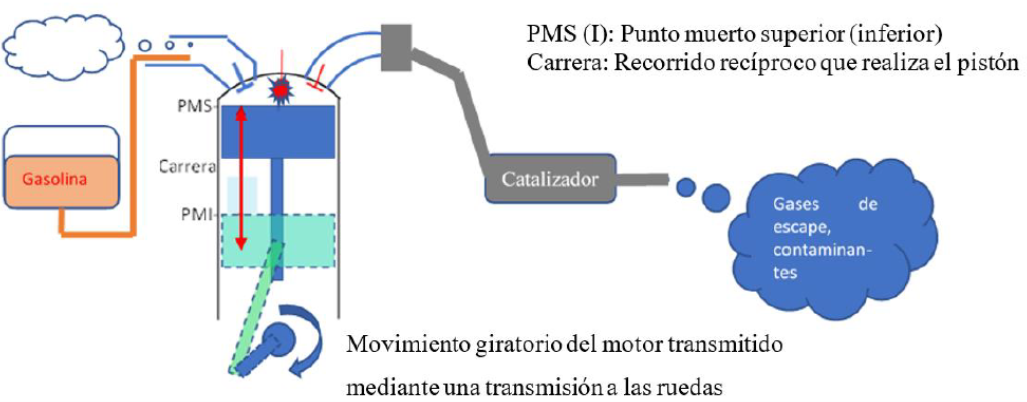
A nivel mundial, la tecnología para la movilidad urbana está empezando a emplear energías de origen renovables como estrategia para responder a la creciente exigencia por parte de los gobiernos para que los motores de combustión interna (MCI) -que funcionan empleando la energía química que proporciona la gasolina y diésel- reduzcan su consumo y generen menos contaminantes, como CO2, CO, NO3, hidrocarburos y partículas de materiales (PM) que forman la capa de niebla azul-grisácea que cubre a las grandes ciudades (Yan y Emadi, 2014) y cambian el medio ambiente (Fernando, 2017) (Figura 1). Debido a esto, se han establecido legislaciones cada vez más estrictas en torno a la reducción del ruido, producción de gases contaminantes e incremento en la capacidad de recorrido por unidad de combustible de origen no renovable.
En respuesta a esos estrictos requerimientos, las compañías fabricantes de automóviles se encuentran trabajando en la investigación y desarrollo de sistemas de propulsión cuyo proceso de conversión se base en el uso de energías que provengan de origen renovable (Mangusson y Berggren, 2001). Estos sistemas pueden ser de dos tipos: los que solo emplean motores eléctricos (ME), que convierten la energía eléctrica en mecánica con una eficiencia en la conversión de alrededor de 92 % (Fathabadi, 2018b) y los híbridos, que usan la energía proveniente de la combinación del MCI con un ME (Passalacqua, Lanzarotto, Repetto y Marchesoni, 2018), logran como resultado final una eficiencia superior al que se obtiene de solo operar el MCI, dato que depende de varios factores de diseño, es decir de como interactúen el ME con el MCI , en arreglo serie, paralelo o serie-paralelo, el tipo de ciclo del MCI, la gestión de energía o algoritmo de control, la durabilidad de la carga de la batería, del tamaño y tecnología del ME y de la tecnología del MCI.
La tecnología de los automóviles propulsados por energía alternativa (eléctricos e híbridos) de origen renovable existe desde 1870 aproximadamente. Sin embargo, fue desplazada por el MCI que emplea la energía del combustible de origen no renovable debido a que este último era más económico, ofrecía una gran autonomía y una rápida recarga. Aun así, en la actualidad, los sistemas de propulsión eléctricos han recobrado un interés porque emplean energías alternativas de origen renovables (Mahmoudzadeh Andwari, Pesiridis, Rajoo, Martinez-Botas y Esfahanian, 2017), aunque todavía falta para que se puedan mejorar sus puntos débiles, de modo que se optimice su competitividad (Guanetti et al., 2014; Palmer, Tate, Wadud y Nellthorp, 2018).
La diversidad de modelos eléctricos e híbridos sigue en aumento. Esto es sinónimo de la mejora en su concepto técnico, lo que permite incrementar su participación en un mercado mayormente cubierto por vehículos de combustión interna (Inegi, 2020; Palmer et al., 2018; Rodríguez y Lukie Srdjan, 2011).
Método
En este trabajo se presenta un resumen de una diversidad de desarrollos tecnológicos en los sistemas híbridos para la propulsión automotriz. Para ello, se buscaron en Google Scholar palabras clave como propulsión híbrida, autos eléctricos y conversión a híbrido. En total, se consiguieron cerca de 100 documentos publicados en 1978 y 2018.
