











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
A lo largo de su formación, el estudiante de ingeniería Biomédica del Instituto Politécnico Nacional (IPN) adquiere un conjunto de conocimientos que le permiten desarrollarse en diversas áreas de la salud. Por supuesto, entre estas diversas áreas se encuentra la medicina veterinaria, donde se le prepara para intervenir en el desarrollo de sistemas ortopédicos y de rehabilitación que permitan mejorar la calidad de vida de animales. Un ejemplo de esto se encuentra en el presente trabajo, gracias al cual, mediante un análisis de marcha y evaluación de las características de un animal de prueba, se pudo construir un sistema mecánico como recurso de apoyo en la rehabilitación de perros.
Antecedentes
Los perros con debilidad muscular en las cuatro extremidades tienen dificultad para desplazarse por sí mismos y requieren de un sistema de apoyo que complemente la función motora y contribuya a su movimiento independiente y recuperación. Existen antecedentes relacionados con la ortopedia en animales domésticos, principalmente en perros y gatos. Por ejemplo, en la icónica obra de Müller y Glass publicada en 1911, “Diseases of the dog and their treatment”, se describe el esqueleto del perro y algunas fracturas que puede presentar. Sin embargo, anteriormente las fuentes de referencia relacionadas con el tema de cirugía veterinaria contenían poca información detallada acerca de procedimientos quirúrgicos. Incluso, a principios del siglo XX todavía había escasa información sobre el tratamiento para resolver fracturas; se centraba más bien en el empleo de vendajes, férulas y yesos, manteniendo al animal en jaula hasta su recuperación (Wheeler, 2011).
Existen varias causas que pueden afectar la movilidad de los perros. Por ejemplo, las infecciones crónicas en los huesos u osteomielitis, que se caracteriza por un retraso en la unión o no unión de huesos cuando estos se fracturan. De hecho, la osteomielitis es una de las complicaciones más graves y frecuentes en el tratamiento de fracturas (Díaz y Durall, 1995).
Illescas (2003) menciona que los traumatismos se consideran lesiones de naturaleza interna o externa en el organismo, producen deformaciones que pueden ser elásticas o inelásticas y que al no ser tratadas pueden convertirse en fracturas. Las causas más comunes que las originan van desde accidentes vehiculares hasta heridas y lesiones ocasionadas por el ser humano.
Como lo menciona Suraniti (2011), existen otros factores que afectan la movilidad en los perros, las derivadas por lesiones neurológicas, tal y como lo es la mielopatía degenerativa o parálisis posterior o radiculomielopatía, una enfermedad neurológica progresiva de tipo autoinmune que afecta principalmente a perros adultos de talla grande. Por otro lado, también se deben considerar las deformaciones congénitas, las cuales no solo son evidentes en la estructura física del animal, existen diversos trastornos metabólicos y anomalías a nivel tanto molecular como celular que afectan la calidad de vida de los animales (Rojas y Walker, 2012).
Con el avance de la medicina en todos sus campos, incluyendo los métodos para el tratamiento de fracturas y alteraciones del sistema músculo esquelético en humanos, los veterinarios han hecho adecuaciones e innovaciones a estas técnicas para ser empleadas en el tratamiento de perros y gatos (Valadez et al., 2004). Hasta hace poco, la información relacionada con el empleo de prótesis en animales era escasa, tan solo algunos vestigios de las primeras prótesis diseñadas para animales, dentro de los cuales sobresale la diseñada por el general de la fuerza aérea estadounidense Harry A. Gorman, quien implementó una prótesis a un perro (Félix, 2008).
De acuerdo con autores como De la Fuente, García, Prandi, Franchy Peña(1997), algunos perros fueron diagnosticados con displasia y se les implementó una prótesis de cadera, una adaptación de la cirugía humana a la cirugía veterinaria, cuya base fue la misma que en humanos respecto al uso del cemento ortopédico para su implante, el empleo del polimetilmetacrilato como elemento de sujeción de la prótesis a modo de soporte para restituir el movimiento y función de la cadera canina.
Getty (1985) menciona que la anatomía es la rama de la ciencia biológica enfocada en la forma y estructura de los organismos. Es importante mencionar que una parte de la veterinaria se especializa en el estudio de la anatomía de los animales. Existen tres aproximaciones principales para abordar el estudio de esta ciencia: el enfoque sistemático, el topográfico y el aplicado. El método sistemático se centra en el estudio de la anatomía de acuerdo con los sistemas que componen el cuerpo y suele estudiarse siguiendo la siguiente división: osteología (esqueleto), sindesmología (articulaciones y ligamentos), miología (músculos), angiología (sistema circulatorio), esplacnología (vísceras), neurología, órganos sensoriales, etc. El método topográfico se sustenta en el método sistemático con la diferencia de que se enfoca en una parte específica del cuerpo. Finalmente, la anatomía aplicada se enfoca en hechos anatómicos que se relacionan con la práctica, tales como la cirugía y el diagnóstico.