Asimismo, se estableció una correspondencia con los sistemas movidos por MCI, es decir, la fuente de potencia, la estructura del sistema propulsor, el sistema almacenador de energía y el sistema de control de potencia.
Resultados
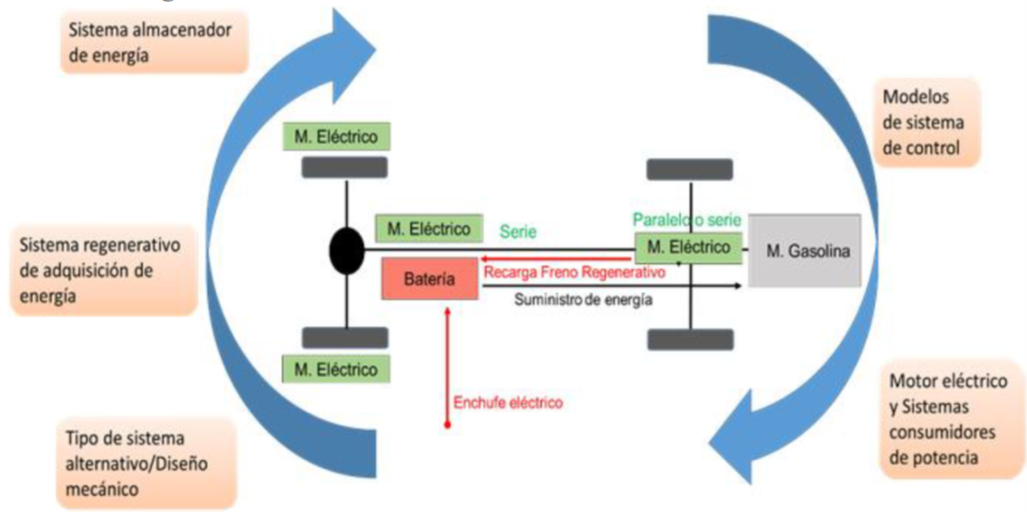
Se encontró que los sistemas de propulsión híbridos (gasolina y electricidad) presentan cinco áreas que describen el desarrollo tecnológico: unidad de potencia; sistema de control de potencia; sistema de almacenamiento de energía; estructura o arquitectura del tren motriz, y sistema para regenerar energía (Figura 2).
Unidad de potencia en los vehículos eléctricos e híbridos
En los vehículos potenciados por motores eléctricos o híbridos, su sistema está compuesto por un motor eléctrico o por la combinación de motor eléctrico y motor de combustión interna. La transmisión del híbrido es similar a la del MCI, mientras que en el eléctrico solo es un reductor de velocidad del ME, lo que incrementa su par entregado a la rueda. Respecto al diferencial, este depende del diseño y disposición de los ME (Farina et al., 2018; Guan, Zhu, Afinowi, Mipo y Farah, 2016).
El motor eléctrico provee la potencia que el vehículo demanda y puede presentar diversa localización, dependiendo del diseño específico del automóvil, tanto en vehículos eléctricos puros o híbridos (MCI-ME). La fuente de energía por medio de baterías (debido al gran tamaño que pueda tener) se encuentra localizada generalmente entre las ruedas, debajo de los ocupantes del automóvil (Mehrdad, Yimin y John, 2007; Shen, Shan y Gao, 2011).
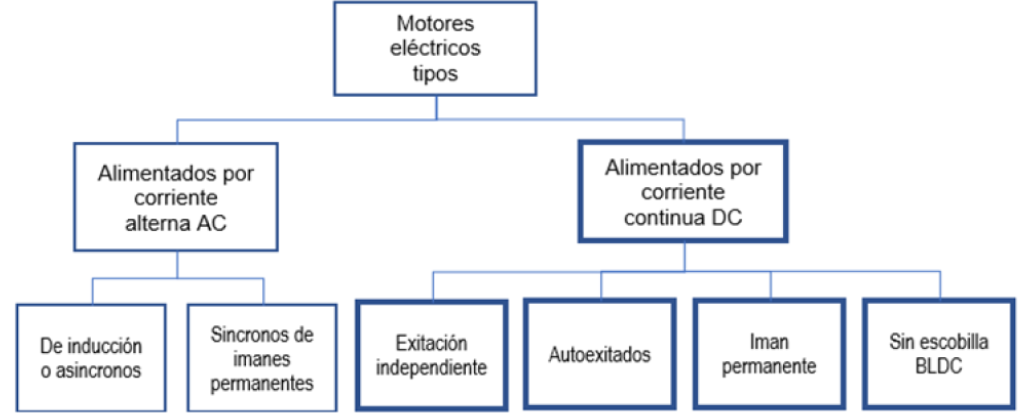
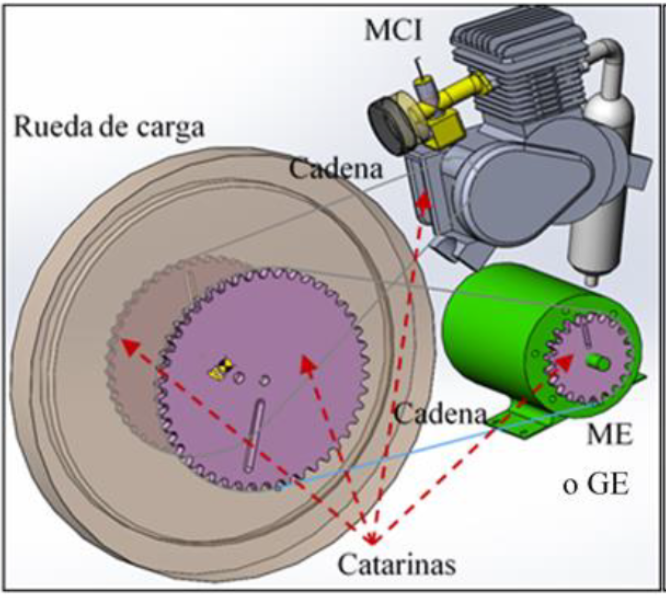
Los VE, como los HEV, emplean motores eléctricos del tipo de inducción o de imán permanente, de corriente directa o alterna, trifásico o monofásico, para transformar la energía eléctrica en energía mecánica; mientras que para los híbridos se cuenta con un MCI que interactúa con el motor eléctrico apoyando la potencia y/o moviendo un generador de corriente eléctrica (Figura 3).
En estos últimos la interacción entre el motor eléctrico y el de combustión interna se da de diferentes formas, y se clasifica en serie, paralelo o serie paralelo. La selección de motores está fundamentada en estudios comparativos que permiten elegir el ME y la tecnología que cumpla mejor las características definidas para el vehículo y condiciones de manejo a que será sometido. Por ejemplo, en un estudio por simulación para un vehículo mediano de lujo, el tipo IPM es más eficiente (entre 2 % y 3 %) que el IM debido al mejor torque a baja velocidad (Guan et al., 2016).
El VE, al ser impulsados por ME, no requiere de caja de velocidad para convertir velocidad por torque debido a que proporciona alto torque desde el inicio de su velocidad; no obstante, al usar una caja de velocidades con dos cambios se puede reducir el tamaño de la batería o tener menor consumo energético (entre 14.01 % y 17.83 %) (Ruan, Walker, Zhang y Wu, 2017).
Por otro lado, los VE pueden requerir mayor potencia para mover más peso sin sacrificar velocidad, por lo que la investigación de un motor eléctrico con doble estator muestra una factibilidad según los resultados dados al aplicarlo en una bicicleta. Esto proporciona un par de 16.2 N-m, que en equivalencia a un ME sencillo requeriría de un motor más grande y con mayor peso (Farina et al., 2018).
La tecnología donde el ME y el MCI proporcionan en conjunto par motriz a las ruedas cuenta con un embrague para realizar en el momento requerido el engarce o desengarce de la potencia del MCI, de modo que en un momento dado queda solo la propulsión por el ME, lo cual depende de las necesidades que la conducción demande, así mostrados en la patente (Trent J. US 2018/0022200 A1, 2018).
Hay vehículos híbridos cuya potencia es suministrada por el ME, por el MCI o conjuntamente. Esta selección se logra mediante un sistema de control automático que determina la fuente según el requerimiento que exija las condiciones de manejo en el momento dado. Así se pueden manipular las velocidades límites donde se realizarán estos cambios (Porras et al. US 9,884,619 B2, 2018).
Con base en lo anterior, el tipo de ME por elegir está supeditado a las características del vehículo: peso, dimensiones, carga aerodinámica, tipo de rueda, capacidad de carga, kilómetros para recorrer por carga, respuesta en la aceleración, peso/tamaño del ME, velocidad promedio y tope, área por donde circulará (tipo de ciclo de manejo), tamaño de paquete de batería, propósito del vehículo y rango de distancia/carga. Todo esto más las pruebas de simulación llevarán a elegir un motor DC o AC (Emadi, 2014).