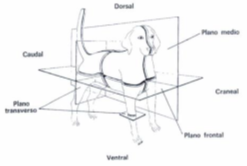
En términos direccionales, la posición anatómica en los perros se compara directamente con las coordenadas direccionales de los seres humanos. De acuerdo con Getty (1985), cuando el perro se encuentra en una posición cuadrúpeda o en una postura vertical, se pueden diferenciar diferentes regiones o planos con la finalidad de ubicar las estructuras que se encuentran en una región específica y facilitar su conocimiento. Para conocer estas regiones, se parte de la figura de un animal cuadrúpedo de pie como la que se observa en la Figura 1. El primer plano por identificar es el plano longitudinal medio que divide el cuerpo de forma vertical en dos partes iguales y regiones cercanas a este eje se le conoce como medial, de tal forma que a las regiones alejadas se les conocen como laterales o externas, paralelamente a este plano se encuentran los planos sagitales. El siguiente plano es el transverso, que atraviesa el plano longitudinal. En esta orientación se considera la región craneal o anterior como la parte del cuerpo que se encuentra más cercana a la cabeza y la región caudal o posterior en la que se encuentran estructuras cercanas a la cola. El plano frontal divide el cuerpo de manera horizontal, atravesando el plano longitudinal medio y el transverso. Las estructuras que se encuentran con dirección hacia el suelo se denominan ventrales, mientras que las que se dirigen hacia arriba se conocen como dorsales.
Sabiendo que cada animal es diferente uno de otro a pesar de pertenecer a una misma especie, es posible establecer un promedio o modelo normal para cualquier grupo de animales y reconocer las desviaciones de estos modelos.
König y Liebich (2001) definen el aparato locomotor de los perros como “un sistema orgánico complejo cuya función central consiste principalmente en desempeñar un trabajo mecánico” (p. 4). El aparato locomotor está compuesto por los músculos y el esqueleto, que no solo se integrade los huesos, sino también de los cartílagos, donde se incluye a las articulaciones y los ligamentos. Dentro de las funciones del aparato locomotor se encuentran el soporte, el modelado, la protección del cuerpo, la locomoción y función metabólica.
Los perros se consideran animales cuadrúpedos debido al movimiento de traslado que realizan mediante el uso de sus cuatro extremidades: las extremidades anteriores conocidas como miembros torácicos o extremidades pectorales y las extremidades posteriores conocidas como miembros pélvicos o traseras (Dyce, Sacky Wensing, 2012). Los cuadrúpedos cuentan con dos miembros anteriores también conocidos como brazos, estas extremidades terminan en manos con un número variado de dedos y la función principal radica en la locomoción (Carrier, Deban y Fischbein, 2008). El miembro anterior se conforma por: cinturón escapular, brazo, cuya base ósea es el hueso húmero, antebrazo, el cual lo constituyen los huesos cúbito y radio, y mano conformada por el carpo, metacarpo y dedos con tres falanges, esto se muestra en la Figura 2.

Por otro lado, la extremidad posterior de los cuadrúpedos está conformada por un sistema de segmentos, uniones y músculos los cuales proporcionan la propulsión en el movimiento del perro. Los músculos de la pierna actúan como extensores y flexores de la articulación del tarso y como extensores y flexores de las articulaciones de los dedos. Para mantener una posición en equilibrio, el tren posterior y anterior deben estar coordinados, de igual manera las angulaciones deben de corresponder, esto se observa en la Figura 3.

Las angulaciones traseras se consideran correctas cuando el hueso isquion forma un ángulo de 45°con la línea dorsal y 90° con el fémur. Por otro lado, el fémur debe conservar un ángulo de 90° con la tibia, de donde las angulaciones delanteras son correctas cuando el eje longitudinal del hueso escápula forma un ángulo de 45° con la línea dorsal y a su vez forma un ángulo de 90° con el húmero.
Planteamiento del problema
En los perros existen múltiples padecimientos que pueden limitar sus movimientos. Algunas enfermedades comunes que afectan su movilidad están relacionadas con traumatismos, enfermedades crónico-degenerativas, entre otras, un ejemplo de esto es la enfermedad discal intervertebral, que afecta de manera frecuente a perros de raza pequeña como los dachshund o perros salchicha. La falta de movimiento puede implicar mayores consecuencias degenerativas en los músculos y nervios, por lo que es necesario contar con una serie de dispositivos que brinden soporte y busquen una mejor adaptación para complementar la función motriz coadyuvando en su recuperación cuando estos presentan limitaciones en su movilidad.