Sistema de control de la energía
Este sistema controla la energía de la batería contra la demanda de potencia para lograr la máxima duración de carga y, en consecuencia, una mayor distancia por recorrer, es decir, gestiona la energía demandada según la disponible, la recuperada y la fuente (Capasso, Lauria y Veneri, 2017; Cao y Xiong, 2017; Passalacqua, Lanzarotto, Repetto y Marchesoni, 2017; Tremblay, Dessaint y Dekkiche, 2007).
Los vehículos eléctricos, al ser alimentados por corriente eléctrica, la toman del paquete de baterías y de los supercapacitores, donde se almacena la energía. Luego, dependiendo del gasto o su consumo, proporcionará el desempeño al vehículo. De esta forma, el control de la energía (gestión) es clave para la durabilidad de la carga y la vida de la batería (Figura 4). El modelado (algoritmo) de control suministra o recibe energía dependiendo de la condición de manejo, convirtiendo al ME en GE o activando un GE adicional en el momento adecuado. Mediante simulación de operación, se logra entender la gestión de energía de un modelo específico y eficientizar el algoritmo (Cao y Xiong, 2017; Gardner C. US 005,346,031, 1994; Tremblay et al., 2007).
Como ejemplo, tenemos la activación y desactivación del MCI o del ME mediante un embrague (Trent J. US 2018/0022200 A1, 2018), la activación o desactivación del ME o modo hibrido mediante un control automático en función a límites de velocidad manualmente establecidos (Porras et al., US 9,884,619 B2, 2018), y un control automático de selección de propulsión que, dependiendo del nivel energético del paquete de baterías previamente establecido, actúa como eléctrico o híbrido (Tribioli et al., 2014). Para situaciones donde el valor de control cae entre dos puntos de referencia o limitantes, lo cual demanda un ajuste o valor intermedio, se emplean controladores tipo difusos, lo que permite monitorear y ajustar según las condiciones topográficas. Esto, sumado al empleo de supercapacitores, mejora el estado de carga energética de la batería (Michalczuk, Ufnalski y Grzesiak, 2018).
En los vehículos híbridos, el modelado de control ajusta al inversor a establecer una gestión energética óptima respecto a las demandas de manejo, con lo cual se disminuyen las aceleraciones bruscas. Esto, al ser evaluado en el ciclo de manejo US06, reduce el consumo de energía eléctrica (Anwar, Teimor, Savagian, Saito y Matsuo, 2016).
Los sistemas de almacenamiento de la energía se ven afectados por las altas temperaturas que alcanzan durante su operación, lo que disminuye la capacidad de recorrido del vehículo. La inteligencia artificial basada en algoritmos genéticos mejoran la gestión de la carga/descarga y el flujo de energía para temperaturas mayores a 60 º C; no obstante, las altas temperaturas afectan la vida de la batería (Panday y Bansal, 2015).
Para vehículos HEV tipo paralelo, las RPM relativas entre el MCI y ME establecen la división de la carga y la potencia requerida. Así es factible predecir la requerida al MCI, con lo que se disminuye el consumo de 5.44 L/100 km a 5.33 L/100 km, para un patrón de manejo preestablecido (Denis, Dubois, Trovao y Desrochers, 2017; Qi, Xiang, Wang, Wen y Ding, 2017), y empleando lógica difusa se reduce 7.7 % en uso energía (Salman, Schouten y Kheir, 2000). Los modelados predictivos que aprenden y se anteponen al manejo logran incrementar el SOC, reduciendo la emisión de CO2 de 7 % a 1 % (Fadul, Aris, Misron, Halin y Iqbal, 2018), o la simulación realizada al comparar resultados y ajustar valores predictivos siguiendo el ciclo de manejo US06 (Huang et al., 2017; Uthaichana, De Carlo, Bengea, Zefran y Pekarek 2011).
El sistema de control automático de la gestión de energía es complejo, aunque se simplificó al hacerlos selectivos manualmente para que su selector referencie el tipo de manejo. El diseño en estudio de cuatro opciones por elegir muestra una reducción de combustible de origen no renovable de 3 % (Maamria, Gillet, Colin, Chamaillard y Nouillant, 2018).
Tomando el desarrollo de un sistema con potencia en cada rueda de manera independiente, un sistema de control que maneje la potencia entre las ruedas sin que una quede saturada para cubrir la necesidad, un sistema que maneje el torque vectorial eléctrico de accionamiento del eje trasero (TVeRAD), y esto mismo aplicado al eje frontal, permite modular la distribución de potencia entre las ruedas y controlar a mínimo la giñada del vehículo. Esto logra estabilidad y buen torque a alta velocidad (140 km/h), mientras que otros sin este control son inestables (Alcantar y Assadian y Kuang, 2018).
Al emplear celda de combustible para generar energía eléctrica, esta es de baja magnitud, por lo que requiere un paquete de baterías y supercapacitores. Así, el sistema de control debe de gestionar la energía entre estas tres fuentes y ser efectivo en los diversos ciclos de manejo normativos (Boukhnifer, Ouddah, Azib y Chaibet, 2016; Marzougui, Amari, Kadri, Bacha y Ghouili, 2017). Los controles por algoritmos genéticos y un programa metaheurístico para HEV con celda de combustible también dan buenos resultados, pues reducen entre 20 % y 33 % el consumo de gasolina (Melo, Ribau y Silva, 2014).
Sistema almacenador de energía
Los vehículos eléctricos impulsados por energías de origen renovable almacenan la energía en el paquete de baterías, en los supercondensadores y, en caso adicional, en el tanque de gasolina o diésel para vehículos híbridos de MCI (Burke, 2007).
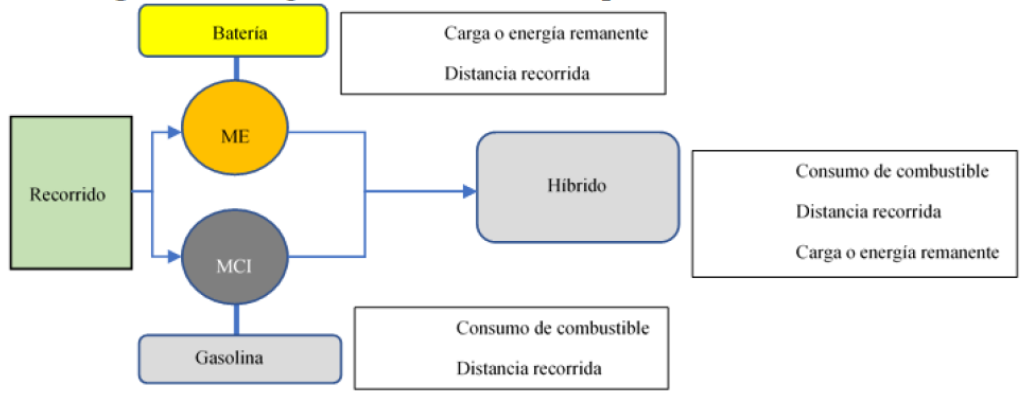
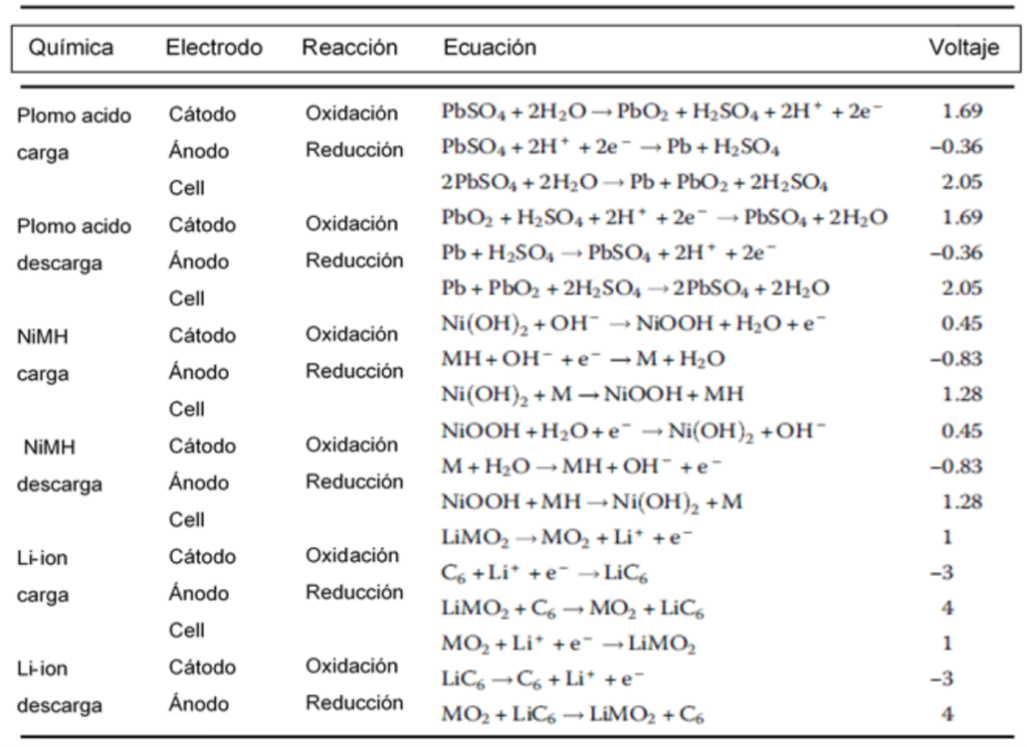
Para utilizar y convertir la energía de origen renovable en movimiento mecánico y lograr la propulsión, esta se almacena y toma de baterías cuya tecnología permite descargar y recargar energía eléctrica, y cuya capacidad depende de su química (Figura 5) (Hayes y Goodarzi, 2018).