Actualmente, el uso de prótesis en animales no solo se presenta por amputaciones, debido a enfermedades o algún tipo de cáncer, también se presenta cuando el animal sufre algún traumatismo. El desarrollo de prótesis adaptadas en animales ha evolucionado considerablemente y hoy en día no solamente se limita a extremidades, actualmente se han desarrollado diversas partes de la anatomía perdida o dañada (De la Cuenca, 1996). A pesar, desde el punto de vista evolutivo, las alas, aletas y brazos pueden considerarse como extremidades modificadas, los animales que por alguna circunstancia se ven obligados a emplear tres de sus extremidades son capaces de sostenerse casi de manera semejante a los que lo hacen con cuatro extremidades, pero con distribuciones de peso y puntos de equilibrio modificados o irregulares, lo que compromete a la larga la calidad de vida del animal y por ende puede significar una menor esperanza de vida (Callado, 2005).
En los perros, las prótesis que mayoritariamente se emplean son de cadera y en extremidades, de acuerdo con lo que mencionan Font y Closa (2006). En el caso de las prótesis de cadera, estas se emplean para el tratamiento de enfermedades degenerativas, traumatismos coxofemorales con fracturas irreparables o luxaciones de cadera crónica, y se tienen principalmente dos tipos; cimentadas o totales y las no cimentadas.
La prótesis total de cadera, según lo señalado por Mele, Corral, Pierce y Guerrero (2010), se implementa cuando se presenta dolor articular y compromete la movilidad, están indicadas en aquellos animales que han finalizado su crecimiento. Por otro lado, la prótesis de cadera no cimentada se emplea cuando el animal presenta una condición que no pone en riesgo su vida y con una alta posibilidad de recuperación. Estas prótesis están diseñadas con metales biocompatibles como lo es el titanio, su diseño permite el crecimiento del hueso sobre el implante, consiguiendo un anclaje permanente y evitando la utilización del cemento (Sánchez, Zúñiga, Bellver y Martínez, 2006). El uso de prótesis en una o más extremidades brinda a los perros una mayor movilidad, una solución al problema motriz. Cabe mencionar que en el andar de los perros las extremidades anteriores reciben el empuje mientras que las extremidades posteriores son importantes para el empuje y el trote del perro (Lima-Netto, 2002).
Por otro lado, existen diversos dispositivos como sillas de ruedas o andaderas que ayudan a mejorar el desplazamiento del animal, sin embargo presentan algunas limitaciones entre las que se encuentran los diseños, dado que estos están construidos para casos específicos, además de no incorporar elementos que contribuyen al movimiento de la musculatura de los miembros, lo cual es de suma importancia para la conservación del tono muscular y la prevención de atrofia. Ante esta problemática, la utilización de un mecanismo de apoyo es una alternativa viable que permite la recuperación de la función motora y con ello elevar la calidad de vida del animal.
Dado el contexto en el empleo de prótesis en animales, se planteó la siguiente pregunta de investigación: ¿la implementación de un sistema mecánico ayudará en la recuperación y rehabilitación de perros con problemas en las extremidades y mejorará su calidad de vida?
Justificación
Sin duda retomar el rumbo en las actividades cotidianas posterior a la pandemia por coronavirus de 2019 (covid-19) no es tarea sencilla, pues la emergencia sanitaria, entre otras cosas, afectó la vida de las personas, trastocó a los miembros de todo núcleo familiar, incluyendo a los animales de compañía. Durante estos días de confinamiento, se observó un aumento en el abandono de mascotas. Una de las causas que originó este fenómeno de abandono fue la falta de recursos para la manutención del animal, esto pone en riesgo de abandono a todos aquellos animales que, por alguna razón, se encuentran impedidos en su movilidad, siendo los perros los más afectados. El presente trabajo pretende analizar la viabilidad de construir un mecanismo de apoyo para perros que presentan una disminución en la función motriz en sus miembros torácicos y pelvianos como una muestra de ingeniería biomédica en la solución de problemas de áreas médicas. Este mecanismo busca ofrecer una alternativa para la caminata de manera asistida mediante el soporte del peso corporal y fomento al movimiento de las cuatro extremidades. El diseño de este mecanismo se basa en el análisis de la cinemática de marcha del perro, tomando como referencia parámetros considerados como normales en el andar, así como la prevención de atrofia muscular y degeneración del cartílago articular que afecten el desplazamiento y que induzcan a futuras alteraciones en la marcha del perro.
Objetivo general
Evaluar la funcionalidad de un sistema mecánico para la recuperación motriz de perros con debilidad muscular en las extremidades a partir de la reproducción de la secuencia de caminata semejante a los movimientos de un sujeto sano.
Objetivos específicos
Realizar el análisis de marcha de un perro para determinar las características de la estructura mecánica.
Construir un sistema mecánico capaz de brindar soporte a un perro de raza pequeña conservando los patrones de acuerdo con las fases de marcha.
Analizarla funcionalidad del sistema mecánico a partir de su implementación en un animal de prueba.
Tipo de estudio
Para el desarrollo del sistema mecánico se propuso un diseño cuasiexperimental de sujeto único. Para esto se contemplaron tres fases dentro de la metodología, las cuales comprendieron el análisis de la marcha de un sujeto de prueba, con los datos adquiridos se construyó el mecanismo y se implementó la electrónica necesaria para favorecer el movimiento y finalmente se realizaron las pruebas al sistema.