La batería de iones de litio es la más empleada por su proceso de manufactura, la cantidad de energía y la fuerza que suministra, las cuales se disponen en serie y paralelo para lograr los valores de voltaje y corriente necesarios (se denominan paquete de batería). Esto es apoyado por ultracapacitores de carbono-carbono para manejar cargas grandes requeridas en las aceleraciones, lo que protege a las baterías que son susceptibles a reducir su vida y capacidad por cargas elevadas y repetitivas, incrementando en 28.6 % la eficacia en comparación con los sistemas tradicionales de baterías (Song et al., 2018).
El manejo de la gestión de energía entre los elementos que la almacenan y demandan se realiza a través de controles que proporcionan información sobre las condiciones de manejo, la dinámica de la ruta, el nivel de carga de la batería y del ultracapacitor. De esta manera, se proporciona la adecuada respuesta por el controlador, que puede llegar a obtener un incremento de 2 h del SOC (Sreedhar, Siegel y Choi, 2017). Este resultado se puede mejorar dependiendo del ultracapacitor tipo C y de la batería. Un ejercicio simulado en Simulink-Matlab, dado con baterías Zebra y convertidor DC-DC (Capasso y Veneri, 2017) para un ciclo urbano, empleando resistencias equivalentes y posteriormente pruebas similares realizadas en banco de pruebas, mostró que el sistema se apega a los requerimientos dinámicos demandados, lo que brinda confiabilidad para futuras pruebas de durabilidad (Capasso y Veneri, 2017).
Por otro lado, un estudio sobre el uso de fuente de energía fotovoltaica en lugar de un MCI en un HEV muestra mayor capacidad de recorrido en 19 km al correspondiente logrado cuando se usa exclusivamente como fuente de energía el paquete de baterías (Fathabadi, 2018a).
Arquitectura del sistema de propulsión por energía alternativa
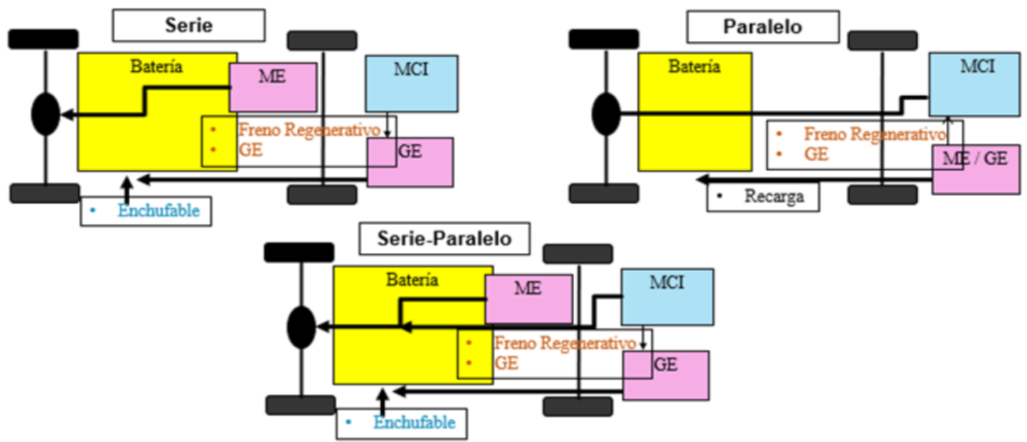
El tamaño y configuración del ME da la libertad de establecer diferente localización técnica para proporcionar la potencia al freno con su correspondiente sistema de almacenaje de energía y la interacción con el MCI, lo que permite obtener diversos efectos en el desempeño del vehículo (distancia recorrida por SOC, estabilidad de manejo, etc.). Esta distribución se conoce como arquitectura y se agrupa en tres: serie, paralelo y serie-paralelo (Figura 6). Se encuentran en eléctricos (EV), híbridos (HEV), enchufables (PHEV), enchufables con retorno de carga a la red-V2G, celdas de combustible (FCHEV), por celdas solares y turbo-aire generador (Bloom, Niu y Krishnamurthy, 2013).