Metodología
Fase uno. Análisis de marcha
Se procedió a realizar el análisis de la cinemática de marcha de un perro de raza pequeña. En este estudio se optó por un perro de raza dachshund conocido coloquialmente como perro salchicha. La edad del animal se estimo aproximadamente en cuatro años. Los criterios que se tomaron en cuenta para la elección fueron:
Tipo de raza: dachshund.
Dimensiones físicas del animal: en general, talla pequeña con espalda larga en proporción a las extremidades
Características en la marcha: en apariencia general, sin alteraciones aparentes de la marcha.
Estado de salud: sin alteraciones físicas
Para la medición de marcha, se empleó una cámara convencional ajustada a una velocidad de grabación de 30 cuadros por segundo, montada en un soporte fijo a una distancia de dos metros del objetivo.
El sujeto de estudio mantuvo una caminata sobre una superficie plana y rígida de concreto manteniendo una trayectoria en línea recta con la intención de realizar la medición de los ángulos en el plano sagital en dos direcciones. Se aseguró una repetitividad en las mediciones a partir del análisis de datos en tres secuencias diferentes. De acuerdo con lo que mencionan Light, Steiss, Montgomery, Rumph y Wright (2010), se consideró que el andar tuviera una velocidad aproximada de 60 a 90cm/s y un mínimo de giro en la cabeza.
Para el análisis de marcha se obtuvieron medidas de las alturas en las estructuras de interés respecto al suelo, como se muestra en la Tabla 1.
Tabla 1 Medición de altura respecto al suelo en las estructuras de interés
| Parámetro | Longitud (cm) |
| Altura esternón-suelo | 11 |
| Altura brazo-suelo | 14 |
| Altura muslo-suelo | 15 |
Fuente: Elaboración propia
Posteriormente, se obtuvieron las medidas de los segmentos corporales del perro, como se muestra en la Tabla 2.
Tabla 2 Medición de segmentos corporales del perro en estudio
| Segmento corporal | Longitud (cm) | |
| Miembro anterior | Brazo | 8 |
| Antebrazo | 8 | |
| Mano | 3 | |
| Dedos | 4 | |
| Miembro posterior | Muslo | 9 |
| Pierna | 8 | |
| Pie | 3 | |
| Dedos del pie | 4 | |
| Tórax | Circunferencia | 35 |
| Anchura del pecho | 12 | |
| Anchura hombros | 18 | |
Fuente: Elaboración propia
Una vez obtenidos los datos anteriores, se procedió a realizar el análisis de marcha mediante la técnica de videográfica empleando el software Kinovea. Cabe mencionar que este software es gratuito y de código abierto, dedicado especialmente para aplicaciones biomecánicas, evaluación y medicina del deporte. Kinovea proporciona diferentes herramientas para el análisis en video como la medición de ángulos, longitud, seguimiento de trayectorias y mediciones de tiempo. En este estudio, se empleó la versión 0.8.15 del software. De esta manera, se midieron los ángulos de movimiento articular formados por los segmentos corporales en el instante inicial y final de cada fase de marcha en tres diferentes pasos y se obtuvo la media de cada fase.
Se asignaron las letras L, B, S y E para hacer referencia a las fases de elevación, balanceo, apoyo y empuje, de igual manera los instantes iniciales (i) y finales (f) de cada fase correspondientes a cada extremidad y los ángulos se consideraron respecto a la horizontal.
Con la información obtenida se procedió a realizar el diseño estructural del prototipo el cual debiera de soportar el peso del perro. De acuerdo con diferentes autores, cuando la tetraparesia se presenta, es necesario brindar apoyo para que el perro logre sostenerse y desplazarse; por consiguiente, la estructura también debe permitir la movilidad de las extremidades del perro y asegurar el mantenimiento del tono muscular, así como prevenir complicaciones futuras.
En el diseño de la estructura de soporte se consideró la distribución de peso en la parte craneal y caudal del cuerpo del animal, además de considerar la forma de las estructuras en la parte de soporte donde se apoyaría el peso del tronco del perro y que servirá además como base para la colocación de los actuadores y elementos electrónicos.
Es importante destacar lo mencionado por Nickel, Schummer, Seiferle, Siller y Stokoe (1986) respecto a que el centro de gravedad en el perro se ubica a la altura del noveno espacio intercostal en el proceso xifoides, por lo que se aseguró de tener un apoyo mayor en ese punto, dado que alrededor de este se afecta el centro de gravedad y el equilibrio. Cabe mencionar que los miembros anteriores se comportan como estructuras de sostén que soportan cerca de 60 % del peso corporal del animal y dado que la marcha se ejerce hacia adelante, la estructura debería de contar con un elemento de refuerzo en la parte anterior.
Fase dos. Construcción del sistema mecánico
El diseño de la estructura se realizó empleando la aplicación TinkerCAD, que es un software de diseño CAD en 3D de la empresa Autodesk. Esta herramienta permite el diseño de estructuras a partir de formas básicas, y al ser una herramienta en línea, no requiere ninguna instalación, esto permite realizar diseños complejos y su manejo es altamente sencillo; por último, permite generar archivos con extensión .stl que son comúnmente empleados para la impresión de estructuras en 3D.
Para la estructura del prototipo se evaluaron diferentes materiales optándose al final por el aluminio 6063 T5, debido a que sus características cumplen con los parámetros requeridos, por ser un material de alta resistencia y de baja densidad, tomada esta decisión, se emplearon barras de 3/8” de aluminio, como se muestra en la Tabla 3.
Tabla 3 Propiedades mecánicas y físicas del aluminio aleación 6063 T5
| Carga de rotura N/mm2 | Límite elástico N/mm2 | Límite a la fatiga N/mm2 | Resistencia a la cizalladura τ N/mm2 | Dureza Brinell (HB) | Densidad gr/cm3 |
| 215 | 175 | 150 | 135 | 60 | 2.69 |
Fuente: Elaboración propia
Para la unión de las piezas se emplearon tornillos y pijas, y se reforzaron con adhesivo epóxico. Adicional a la estructura, se colocaron un par de ruedas de plástico ligero en las vigas de soporte con el fin de facilitar el movimiento. Por otro lado, se calcularon los momentos de fuerza tomando en cuenta el peso corporal sobre la viga de aluminio de soporte central ubicada en el tórax, esto se muestra en la Figura 4.
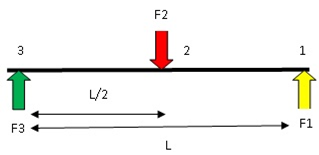
Si se considera que F1 y F3 son las barras de soporte de la estructura central, se tiene que:
L=12 cm
En la construcción de las partes móviles se optó por emplear material PVC espumado por ser ligero, aislante y resistente, esto permitió que fuera fácilmente moldeable mediante calor y poderlo aptar a las curvaturas de los miembros.
Para limitar el ángulo de movimiento en la articulación del carpo, se implementaron límites físicos en la estructura del antebrazo, con la finalidad de facilitar el movimiento de la mano sin impedirlo, pero respetando los límites máximos obtenidos en el análisis y para brindar una mayor sujeción de la estructura al miembro, se colocaron cintas de velcro.
Del análisis de marcha, se obtuvo que las articulaciones no exceden del límite establecido en 180° dado el origen, por lo que un servomotor de alto torque se consideró apropiado sin requerir de un algoritmo de control para su funcionamiento.
La elección del servomotor se realizó mediante el cálculo de torque necesario para mover la carga que representa cada extremidad. Cabe mencionar que las extremidades posteriores pesan aproximadamente15.25 % del peso total del cuerpo del perro.
Este porcentaje se considera como el máximo para cada extremidad, además de considerar el peso de la estructura para cada miembro, se obtuvo el total del peso a mover a partir de la siguiente fórmula:
M = F *d
En dicha fórmula, M=torque, F=fuerza y d= distancia.
El valor de M equivaldría a 7.5 kgf/cm, por lo que se eligieron actuadores con un torque superior a este valor.
El servomotor empleado fue el MG995, cuyas características son las siguientes:
Tamaño: 40.7 * 19.7 * 42.9mm; peso: 54g.
Torque: 15kgf/cm.
Temperatura de operación: -30 ~ +60°.
Rotation angle: máximo de 180°.
Corriente: 100mA.
Voltaje: 3-7.2V.
Velocidad de operación: Sin carga 0.17 seg/60°, con carga0.13 seg/60°.
Para la articulación del codo y la rodilla se eligió el servomotor, ya que el torque necesario es:
Que equivale a 1.5 kgf/cm, por lo que se optó por un servomotor tipo MG90S, que tiene un torque de 2.2 kgf/cm.
Para el circuito eléctrico se contempló un sistema de control mediante un microcontrolador con el fin de coordinar el movimiento de los actuadores a través de una secuencia obtenida producto del análisis cinemático realizado. Se optó por trabajar con una tarjeta Arduino la cual es una plataforma de creación de electrónica de código abierto, eligiéndose esta como sistema de control por la factibilidad de trabajar con sus 14 pines digitales enfocados para el manejo de los servomotores y la implementación de sensores de inclinación. El sensor empleado fue el SW-520D, mejor conocido como tilt switch o interruptor de bola, este se colocó sobre la estructura correspondiente a los segmentos de la mano en posición horizontal con el circuito abierto, de forma que el movimiento de las manos cierra el circuito y produce la señal de inicio de secuencia de paso.
Fase tres. Funcionalidad del sistema mecánico
Con el sistema construido en su totalidad, este fue acoplado al sujeto de prueba. El programade control de los mecanismos se basó en la lectura continua de los sensores al activar únicamente uno de estos, la señal producida se interpreta como señal de inicio de secuencia, iniciando de esta manera la secuencia con la extremidad en fase de elevación a la vez que los actuadores de las extremidades restantes se coordinan en las diferentes fases de acuerdo con la secuencia teóricamente establecida.