El concepto PHEV permite recargar el paquete de baterías enchufándolo a la red eléctrica, lo que brinda mayor capacidad de recorrido y menor activación del MCI en comparación con el HEV no enchufable. Se encuentra en vehículos medianos con arquitecturas tipo paralelo o serie-paralelo, y tipo serie para vehículos grandes (Amjad, Neelakrishnan y Rudramoorthy, 2010; Bayindir, Gozukucuk y Teke, 2011; Guanetti et al., 2014). De estas variantes que buscan mejorar la capacidad de recorrido por carga, precio y tiempo de recarga, se infiere que entre los años 2040 y 2060 se logrará que los vehículos propulsados por energía de origen renovable superen en desempeño y prestaciones a los vehículos tipo MCI (Safari, 2018; Shunsuke, 2015).
En vehículos eléctricos, al agregar una fuente de energía adicional a la batería (como las celdas solares o turbinas de viento que utilizan el aire de impacto al frenar) se logra un incremento de 18 % aproximadamente en la duración de la energía de la batería (Fathabadi, 2018a, 2018b). Asimismo, una celda de hidrógeno para generar energía eléctrica incrementa la duración de la almacenada (Fathabadi, 2018a).
Las baterías fuente de energía son muy susceptibles a las descargas y cargas rápidas, lo que afecta la vida y el estado de carga que proporcionan. Para protegerlas y reducir este efecto se agregan supercapacitores que proporcionan energía durante las cargas pico demandadas por las aceleraciones. Estos son recargados al disminuir la velocidad del vehículo mediante la conversión de energía cinética en eléctrica (sistema regenerativo de energía al frenar) o por celda solar, muy afín para proporcionar energía proveniente de fuentes con cero emisiones contaminantes.
Los VE se propulsan por un ME a través de energía renovable. En el caso de los vehículos híbridos, aún usan MCI de gasolina o diesel debido a la interacción con el ME. Así logran reducir el consumo de combustible y la emisión de gases contaminantes (entre 4.8 % y 52.1 % dependiendo del tipo de MCI y de la arquitectura y la interacción del ME con el MCI) (Canals Casals, Martínez-Laserna, Amante García y Nieto, 2016; Oh, Park, Lee, Seo y Park, 2017; Peng, Ou y Yan, 2018; Solouk, Shakiba-Herfeh, Arora y Shahbakhti, 2018; Teixeira y Sodré, 2018).
Sistema para recarga de energía durante la conducción
Con la finalidad de incrementar la capacidad de recorrido y la duración de la carga SOC proporcionada por el paquete de baterías, el sistema de almacenamiento de energía formado por el paquete de baterías y ultracapacitores reciben energía o recarga adicional a la suministrada cuando se conecta a la red eléctrica o cuando se activa el MCI con la función de generar energía eléctrica. Esta realimentación proviene de diferentes técnicas. La más aplicada hasta el momento con mucho beneficio se llama freno regenerativo (Figura 7). Este consiste en emplear la energía cinética lograda con la velocidad en energía eléctrica. De este modo se carga la batería y/o supercapacitores al frenar, empleando el torque contrario a la velocidad, generado al dirigir el movimiento del vehículo a mover un generador eléctrico. Así se reduce la velocidad, en lugar de emplear zapatas de fricción que hacen perder esta energía en calor (Gantt, Perkins, Alley y Nelson, 2011; Loukakou et al., 2013; Naseri, Member, Farjah y Ghanbari, 2017; Qiu, Wang, Meng y Shen, 2018a), o el uso de celdas de hidrógeno (Burke, 2007; Fathabadi, 2018c), y/o el uso de turbinas movidas por aire de impacto (Fathabadi, 2018d), y/o recarga por autoinducción sin conexión eléctrica (inductive power transfer IPT) (Joseph y Elangovan, 2018; Rim, 2018).
Discusión
La tecnología para movilizar vehículos empleando energía de origen renovable surgió paralelamente a la que utiliza energía no renovable. Sin embargo, debido a que esta última siempre ofreció más ventajas en lo competitivo y económico, se convirtió en la más explotada en el mercado, de ahí que su contraparte quedara casi que en olvido. De forma más detallada, se puede decir que los vehículos de MCI se destacaron sobre los vehículos eléctricos o híbridos debido a la autonomía que ofrecían por su carga de gasolina o diésel, a lo cual se debe sumar la facilidad de recarga, el menor precio del automóvil y otros aspectos inherentes al suministro del combustible y la propia tecnología. Por lo tanto, para cambiar esta realidad, los vehículos eléctricos o híbridos deben atender ciertos aspectos que se podrían resumir del siguiente modo.