Al terminar un ciclo se vuelve a realizar la lectura de ambos sensores y se repite la operación anterior dependiendo del sensor activado, en caso de no haber lectura en ningún sensor se mantienen en posición de apoyo todas las extremidades.
Resultados
Los resultados del análisis de marcha se obtuvieron en tres secuencias diferentes para cada articulación tal y como se observa en la Figura 5.

Los valores de las mediciones fueron promediados y se obtuvieron los datos siguientes:
1) Medición promedio de los ángulos en las articulaciones en el miembro anterior izquierdo, esto se muestra en la Tabla 4.
Tabla 4 Promedio de los ángulos en las articulaciones del miembro anterior izquierdo
| Fase | Articulación del hombro | Articulación del codo | Articulación del carpo | Articulaciones de los dedos |
| Li | -37.66 | 50.7 | 152.3 | 109 |
| Lf | -24.3 | 69.7 | -132.3 | 106.3 |
| Bi | -22.3 | 117.4 | -66 | 179 |
| Bf | -53.3 | 80.4 | 169.3 | 179.3 |
| Ai | -63.3 | 64.7 | 176.3 | 136.3 |
| Af | -55..6 | 54.5 | 172.6 | 127.6 |
| Ei | -39 | 54.7 | 168.6 | 124 |
| Ef | -29 | 47.7 | 157.6 | 103.3 |
Fuente: Elaboración propia
2) Medición promedio de los ángulos en las articulaciones en el miembro anterior derecho, esto se muestra en la Tabla 5.
Tabla 5 Promedio de los ángulos en las articulaciones del miembro anterior derecho
| Fase | Articulación del hombro | Articulación del codo | Articulación del carpo | Articulaciones de los dedos |
| Li | 158 | -138.33 | -177 | 109 |
| Lf | 148.2 | -127.66 | 116 | 106.33 |
| Bi | 144.4 | -86.33 | 71.33 | 179 |
| Bf | 124 | -72.66 | -177.3 | 179.3 |
| Ai | 118 | -109.33 | -171 | 140.3 |
| Af | 147.4 | -123 | -172.66 | 127.6 |
| Ei | 155.2 | -125.33 | -167.33 | 124 |
| Ef | 157.8 | -135 | -168.33 | 113 |
Fuente: Elaboración propia
3) Medición promedio de los ángulos en las articulaciones en el miembro posterior izquierdo, esto se muestra en la Tabla 6.
Tabla 6 Promedio de los ángulos en las articulaciones del miembro posterior izquierdo
| Fase | Articulación de la cadera | Articulación de la rodilla | Articulación tarsiana | Articulaciones de los dedos del pie |
| Li | -164.6 | -136.3 | 141 | 153 |
| Lf | -164.3 | -123.3 | 133.6 | 124.6 |
| Bi | 167 | -105 | 98.6 | 178.6 |
| Bf | 154.6 | -145 | 127.6 | 176.6 |
| Ai | 158 | -153.3 | 133.6 | 159.6 |
| Af | 168.6 | -142.3 | 128.3 | 149 |
| Ei | 166.3 | -137 | 131.3 | 138.3 |
| Ef | -177.3 | -142 | 132.6 | 117.3 |
Fuente: Elaboración propia
4) Medición promedio de los ángulos en las articulaciones en el miembro posterior derecho, esto se muestra en la Tabla 7.
Tabla 7 Promedio de los ángulos en las articulaciones del miembro posterior derecho
| Fase | Articulación de la cadera | Articulación de la rodilla | Articulación tarsiana | Articulaciones de los dedos del pie |
| Li | 164.3 | 117 | -128 | -133.6 |
| Lf | 168.6 | 113 | -129.3 | -175 |
| Bi | -163 | 108 | -90 | 178.3 |
| Bf | -153.6 | 143.6 | -110.6 | 173.3 |
| Ai | -154.6 | 141.6 | -128.6 | -156.6 |
| Af | -159.6 | 129.3 | -109.6 | -137.6 |
| Ei | -165.3 | 125.3 | -115.6 | 126 |
| Ef | -172.3 | 120.3 | -121.3 | 126.6 |
Fuente: Elaboración propia
Como se puede observar en los resultados, los cambios angulares en las articulaciones de la mano corresponden a movimientos de flexión y extensión.
El diseño de la estructura en TinkerCAD se muestra en la Figura 6.

Se realizó la implementación de actuadores únicamente en las articulaciones del hombro, codo, cadera y rodilla de ambos miembros debido a que se tiene una mayor masa muscular en comparación con la mano y el pie, además de resultar conveniente no aumentar el número de actuadores, esto se muestra en la Figura 7.

Fuente: Elaboración propia
Figura 7 Estructura física donde se aprecian los actualizadores dedicados al desplazamiento del perro
Después del ensamble de la estructura se realizó un análisis en los desplazamientos angulares de los segmentos de la estructura correspondientes a los brazos con tres mediciones diferentes.
En la Tabla 8 se observa el promedio de los ángulos en las articulaciones del miembro anterior izquierdo.
Tabla 8 Promedio de los ángulos en las articulaciones del miembro anterior izquierdo
| Fase | Articulación del hombro | Articulación del codo |
| Li | -32 | 41 |
| Lf | -19.3 | 60.3 |
| Bi | -16.6 | 110.3 |
| Bf | -44 | 73.6 |
| Ai | -56 | 59.3 |
| Af | -46.3 | 54.5 |
| Ei | -39 | 46.3 |
| Ef | -29 | 39.6 |
Fuente: Elaboración propia
La Tabla 9 muestra el promedio de los ángulos en las articulaciones del miembro anterior derecho.
Tabla 9 Promedio de los ángulos en las articulaciones del miembro anterior derecho
| Fase | Articulación del hombro | Articulación del codo |
| Li | 151 | -133 |
| Lf | 141 | -115 |
| Bi | 133 | -79 |
| Bf | 115 | -64 |
| Ai | 106 | -103 |
| Af | 138 | -111 |
| Ei | 147 | -116 |
| Ef | 150 | -129 |
Fuente: Elaboración propia
La Tabla 10 muestra el promedio de los ángulos en las articulaciones del miembro posterior izquierdo.
Tabla 10 Promedio de los ángulos en las articulaciones del miembro posterior izquierdo
| Fase | Articulación de la cadera | Articulación de la rodilla |
| Li | -153.3 | -128 |
| Lf | -156-3 | -115.6 |
| Bi | 154.6 | -99.3 |
| Bf | 146.3 | -137.6 |
| Ai | 147.3 | -145.6 |
| Af | 161.3 | -135 |
| Ei | 158 | -131.6 |
| Ef | -170.6 | -136.3 |
Fuente: Elaboración propia.
La Tabla 11 muestra el promedio de los ángulos en las articulaciones del miembro posterior derecho.
Discusión
De acuerdo con los resultados obtenidos, el sistema propuesto cumple con su función de dar soporte y proveer de movimiento a un perro de raza pequeña. En trabajos semejantes como el de Bustos (2020) se presenta el desarrollo de una prótesis canina que amplía la capacidad y autonomía en el desplazamiento de perros, al igual que el propuesto, dicho diseño fue concebido para perros de raza pequeña donde el diseño se basa en la propuesta de un carro (andador), cuyos componentes funcionan dinámicamente, lo que permite que el canino pueda adoptar una posición de descanso. En este sentido, el diseño descrito a lo largo de este trabajo considera indispensable contar con una posición cómoda para el animal, además de favorecer el movimiento de las extremidades con el fin de mantener el tono muscular.
Entre los trabajos similares destaca también el presentado por San miguel, Díaz y Vega (2021), quienes recurrieron al software SolidWorks 3D para el diseño de un prototipo de apoyo para perros. Análogamente, para el diseño propuesto en este trabajo se tomaron en cuenta los resultados obtenidos en el análisis de marcha a partir de la aplicación del software Kinovea, esto facilitó el diseño de la estructura, la cual fue trazada con la aplicación TinkerCAD, que a su vez permitió ejemplificar varias opciones. Y dado los requerimientos planteados, se optó por un diseño que fuera liviano, sencillo en su construcción, pero a su vez robusto para soportar el peso y la fuerza mecánica ejercida por el perro, tal y como se especifica líneas arriba.
Por su parte, Meza, Vázquez, Muñoz y Monfil (2018) presentaron un prototipo de silla de cuatro ruedas el cual, de acuerdo con los autores, puede ser adaptable a cualquier perro. En este trabajo, al igual que el desarrollado en la Unidad Profesional Interdisciplinaria de Biotecnología (UPIBI) del IPN, fue necesario contar con un mecanismo que permitiera la movilidad del animal mientras este se encontrara en etapa de recuperación.
Uno de los criterios que se consideraron en la construcción del sistema propuesto fue el empleo de materiales livianos con la finalidad de no generar un esfuerzo adicional al animal que utilizara el mecanismo. En el trabajo desarrollado por Bros (2008) se presenta un proyecto de soporte tipo silla de ruedas canina con la característica de que el material empleado para su construcción es PVC; un diseño similar es el propuesto por Charbonneau, Sellen y Seeschaaf (2016), quienes diseñaron una silla de ruedas a partir de impresión 3D. En este estudio se mencionan las ventajas y desventajas que se tienen al implementar las tecnologías de asistencias descargables (DAT, por sus siglas en inglés) para la construcción de la silla de ruedas. En comparación, el trabajo desarrollado en la UPIBI donde se consideraron aspectos importantes de la anatomía del perro, el funcionamiento de las articulaciones y los movimientos en los miembros anteriores y posteriores. El análisis de marcha permitió comprender la relación que existe entre las articulaciones y el movimiento que favorece el desplazamiento del animal a partir de lo cual se propuso el diseño y la elección del material, esto es. aluminio dadas sus características de rigidez y peso.