El sistema de gestión de energía, por ejemplo, debe ser capaz de incrementar la autonomía y proteger al paquete de baterías, estableciendo el momento adecuado, la dirección del flujo de energía, la fuente de suministro y la intensidad de flujo energético según la necesidad y tipo de manejo.
Asimismo, el sistema de almacenamiento de energía debe de ser capaz de disminuir su peso, costo, tiempo de recarga, así como incrementar la capacidad de recargas y la seguridad de los ocupantes.
El sistema de potencia, igualmente, debe estar en concordancia con los sistemas de gestión y almacenamiento de energía, por lo que debe ser capaz de cambiar de motor a generador según la situación de manejo para contribuir al incremento de la autonomía y proteger el sistema de almacenamiento.
En definitiva, el continuo desarrollo e innovación de cada una de las áreas tecnológicas del vehículo eléctrico e híbrido lo llevarán a reducir y a equipararlos con los sistemas propulsados por MCI y revertir la tendencia de compra y venta en el mercado.
Conclusión
El desarrollo de vehículos eléctricos e híbridos, como estrategia para reducir los gases contaminantes y el consumo de combustible de origen no renovable, requiere de mayor desarrollo para igualar el desempeño y las características de los vehículos de MCI. Para ello, se debe hacer énfasis en mejorar el sistema de almacenamiento de energía para alcanzar mayores recorridos. En tal sentido, se debe incrementar la densidad de energía (kW/peso), reducir los costos, prolongar los ciclos de cargas y disminuir el tiempo de recarga. Los vehículos híbridos (HEV) y los vehículos enchufables a la red eléctrica (PHEV) son un paso intermedio de mejora en el camino a emplear de manera intensa la energía renovable para transportación, la siguiente Tabla 1, muestra ejemplos que podrían contribuir a conseguir dicho fin, acorde a Hannan, Azidin y Mohamed (2014, p. 147).
Tabla 1 Ejemplos de investigaciones-metodologías-resultados para mejorar la capacidad del HEV
| Solar-asistido bicitaxi eléctrico de tres ruedas. | El diseño de un bicitaxi es simulado mediante ADVISOR y es vinculado a Matlab-simulink para su análisis. | No emisiones contaminantes. Se mejora la eficiencia energética y desempeño, pero el diseño del tren de potencia se hace complejo y de alto costo. |
| Gestión de un sistema de energía para la conducción eléctrica de una patineta. | Experimentar el comportamiento de un sistema de propulsión eléctrica con frenado regenerativo y controlado por un FPGA central a través de LabVIEW con mediciones en tiempo real. | El frenado regenerativo incrementa alrededor de 20 % la duración de carga de batería; el sistema se hace costoso y complejo. |
| Modelado y simulado de un sistema de gestión de energía para un PHEV. | A través de Matlab-simulink es simulado el flujo de energía acorde al tamaño del vehículo para un determinado patrón de manejo de un PHEV. Los resultados se comparan con ADVISOR. | El modelo de gestión de energía mejora el desempeño del PHEV, reduciendo el consumo de combustible de origen no renovable por patrón de manejo. |
El empleo de simulaciones ayuda a valorar la efectividad de la investigación, lo que proporciona un preámbulo a lo que podría pasar al aplicarse en la vida real. Esto amplía la ventana de posibilidades para mejorar el rendimiento del vehículo y su competitividad comparativa con los MCI.
Futuras líneas de investigación
Los sistemas de transporte impulsados por energías renovables tienen un campo muy amplio de investigación. Sin embargo, se puede empezar por la gestión de energía con base en RPM en sistemas híbridos tipo paralelo o establecer una revisión para elegir baterías por densidad de carga y tiempo de recarga para la movilidad automotriz. Asimismo, una revisión de la investigación de motores eléctricos altamente eficientes para la aplicación automotriz, o la investigación y definición de los requerimientos técnicos para satisfacer el diseño de un vehículo híbrido serie-paralelo genérico.
Abreviaciones: vehículos eléctricos (VE), vehículos eléctricos híbridos (HEV), vehículos eléctricos híbridos enchufable (PHEV), vehículos eléctricos celda de combustible (FCVE), motor eléctrico de inducción magnética (IM), inducción magnética permanente (IPM), corriente directa (DC), corriente alterna (AC), trifásico corriente alterna (TAC), monofásico corriente alterna (MAC); motor de combustión interna (MCI), electric motors (EM), internal combustion engine (ICE).