Aunado a los ejemplos anteriores, García (2019) realizó una prótesis mecatrónica inteligente basada en un controlador difuso y un sistema embebido que procesa el movimiento a través de un sensor de posición. Para el sistema propuesto en este trabajo, el sistema de control se realizó mediante un microcontrolador para coordinar el movimiento de los actuadores acoplados a unas ruedas de plástico para facilitar el desplazamiento y minimizar el esfuerzo del perro, con la secuencia obtenida a partir del análisis cinemático, se realizó el algoritmo correspondiente para programar un sistema de control basado en la plataforma Arduino en la cual se conectaron los servomotores cuyas instrucciones de control provienen de dos sensores SW-520D, los cuales fueron colocados sobre la estructura correspondiente a los segmentos de la mano con el fin de obtener la señal de inicio de secuencia de paso.
De acuerdo con lo que señalan Megia, Zapirain y Antoñana (2021), las pruebas llevadas a cabo en el laboratorio han demostrado la viabilidad del diseño personalizado de órtesis inte ligentes para animales de compañía con problemas de movilidad. Con el sistema propuesto se obtuvieron datos mediante una comparación de medias muestrales con un ensayo de tipo tStudent,con un α=0.05 a dos colas para la articulación de la rodilla del miembro posterior derecho en fase de elevación, Ho μ = 127.66 Hi μ ≠ 127.66, se tiene un valor estadístico t de -2.8721. El valor crítico, según las tablas, es de±2.3534, por lo que se encuentra fuera del intervalo.
Esto llevó a reflexionar en la funcionalidad del mecanismo observándose que en las pruebas el animal presenta ligeros cambios en el andar, variaciones que se atribuyen al acoplamiento del mecanismo además de considerar que el perro como sujeto de prueba no presentaba daño físico que afectase su movimiento, por lo que al acoplarse el mecanismo este trata de mantener su marcha normal, por consiguiente, dicho efecto de corrección en el andar afecta los valores en los resultados obtenidos. Por otro lado, sabiendo que los ángulos del dispositivo son diferentes a los obtenidos del análisis de marcha, al cambiar el nivel de significación a 0.025, el valor crítico es de ±3.128, por lo que en este caso el resultado obtenido se considera significativo.
A partir de la revisión documental de trabajos semejantes, se puede decir que se encuentra un área de oportunidad y mejora en el sistema propuesto. Esto abre la oportunidad para realizar diversas pruebas en los materiales de construcción, la ergonomía del diseño y en los sistemas de control y censado, cabe mencionar que este es uno de los trabajos de investigación desarrollados en el área biomédica dentro de la UPIBI, por lo que se continúa trabajando dentro de este campo disciplinar de la medicina veterinaria.
Conclusiones
Dentro de la formación de los estudiantes de ingeniería Biomédica se encuentra la capacitación para desarrollar y difundir conocimientos, así como para resolver los retos tecnológicos y éticos presentes en las áreas de la salud. Sin duda el trabajo desarrollado en este escrito es muestra de una aplicación en el área de la medicina veterinaria, una alternativa viable de solución a la falta de movilidad en perros de raza pequeña. Se pudo observar a través de los resultados obtenidos que el diseño del dispositivo logró la reproducción de las secuencias de movimiento, esto es, reproducir los movimientos de flexión y extensión en las fases adecuadas.
Así, se cumplió con el objetivo general, ya que el dispositivo reproduce movimientos de manera similar a las secuencias normales, aunque hay un área de mejora en relación con los valores obtenidos, pues existe una ligera variación que se atribuye a la estructura, ya que el eje del servomotor es por medio de engranes los cuales son susceptibles de presentar un desajuste por tensión mecánica.
Se da respuesta de manera positiva a la pregunta de investigación planteada, puesto que el diseño y construcción del prototipo propuesto presenta una alternativa de bajo costo y de gran potencial en la rehabilitación de perros pequeños cuando estos presentan una condición que afecta su movilidad.
Futuras líneas de investigación
A partir de los resultados experimentales obtenidos del sistema mecánico, se han puesto de manifiesto líneas de investigación con las que se puede mejorar este proyecto. A continuación, se presentan algunas:
Desarrollo de un sistema electrónico más robusto que permita el control de cambio de fase y la adaptación de la velocidad de avance de acuerdo con lo censado, esto para facilitar el cambio en la velocidad y ajustar el tipo de avance según la evolución de mejora del perro.
Análisis de un muestreo más amplio para minimizar el error en las lecturas para mejorar el sistema de tracción.
Ensayos con perros de diversas razas para ajustar las características al sistema desarrollado con la finalidad de que pueda ser implementado a las necesidades particulares que se presenten a partir de la comparación de los parámetros angulares.
Pruebas de esfuerzo en diversos materiales con la finalidad de contar con otras opciones en el empleo de materiales haciendo el sistema más liviano, pero cumpliendo la funcionalidad y rigidez necesaria para la rehabilitación del animal.

